CHAPTER 11-Training Deep Neural Nets-part2
本篇文章是个人翻译的,如有商业用途,请通知本人谢谢.
Reusing Pretrained Layers (重用预训练层)
从零开始训练一个非常大的DNN通常不是一个好主意,相反,您应该总是尝试找到一个现有的神经网络来完成与您正在尝试解决的任务类似的任务,然后重新使用这个较低层的 网络:这就是所谓的迁移学习。 这不仅会大大加快培训速度,还将需要更少的培训数据。
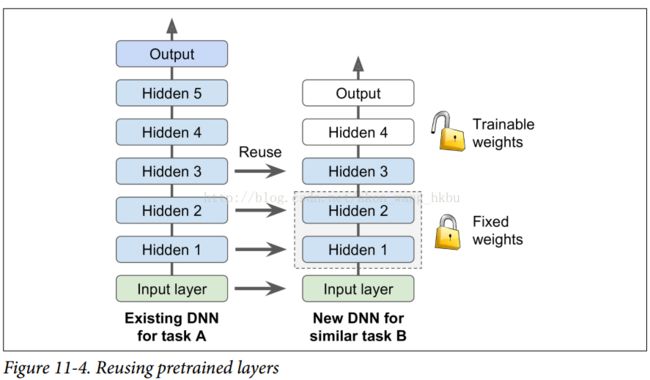
例如,假设您可以访问经过培训的DNN,将图片分为100个不同的类别,包括动物,植物,车辆和日常物品。 您现在想要训练一个DNN来对特定类型的车辆进行分类。 这些任务非常相似,因此您应该尝试重新使用第一个网络的一部分(请参见图11-4)。
如果新任务的输入图像与原始任务中使用的输入图像的大小不一致,则必须添加预处理步骤以将其大小调整为原始模型的预期大小。 更一般地说,如果输入具有类似的低级层次的特征,则迁移学习将很好地工作。
Reusing a TensorFlow Model
如果原始模型使用TensorFlow进行训练,则可以简单地将其恢复并在新任务上进行训练:
[...] # construct the original model
with tf.Session() as sess: saver.restore(sess, "./my_model_final.ckpt") # continue training the model...
完整代码:
n_inputs = 28 * 28 # MNIST n_hidden1 = 300 n_hidden2 = 50 n_hidden3 = 50 n_hidden4 = 50 n_outputs = 10 X = tf.placeholder(tf.float32, shape=(None, n_inputs), name="X") y = tf.placeholder(tf.int64, shape=(None), name="y") with tf.name_scope("dnn"): hidden1 = tf.layers.dense(X, n_hidden1, activation=tf.nn.relu, name="hidden1") hidden2 = tf.layers.dense(hidden1, n_hidden2, activation=tf.nn.relu, name="hidden2") hidden3 = tf.layers.dense(hidden2, n_hidden3, activation=tf.nn.relu, name="hidden3") hidden4 = tf.layers.dense(hidden3, n_hidden4, activation=tf.nn.relu, name="hidden4") hidden5 = tf.layers.dense(hidden4, n_hidden5, activation=tf.nn.relu, name="hidden5") logits = tf.layers.dense(hidden5, n_outputs, name="outputs") with tf.name_scope("loss"): xentropy = tf.nn.sparse_softmax_cross_entropy_with_logits(labels=y, logits=logits) loss = tf.reduce_mean(xentropy, name="loss") with tf.name_scope("eval"): correct = tf.nn.in_top_k(logits, y, 1) accuracy = tf.reduce_mean(tf.cast(correct, tf.float32), name="accuracy") learning_rate = 0.01 threshold = 1.0 optimizer = tf.train.GradientDescentOptimizer(learning_rate) grads_and_vars = optimizer.compute_gradients(loss) capped_gvs = [(tf.clip_by_value(grad, -threshold, threshold), var) for grad, var in grads_and_vars] training_op = optimizer.apply_gradients(capped_gvs) init = tf.global_variables_initializer() saver = tf.train.Saver()
