S3C2440中的UART
一.S3C2440中的UART介绍
UART(universal asynchronous receive transmitter)通用异步收发器,用来收发串行数据,以全双工的形式进行通信,UART使用的电平标准是TTL/CMOS,一帧数据通常包含开始位、数据位、校验位、停止位,UART传输的双方要统一波特率。
S3C2440中有三个UART独立通道,功能类似,下面分块介绍一下UART比较重要的部分。
UART的用途一般有俩种:
1.作为与上位机的通信接口,打印调试信息
2.作为外设模块的驱动接口,连接驱动外设,比如:蓝牙、GPS等
1.1 电平匹配
ARM串口电平为TTL,要根据PC的匹配电平来选择电平转换芯片。
UART直接输出的电平是TTL电平,以前上位机PC端都有RS-232电平(九针接口),所以以前ARM与上位机连接需要TTL转RS-232电平的芯片。RS-232适合长距离传输。
现在,PC上基本没有RS-232接口了,取而代之的是USB接口,所以现在ARM与PC的UART通信都使用TTL转USB芯片了。
1.2 UART数据帧与波特率
一帧数据通常包含开始位、数据位、校验位、停止位。
开始位:UART空闲时,TxD数据线是高电平的(因此需要给相应引脚上拉引脚),将要发送数据时,TxD数据线会以拉低电平作为起始信号,所以“0”电平就相当于开始位。
数据位:数据位包含了要发送的信息,数据位的大小可以通过配置寄存器来确定,通常是8bit。
校验位:为了保证数据传输的准确性,有时会在数据位后面加上一个校验位,分为奇、偶校验,校验规则:数据位+校验位中为1的个数是奇数或者偶数。一般不用。
停止位:会给出一段持续的高电平作为停止信号,持续时间可以通过配置寄存器来设置,一般设置停止位的持续时间为1位长度。
最常用的数据帧格式为:8n1(意为:8位数据位,不使用校验位,停止位长度为一位)
波特率:每秒发送的bit(位)
1.3UART框图
框图如下:

UART发送数据的流程:CPU从内存中将数据取到FIFO,FIFO中的数据发送到移位器,由移位器逐位发送数据。
UART接收数据的流程:移位器逐位接收数据,将接收到的数据放在FIFO中,CPU将数据从FIFO中取到内存。
UART中FIFO深度为64Byte,不使用FIFO时,将数据放在接收/保持寄存器中(1Byte)。
数据发送、接收完成,可以利用中断进行处理,也可以不断查询寄存器标志位。
波特率由波特率发生器产生,涉及到时钟源和分频因子的选择
二.UART的配置
这里介绍一下最基本的UART配置,即:使用UART0、满足收发数据功能、不使用FIFO(使用1Byte的寄存器)、收发状态可以通过中断或查询标志位获知。
2.1 UART引脚的配置
S3C2440中UART0的引脚对应关系为:TxD:GPH2 RxD:GPH3
首先要将俩个引脚的模式设置为UART模式,寄存器配置如下:
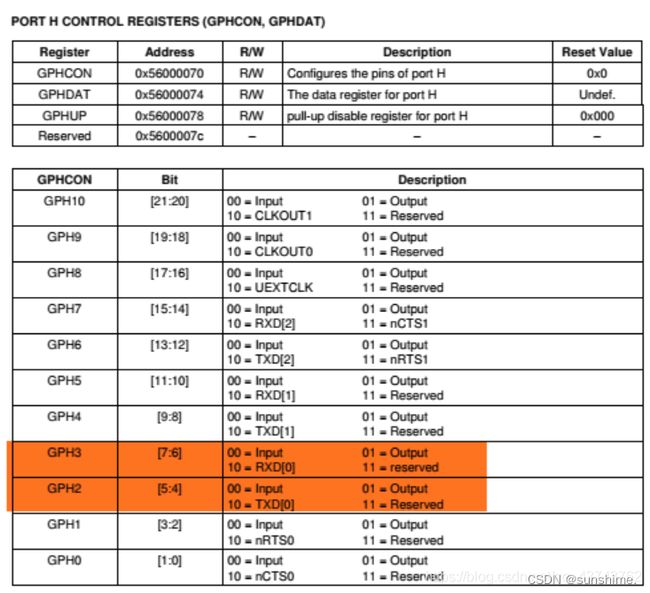
/* 设置引脚 */
//TxD0:GPH2 RxD0:GPH3
GPHCON &= ~((3<<4)|(3<<6));
GPHCON |= ((2<<4)|(2<<6));
由于数据线平时是高电平,所以要设置引脚的内部上拉。
我们要将内部上拉电阻与引脚连接,通过配置寄存器可以控制,上拉电阻与引脚的连接状态由GPHUP寄存器控制:

