Python OpenCV 绘图
前言
opencv-python 4.3.2
官网参考资料
1. 绘图 API
1.1 线段
img = cv.line(img, pt1, pt2, color[, thickness[, lineType[, shift]]])
'''
参数:
ndarray img 图像
tuple pt1 起点
tuple pt2 终点
tuple/list color 颜色
int thickness=1 粗细
int lineType=cv.LINE_8 线型
int shift=0 Number of fractional bits in the point coordinates.
点坐标中的小数位数。
注:
pt1, pt2 可以超出图像的大小范围, 支持负数
lineType 和 shift 后面单独说明
'''
1.2 lineType、shift 参数说明
(1)lineType
'''
对应值 含义
cv.FILLED -1 图形填充
cv.LINE_4 4 4-connected line
cv.LINE_8 8 8-connected line
cv.LINE_AA 16 抗锯齿线
'''
(2)shift
'''
使输入的坐标、半径等都除以 2**shift
小数位数指的是二进制的小数位数, 效果类似右移 shift 位作为当前值
做个简单的测试
'''
import numpy as np
import cv2
img = np.zeros((256,256,3), np.uint8)
for i in range(4):
cv2.circle(img, (200, 200), 80, (255,255,255), 1, 16, i)
cv2.imshow('test', img)
cv2.waitKey(0)
cv2.destroyAllWindows()

1.3 折线 / 多边形
img = cv.polylines(img, pts, isClosed, color[, thickness[, lineType[, shift]]])
'''
参数:
ndarray pts 折线 / 多边形各个点的坐标, 输入 shape 为 [1,n,2]
bool isClosed 是否闭合, 设为 True 则起点和终点相连
注:
这里即使设 isClosed=True, 也不能通过 thickness=-1 使图案填充, 会直接报错
'''
# 常用方法
rect = np.array([[[x1,y1], [x2,y2], [x3,y3]]], np.int32)
cv2.polylines(img, rect, False, color, thickness, lineType)
1.4 圆
cv.circle(img, center, radius, color[, thickness[, lineType[, shift]]])
'''
参数:
tuple center 圆心坐标
int radius 半径
'''
1.5 椭圆 / 半圆 / 弧线
cv.ellipse(img, center, axes, angle, startAngle, endAngle, color[, thickness[, lineType[, shift]]])
'''
参数:
tuple center 圆心坐标
tuple axes (x,y): xy 方向的半轴长
double angle 椭圆顺时针旋转角度
double startAngle 起点角度 (0为x轴正方向, 顺时针方向为正, 如90为y轴正方向)
double endAngle 终点角度 (这里的y轴正方向和平时的xy坐标系不同, 向下为正方向)
'''
1.6 矩形
cv.rectangle(img, pt1, pt2, color[, thickness[, lineType[, shift]]])
'''
参数:
tuple pt1 矩形左上角点
tuple pt2 矩形右下角点
'''
1.7 箭头线
cv.arrowedLine(img, pt1, pt2, color[, thickness[, line_type[, shift[, tipLength]]]])
'''
参数:
double tipLength=0.1 箭尖/箭长的比例
'''
1.8 标记
cv.drawMarker(img, position, color[, markerType[, markerSize[, thickness[, line_type]]]])
'''
参数:
tuple position 标记坐标
int markerType 标记类型
cv.MARKER_CROSS +
cv.MARKER_TILTED_CROSS ×
cv.MARKER_STAR + 和 × 叠加
cv.MARKER_DIAMOND ◇
cv.MARKER_SQUARE □
cv.MARKER_TRIANGLE_UP △
cv.MARKER_TRIANGLE_DOWN ▽
'''
2. 应用示例
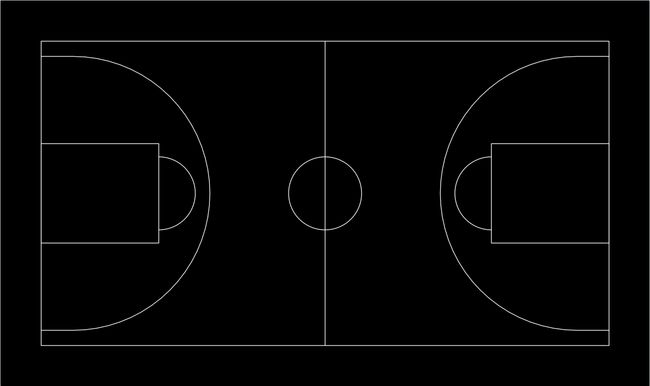
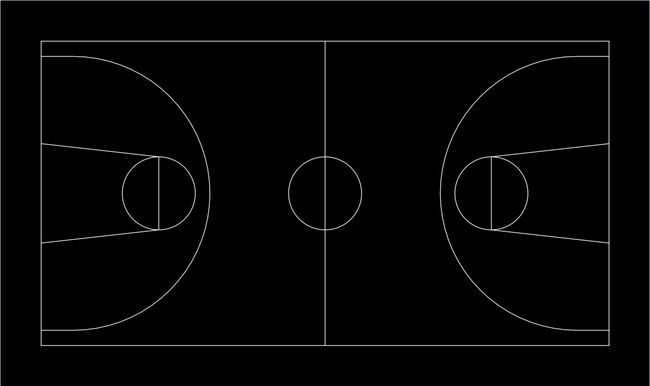
2.1 篮球场
import cv2
import numpy as np
def DrawBorder(img, length, width, border, color, line_wide=2, line_type=cv2.LINE_AA):
cv2.rectangle(img, (border, border), (border+length, border+width), color, line_wide, line_type)
def DrawMidline(img, length, width, border, radius, color, line_wide=2, line_type=cv2.LINE_AA):
cv2.line(img, (border+length//2, border), (border+length//2, border+width), color, line_wide, line_type)
cv2.circle(img, (border+length//2, border+width//2), radius, color, line_wide, line_type)
def DrawThreepointline(img, length, width, border, border_3pl, radius, color, line_wide=2, line_type=cv2.LINE_AA):
'''
border_3pl: 三分线半圆圆心与边线距离
radius: 三分线半圆半径
'''
cv2.ellipse(img, (border+border_3pl, border+width//2), (radius, radius), 0, -90, 90, color, line_wide, line_type)