with tf.Session() as sess: saver.restore(sess, "./my_model_final.ckpt") for epoch in range(n_epochs): for iteration in range(mnist.train.num_examples // batch_size): X_batch, y_batch = mnist.train.next_batch(batch_size) sess.run(training_op, feed_dict={X: X_batch, y: y_batch}) accuracy_val = accuracy.eval(feed_dict={X: mnist.test.images, y: mnist.test.labels}) print(epoch, "Test accuracy:", accuracy_val) save_path = saver.save(sess, "./my_new_model_final.ckpt")
但是,一般情况下,您只需要重新使用原始模型的一部分(就像我们将要讨论的那样)。 一个简单的解决方案是将Saver配置为仅恢复原始模型中的一部分变量。 例如,下面的代码只恢复隐藏的层1,2和3:
n_inputs = 28 * 28 # MNIST n_hidden1 = 300 # reused n_hidden2 = 50 # reused n_hidden3 = 50 # reused n_hidden4 = 20 # new! n_outputs = 10 # new! X = tf.placeholder(tf.float32, shape=(None, n_inputs), name="X") y = tf.placeholder(tf.int64, shape=(None), name="y") with tf.name_scope("dnn"): hidden1 = tf.layers.dense(X, n_hidden1, activation=tf.nn.relu, name="hidden1") # reused hidden2 = tf.layers.dense(hidden1, n_hidden2, activation=tf.nn.relu, name="hidden2") # reused hidden3 = tf.layers.dense(hidden2, n_hidden3, activation=tf.nn.relu, name="hidden3") # reused hidden4 = tf.layers.dense(hidden3, n_hidden4, activation=tf.nn.relu, name="hidden4") # new! logits = tf.layers.dense(hidden4, n_outputs, name="outputs") # new! with tf.name_scope("loss"): xentropy = tf.nn.sparse_softmax_cross_entropy_with_logits(labels=y, logits=logits) loss = tf.reduce_mean(xentropy, name="loss") with tf.name_scope("eval"): correct = tf.nn.in_top_k(logits, y, 1) accuracy = tf.reduce_mean(tf.cast(correct, tf.float32), name="accuracy") with tf.name_scope("train"): optimizer = tf.train.GradientDescentOptimizer(learning_rate) training_op = optimizer.minimize(loss)
[...] # build new model with the same definition as before for hidden layers 1-3
reuse_vars = tf.get_collection(tf.GraphKeys.GLOBAL_VARIABLES, scope="hidden[123]") # regular expression reuse_vars_dict = dict([(var.op.name, var) for var in reuse_vars]) restore_saver = tf.train.Saver(reuse_vars_dict) # to restore layers 1-3 init = tf.global_variables_initializer() saver = tf.train.Saver() with tf.Session() as sess: init.run() restore_saver.restore(sess, "./my_model_final.ckpt") for epoch in range(n_epochs): # not shown in the book for iteration in range(mnist.train.num_examples // batch_size): # not shown X_batch, y_batch = mnist.train.next_batch(batch_size) # not shown sess.run(training_op, feed_dict={X: X_batch, y: y_batch}) # not shown accuracy_val = accuracy.eval(feed_dict={X: mnist.test.images, # not shown y: mnist.test.labels}) # not shown print(epoch, "Test accuracy:", accuracy_val) # not shown save_path = saver.save(sess, "./my_new_model_final.ckpt")首先我们建立新的模型,确保复制原始模型的隐藏层1到3.