使用Indemind双目模组跑ORB_SLAM3
文章目录
- Indemind双目模组跑通ORB_SLAM3
-
- 1.下载源码编译
- 2.ROS编译错误
- 3.配置文件
- Indmeind跑ORB_SLAM3的VIO
-
- 1.按照ORB_SLAM3正常编译即可
- 2.运行
- Indemind双目模组跑ORB_SLAM3实测
Indemind双目模组跑通ORB_SLAM3
首先感谢作者的贡献与开源。ORB_Slam3的介绍不做叙述,这里只对编译过程做出详细介绍。ORB_Slam3的介绍创新有时间在更新。
1.下载源码编译
ORB_SLAM3地址
纯视觉或加IMU跑Euroc数据集效果很好。
纯视觉跑或加IMU跑Indmeind双目模组表现也很好,注意在录制数据集的时候可以参考Euroc数据集初始的摆动,时间大概在20-30秒之间即可完成初始化。(ORB_SLAM3的对初始化的要求比较高)
//按照官方编译即可
//正常ROS编译
catkin_make
//编译ORB_SLAM3
cd ORB_SLAM3
chmod +x build.sh
./build.sh
这里对ROS进行编译会有一些错误。
2.ROS编译错误
1.类似与这种的错误
[rosbuild] rospack found package "ORB_SLAM2" at "", but the current directory is "/home/angelo/ORB_SLAM2/Examples/ROS/ORB_SLAM2". You should double-check your ROS_PACKAGE_PATH to ensure that packages are found in the correct precedence order.
将所有代码下的命名空间由ORB_SLAM2改为ORB_SLAM3
这样改完之后你还会遇到错误
2.某个.h文件的GeometricCamera.h、KannalaBrandt8.h、Pinhole.h文件找不到
1.在该.h文件添加正确的路径
2.其实这三个.h文件是在报错的.h文件的下一级目录,可以复制到上一级
别高兴,你应该还会遇到一类错误
3.boost文件找不到Makefile,这个主要是你编译了多个ORB_SLAM
解决办法Examples/ROS/ORB_SLAM3/Cmakelist.txt里面添加
target_link_libraries(Stereo boost_system boost_filesystem)
target_link_libraries(RGBD boost_system boost_filesystem)
target_link_libraries(Mono boost_system boost_filesystem)
注意一些topic问题,安装sdk,启动sdk看之前博客,这样你就可以顺利的跑起来SDK
注意实时双目或者单目,有时可以有时会卡死,建议录制成ros包
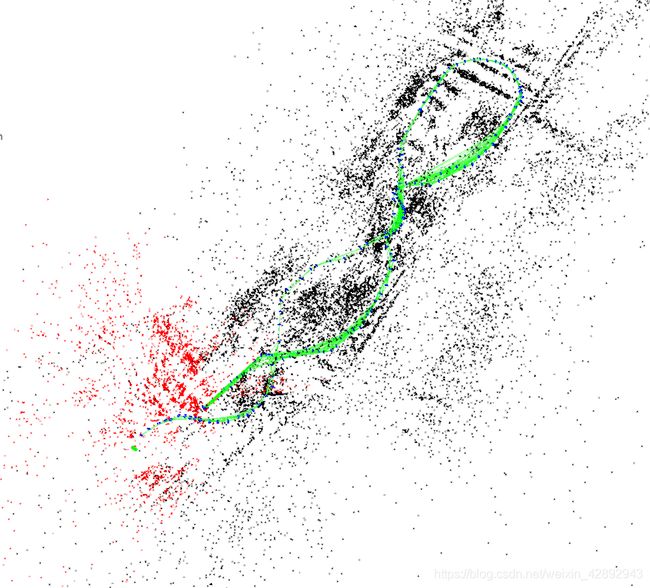
下面这图是纯双目,跑的自己录制的ros包,效果不错。

3.配置文件
标定Indmeind读取配置文件看上一篇文章,或者其他标定方法也可,直接对Euroc数据集的配置文件进行更改,即便参数设置为0,下面贴出一份我手里模组的配置文件
%YAML:1.0
#--------------------------------------------------------------------------------------------
# Camera Parameters. Adjust them!
#--------------------------------------------------------------------------------------------
Camera.type: "PinHole"
