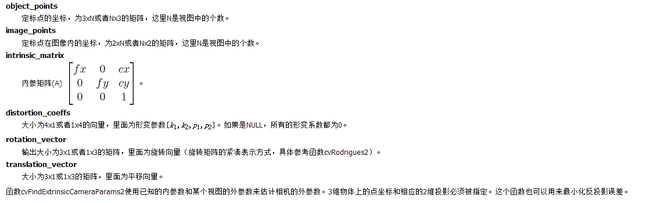
利用cvFindExtrinsicCameraParams2求取相机外参数
cvFindExtrinsicCameraParams2函数的定义:
1 void cvFindExtrinsicCameraParams2( const CvMat* object_points, 2 const CvMat* image_points, 3 const CvMat* intrinsic_matrix, 4 const CvMat* distortion_coeffs, 5 CvMat* rotation_vector, 6 CvMat* translation_vector );
1 #include <cv.h> 2 #include <highgui.h> 3 #include <stdio.h> 4 #include <stdlib.h> 5 6 int n_boards = 0; //Will be set by input list 7 const int board_dt = 10; 8 int board_w; 9 int board_h; 10 11 12 void help() 13 { 14 printf("Calibration from disk. Call convention:\n\n" 15 "Where: board_{w,h} are the # of internal corners in the checkerboard\n" 16 " width (board_w) and height (board_h)\n" 17 " image_list is space separated list of path/filename of checkerboard\n" 18 " images\n\n" 19 "Hit 'p' to pause/unpause, ESC to quit. After calibration, press any other key to step through the images\n\n"); 20 } 21 22 int main(int argc, char* argv[]) 23 { 24 25 CvCapture* capture;// = cvCreateCameraCapture( 0 ); 26 // assert( capture ); 27 28 if(argc != 4) 29 { 30 help(); 31 return -1; 32 } 33 help(); 34 board_w = atoi(argv[1]); 35 board_h = atoi(argv[2]); 36 int board_n = board_w * board_h; 37 CvSize board_sz = cvSize( board_w, board_h ); 38 FILE *fptr = fopen(argv[3],"r"); 39 char names[2048]; 40 //COUNT THE NUMBER OF IMAGES: 41 while(fscanf(fptr,"%s ",names)==1) 42 { 43 n_boards++; 44 } 45 rewind(fptr); 46 47 cvNamedWindow( "Calibration" ); 48 //ALLOCATE STORAGE 49 CvMat* image_points = cvCreateMat(board_n,2,CV_32FC1); 50 CvMat* object_points = cvCreateMat(board_n,3,CV_32FC1); 51 //CvMat* point_counts = cvCreateMat(1,CV_32SC1); 52 53 54 CvMat *intrinsic = (CvMat*)cvLoad("Intrinsicsr.xml"); 55 CvMat *distortion = (CvMat*)cvLoad("Distortionr.xml"); 56 CvMat* rotation_vector=cvCreateMat(3,1,CV_32FC1); 57 CvMat* translation_vector=cvCreateMat(3,1,CV_32FC1); 58 CvMat* rotation_mat=cvCreateMat(3,3,CV_32FC1); 59 CvMat* jacobian=cvCreateMat(3,1,CV_32FC1); 60 61 62 63 IplImage* image = 0;// = cvQueryFrame( capture ); 64 IplImage* gray_image = 0; //for subpixel 65 CvPoint2D32f* corners = new CvPoint2D32f[ board_n ]; 66 int corner_count; 67 68 fscanf(fptr,"%s ",names); 69 image = cvLoadImage( names); 70 if(gray_image == 0 && image) //We'll need this for subpixel accurate stuff 71 gray_image = cvCreateImage(cvGetSize(image),8,1); 72 73 if(!image) 74 printf("null image\n"); 75 76 int found = cvFindChessboardCorners( 77 image, 78 board_sz, 79 corners, 80 &corner_count, 81 CV_CALIB_CB_ADAPTIVE_THRESH | CV_CALIB_CB_FILTER_QUADS 82 ); 83 84 //Get Subpixel accuracy on those corners 85 cvCvtColor(image, gray_image, CV_BGR2GRAY); 86 cvFindCornerSubPix(gray_image, corners, corner_count, 87 cvSize(11,11),cvSize(-1,-1), cvTermCriteria( CV_TERMCRIT_EPS+CV_TERMCRIT_ITER, 30, 0.1 )); 88 //Draw it 89 90 cvDrawChessboardCorners(image, board_sz, corners, corner_count, found); 91 cvShowImage( "Calibration", image ); 92 if( corner_count == board_n ) 93 printf("Found = %d for %s\n",found,names); 94 for( int i=0; i<board_n; ++i ) 95 { 96 CV_MAT_ELEM(*image_points, float,i,0) = corners[i].x; 97 CV_MAT_ELEM(*image_points, float,i,1) = corners[i].y; 98 CV_MAT_ELEM(*object_points,float,i,0) = i/board_w; 99 CV_MAT_ELEM(*object_points,float,i,1) = i%board_w; 100 CV_MAT_ELEM(*object_points,float,i,2) = 0.0f; 101 } 102 103 cvFindExtrinsicCameraParams2( 104 object_points,image_points,intrinsic,distortion,rotation_vector,translation_vector 105 ); 106 cvRodrigues2( 107 rotation_vector,rotation_mat,jacobian=NULL 108 ); 109 cvSave("Rotationr.xml",rotation_mat); 110 cvSave("Translationr.xml",translation_vector); 111 }