我们还创建一个节点来初始化所有变量。 然后我们得到刚刚用“trainable = True”(这是默认值)创建的所有变量的列表,我们只保留那些范围与正则表达式“hidden [123]”相匹配的变量(即,我们得到所有可训练的 隐藏层1到3中的变量)。 接下来,我们创建一个字典,将原始模型中每个变量的名称映射到新模型中的名称(通常需要保持完全相同的名称)。 然后,我们创建一个Saver,它将只恢复这些变量,并且创建另一个Saver来保存整个新模型,而不仅仅是第1层到第3层。然后,我们开始一个会话并初始化模型中的所有变量,然后从 原始模型的层1到3.最后,我们在新任务上训练模型并保存。
任务越相似,您可以重复使用的层越多(从较低层开始)。 对于非常相似的任务,您可以尝试保留所有隐藏的图层,然后替换输出图层。
Reusing Models from Other Frameworks
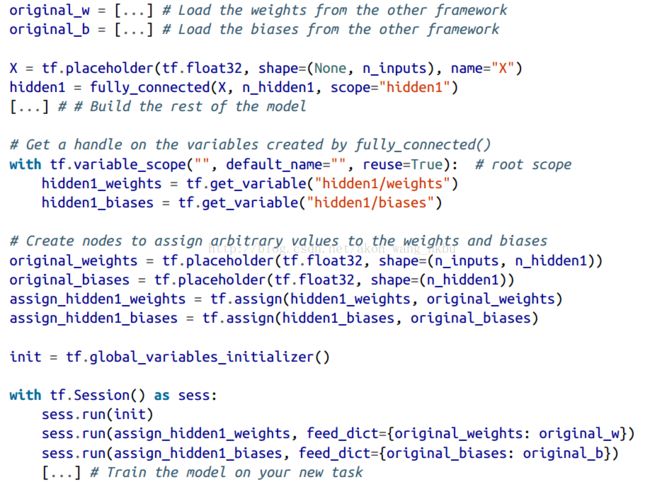
如果模型是使用其他框架进行训练的,则需要手动加载权重(例如,如果使用Theano训练,则使用Theano代码),然后将它们分配给相应的变量。 这可能是相当乏味的。 例如,下面的代码显示了如何复制使用另一个框架训练的模型的第一个隐藏层的权重和偏置:
Freezing the Lower Layers
第一个DNN的低层可能已经学会了检测图片中的低级特征,这将在两个图像分类任务中有用,因此您可以按照原样重新使用这些图层。 在训练新的DNN时,“冻结”权重通常是一个好主意:如果下层权重是固定的,那么上层权重将更容易训练(因为他们不需要学习一个移动的目标)。 要在训练期间冻结较低层,最简单的解决方案是给优化器列出要训练的变量,不包括来自较低层的变量:

第一行获得隐藏层3和4以及输出层中所有可训练变量的列表。 这留下了隐藏层1和2中的变量。接下来,我们将这个受限制的可列表变量列表提供给optimizer的minimize()函数。当当! 现在,图层1和图层2被冻结:在训练过程中不会发生变化(通常称为冻结图层)。
Caching the Frozen Layers (缓存冻层)
由于冻结层不会改变,因此可以为每个训练实例缓存最上面的冻结层的输出。 由于训练贯穿整个数据集很多次,这将给你一个巨大的速度提升,因为每个训练实例只需要经过一次冻结层(而不是每个时期一次)。 例如,你可以先运行整个训练集(假设你有足够的内存):
hidden2_outputs = sess.run(hidden2, feed_dict={X: X_train})
最后一行运行先前定义的训练操作(冻结图层1和2),并从第二个隐藏层(以及该批次的目标)为其输出一批输出。 因为我们给TensorFlow隐藏层2的输出,所以它不会去评估它(或者它所依赖的任何节点)。
Tweaking, Dropping, or Replacing the Upper Layers (调整,删除或替换上层)
原始模型的输出层通常应该被替换,因为对于新的任务来说,最有可能没有用处,甚至可能没有适合新任务的输出。
类似地,原始模型的上层隐藏层不太可能像下层一样有用,因为对于新任务来说最有用的高层特征可能与对原始任务最有用的高层特征明显不同。 你想找到正确的层数来重用。
尝试先冻结所有复制的图层,然后训练模型并查看它是如何执行的。 然后尝试解冻一个或两个顶层隐藏层,让反向传播调整它们,看看性能是否提高。 您拥有的训练数据越多,您可以解冻的层数就越多。
如果仍然无法获得良好的性能,并且您的训练数据很少,请尝试删除顶部的隐藏层,并再次冻结所有剩余的隐藏层。 您可以迭代,直到找到正确的层数重复使用。 如果您有足够的训练数据,您可以尝试替换顶部的隐藏层,而不是放下它们,甚至可以添加更多的隐藏层。
Model Zoos
你在哪里可以找到一个类似于你想要解决的任务训练的神经网络? 首先看看显然是在你自己的模型目录。 这是保存所有模型并组织它们的一个很好的理由,以便您以后可以轻松地检索它们。 另一个选择是在模型动物园中搜索。 许多人为了各种不同的任务而训练机器学习模型,并且善意地向公众发布预训练模型。
TensorFlow在https://github.com/tensor流/ models中有自己的模型动物园。 特别是,它包含了大多数最先进的图像分类网络,如VGG,Inception和ResNet(参见第13章,检查模型/ slim目录),包括代码,预训练模型和 工具来下载流行的图像数据集。
另一个流行的模型动物园是Caffe模型动物园。 它还包含许多在各种数据集(例如,ImageNet,Places数据库,CIFAR10等)上训练的计算机视觉模型(例如,LeNet,AlexNet,ZFNet,GoogLeNet,VGGNet,开始)。 Saumitro Dasgupta写了一个转换器,可以在https://github.com/ethereon/ca‰etensorflow.