# Camera calibration and distortion parameters (OpenCV) (equal for both cameras after stereo rectification)
Camera.fx: 260.561
Camera.fy: 260.561
Camera.cx: 317.946
Camera.cy: 195.495
Camera.k1: 0.0
Camera.k2: 0.0
Camera.p1: 0.0
Camera.p2: 0.0
Camera.width: 640
Camera.height: 400
# Camera frames per second
Camera.fps: 25
# stereo baseline times fx
Camera.bf: 31.26732 #31.26732
# Color order of the images (0: BGR, 1: RGB. It is ignored if images are grayscale)
Camera.RGB: 1
# Close/Far threshold. Baseline times.
ThDepth: 35 # 35
# Transformation from camera 0 to body-frame (imu)
Tbc: !!opencv-matrix
rows: 4
cols: 4
dt: f
data: [-0.999977, -0.006624, -0.001162, 0.0060095, 0.006621, -0.999975, 0.002465, 2.61872e-05, -0.001178, 0.002458, 0.999996, -0.002,
0.0, 0.0, 0.0, 1.0]
# IMU noise
IMU.NoiseGyro: 1.000000000000000e-1 # 1.6968e-04
IMU.NoiseAcc: 1.000000000000000e-1 # 2.0000e-3
IMU.GyroWalk: 4.000000000000000e-3
IMU.AccWalk: 4.0000000000000000e-3 # 3.0000e-3
IMU.Frequency: 200
#--------------------------------------------------------------------------------------------
# Stereo Rectification. Only if you need to pre-rectify the images.
# Camera.fx, .fy, etc must be the same as in LEFT.P
#--------------------------------------------------------------------------------------------
LEFT.height: 400
LEFT.width: 640
LEFT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data:[-0., 0., 0.0, 0, 0.0]
LEFT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [245.96, 0, 318.423, 0, 245.793, 195.635, 0.0, 0.0, 1.0]
LEFT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [0.999988, 0.0036888, -0.00331281, -0.00368906, 0.999993, -7.24943e-05, 0.00331252, 8.47145e-05, 0.999995]
LEFT.Rf: !!opencv-matrix
rows: 3
cols: 3
dt: f
data: [1, 0,0,0,1, 0, 0,0,1]
LEFT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [260.561, 0, 317.946, 0, 0, 260.561, 195.495, 0, 0, 0, 1, 0]
RIGHT.height: 400
RIGHT.width: 640
RIGHT.D: !!opencv-matrix
rows: 1
cols: 5
dt: d
data:[-0., 0.0, -0.00, 0, 0.0]
RIGHT.K: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [245.861, 0, 312.777, 0, 246.03, 195.784, 0.0, 0.0, 1]
RIGHT.R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [0.999915, -0.00648092, -0.011273, 0.00648181, 0.999979, 4.20702e-05, 0.0112724, -0.000115136, 0.999936]
RIGHT.P: !!opencv-matrix
rows: 3
cols: 4
dt: d
data: [260.561, 0, 317.946 ,-31.161, 0 ,260.561, 195.495, 0, 0, 0, 1, 0]
#--------------------------------------------------------------------------------------------
# ORB Parameters
#--------------------------------------------------------------------------------------------
# ORB Extractor: Number of features per image
ORBextractor.nFeatures: 2400
# ORB Extractor: Scale factor between levels in the scale pyramid
ORBextractor.scaleFactor: 1.2
# ORB Extractor: Number of levels in the scale pyramid
ORBextractor.nLevels: 8
# ORB Extractor: Fast threshold
# Image is divided in a grid. At each cell FAST are extracted imposing a minimum response.
# Firstly we impose iniThFAST. If no corners are detected we impose a lower value minThFAST
# You can lower these values if your images have low contrast
ORBextractor.iniThFAST: 20
ORBextractor.minThFAST: 7
#--------------------------------------------------------------------------------------------
# Viewer Parameters
#--------------------------------------------------------------------------------------------
Viewer.KeyFrameSize: 0.05
Viewer.KeyFrameLineWidth: 1
Viewer.GraphLineWidth: 0.9
Viewer.PointSize:2
Viewer.CameraSize: 0.08
Viewer.CameraLineWidth: 3
Viewer.ViewpointX: 0
Viewer.ViewpointY: -0.7
Viewer.ViewpointZ: -1.8
Viewer.ViewpointF: 500
Indmeind跑ORB_SLAM3的VIO
首先,官方没有提供VIO的ROS接口,依赖于热心网友(大神)的贡献,现在贴出地址xiefei2929 作者也是做出了改进,读取速度更快
1.按照ORB_SLAM3正常编译即可
cd ORB_SLAM3
chmod +x build.sh
./build.sh
chmod +x build_ros.sh
./build_ros.sh
2.运行
首先ORB_SLAM3初始化要求比较高,先完成初始化,初始化完成之后,在进行一些其他的运动。而且实时的SDK会很卡,1秒10M,建议还是录制ros包完成测试。
(1)启动sdk
(2)启动ORB_SLAM3
Mono_inertial: rosrun ORB_SLAM3 Mono_inertial /YOUR_PATH/ORBvoc.bin /YOUR_PATH/EuRoC.yaml
Stereo_inertial: rosrun ORB_SLAM3 Stereo_inertial /YOUR_PATH/ORBvoc.bin /YOUR_PATH/EuRoC.yaml
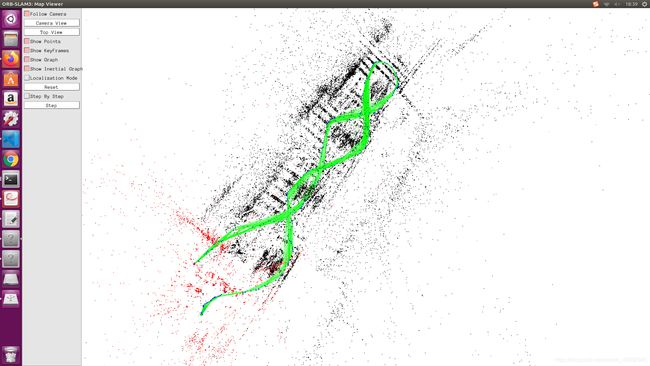
这里放上几张跑的自己采的数据集的图,三个数据集,效果还是不错的。




Indemind双目模组跑ORB_SLAM3实测
实测视频