cv2.line(img, (border, border+width//2-radius), (border+border_3pl, border+width//2-radius), color, line_wide, line_type)
cv2.line(img, (border, border+width//2+radius), (border+border_3pl, border+width//2+radius), color, line_wide, line_type)
cv2.ellipse(img, (border+length-border_3pl, border+width//2), (radius, radius),180, -90, 90, color, line_wide, line_type)
cv2.line(img, (border+length-border_3pl, border+width//2-radius), (border+length, border+width//2-radius), color, line_wide, line_type)
cv2.line(img, (border+length-border_3pl, border+width//2+radius), (border+length, border+width//2+radius), color, line_wide, line_type)
def Draw3szone(img, length, width, border, z_length, z_width, radius, color, zone_type=1, line_wide=2, line_type=cv2.LINE_AA):
'''
zone_type: 1矩形、2梯形
'''
if zone_type==1:
cv2.rectangle(img, (border, border+width//2-z_width//2),
(border+z_length, border+width//2+z_width//2), color, line_wide, line_type)
cv2.ellipse(img, (border+z_length, border+width//2), (radius, radius), 0, -90, 90, color, line_wide, line_type)
cv2.rectangle(img, (border+length-z_length, border+width//2-z_width//2),
(border+length, border+width//2+z_width//2), color, line_wide, line_type)
cv2.ellipse(img, (border+length-z_length, border+width//2), (radius, radius), 180, -90, 90, color, line_wide, line_type)
elif zone_type==2:
rect = np.array([[[border, border+width//2-z_width//2],
[border+z_length, border+width//2-radius],
[border+z_length, border+width//2+radius],
[border, border+width//2+z_width//2]]], np.int32)
cv2.polylines(img, rect, False, color, line_wide, line_type)
cv2.circle(img, (border+z_length, border+width//2), radius, color, line_wide, line_type)
rect = np.array([[[border+length, border+width//2-z_width//2],
[border+length-z_length, border+width//2-radius],
[border+length-z_length, border+width//2+radius],
[border+length, border+width//2+z_width//2]]], np.int32)
cv2.polylines(img, rect, False, color, line_wide, line_type)
cv2.circle(img, (border+length-z_length, border+width//2), radius, color, line_wide, line_type)
white = (255,255,255)
black = (0,0,0)
blue = (255,0,0)
green = (0,255,0)
red = (0,0,255)
scale = 100
line_color = white
background_color = black
# 球场各参数
border = int(2 * scale) # 边界
length = int(28 * scale) # 场地长
width = int(15 * scale) # 场地宽
radius = int(1.8 * scale) # 圆圈半径
# 三分线
radius_3pl = int(6.75 * scale) # 三分线圆圈半径
border_3pl = int(1.57 * scale) # 三分线圆心与边界距离
# 三秒区
type_3szone = 1 # 三秒区类型, 1为矩形, 2为梯形
length_3szone = int(5.8 * scale) # 矩形/梯形长
width_3szone = int(4.9 * scale) # 矩形/梯形宽
img = (background_color * np.ones((width+border*2, length+border*2, 3))).astype(np.uint8)
DrawBorder(img, length, width, border, line_color)
DrawMidline(img, length, width, border, radius, line_color)
DrawThreepointline(img, length, width, border, border_3pl, radius_3pl, line_color)
Draw3szone(img, length, width, border, length_3szone, width_3szone, radius, line_color, type_3szone)
# 显示
cv2.namedWindow('test', 0)
cv2.resizeWindow('test', int(28*40+2*40), int(15*40+2*40))
cv2.imshow('test', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 存储
# cv2.imwrite("basketball_court_01.jpg", img)