Unsupervised Pretraining(无监督的预训练)
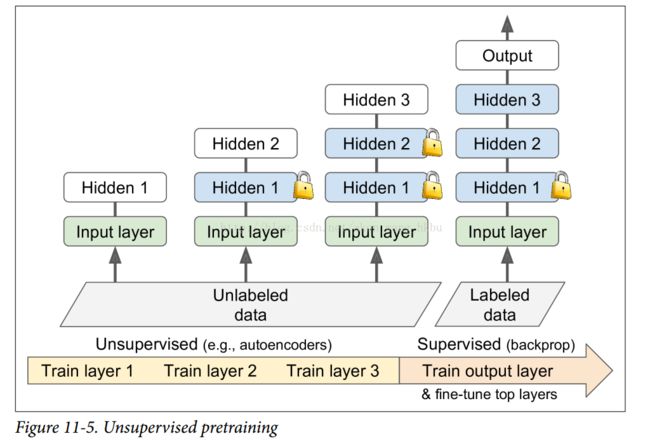
假设你想要解决一个复杂的任务,你没有太多的标记的训练数据,但不幸的是,你不能找到一个类似的任务训练模型。 不要失去所有希望! 首先,你当然应该尝试收集更多的有标签的训练数据,但是如果这太难或太昂贵,你仍然可以进行无监督的训练(见图11-5)。 也就是说,如果你有很多未标记的训练数据,你可以尝试逐层训练图层,从最低层开始,然后上升,使用无监督的特征检测器算法,如限制玻尔兹曼机器(RBMs;见附录E )或自动编码器(见第15章)。 每个图层都被训练成先前训练过的图层的输出(除了被训练的图层之外的所有图层都被冻结)。 一旦所有图层都以这种方式进行了训练,就可以使用监督式学习(即反向传播)对网络进行微调。
这是一个相当漫长而乏味的过程,但通常运作良好。 实际上,这是Geoffrey Hinton和他的团队在2006年使用的技术,导致了神经网络的复兴和深度学习的成功。 直到2010年,无监督预训练(通常使用RBMs)是深网的标准,只有在消失梯度问题得到缓解之后,纯训练DNN才更为普遍。 然而,当您有一个复杂的任务需要解决时,无监督训练(现在通常使用自动编码器而不是RBM)仍然是一个很好的选择,没有类似的模型可以重复使用,而且标记的训练数据很少,但是大量的未标记的训练数据。(另一个选择是提出一个监督的任务,您可以轻松地收集大量标记的训练数据,然后使用迁移学习,如前所述。 例如,如果要训练一个模型来识别图片中的朋友,你可以在互联网上下载数百万张脸并训练一个分类器来检测两张脸是否相同,然后使用此分类器将新图片与你朋友的每张照片做比较。)
Pretraining on an Auxiliary Task (在辅助任务上预训练)
最后一种选择是在辅助任务上训练第一个神经网络,您可以轻松获取或生成标记的训练数据,然后重新使用该网络的较低层来完成您的实际任务。 第一个神经网络的下层将学习可能被第二个神经网络重复使用的特征检测器。
例如,如果你想建立一个识别面孔的系统,你可能只有几个人的照片 - 显然不足以训练一个好的分类器。 收集每个人的数百张照片将是不实际的。 但是,您可以在互联网上收集大量随机人员的照片,并训练第一个神经网络来检测两张不同的照片是否属于同一个人。 这样的网络将学习面部优秀的特征检测器,所以重复使用它的较低层将允许你使用很少的训练数据来训练一个好的面部分类器。
收集没有标签的训练样本通常是相当便宜的,但标注它们却相当昂贵。 在这种情况下,一种常见的技术是将所有训练样例标记为“好”,然后通过破坏好的训练样例产生许多新的训练样例,并将这些样例标记为“坏”。然后,您可以训练第一个神经网络 将实例分类为好或不好。 例如,您可以下载数百万个句子,将其标记为“好”,然后在每个句子中随机更改一个单词,并将结果语句标记为“不好”。如果神经网络可以告诉“狗睡觉”是好的 句子,但“他们的狗”是坏的,它可能知道相当多的语言。 重用其较低层可能有助于许多语言处理任务。
另一种方法是训练第一个网络为每个训练实例输出一个分数,并使用一个损失函数确保一个好的实例的分数大于一个坏实例的分数至少一定的边际。 这被称为最大边际学习.