我们要使能GPH2、GPH3的内部上拉,将2、3位复位
/* 使能引脚的内部上拉 */
GPHUP &= ~( (1<<2)|(1<<3) );
2.2 波特率的配置
波特率计算如下:

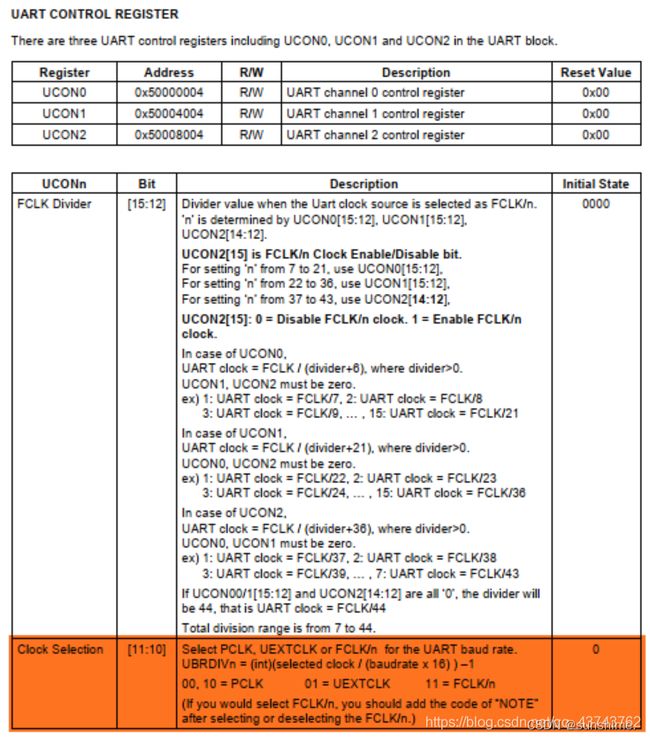
通过设置分频系数DIV、选择时钟源来配置波特率
UCON0寄存器可以选择时钟源:
一般默认PCLK为时钟源,所以不必专门配置时钟源。
UBRDIV寄存器负责分频因子设置:
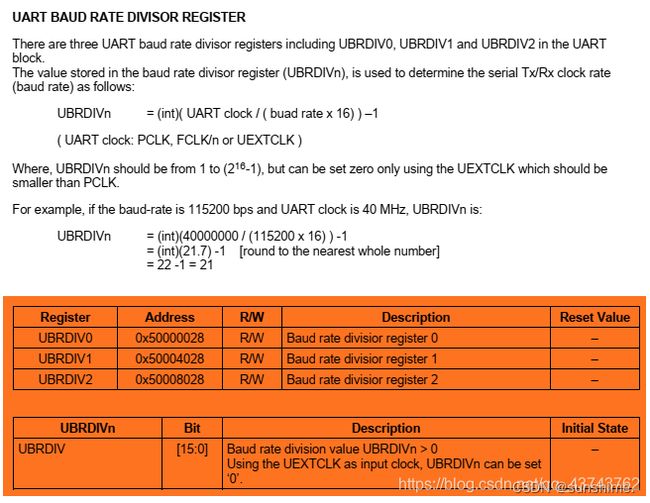
直接将分频因子写入寄存器即可:
/* 设置波特率 */
/* 波特率设置格公式:UBRDIVn = (int)( UART clock / ( buad rate x 16) ) –1 */
/* 实现波特率:115200 b/s 时钟源采用PCLK:50MHz 分频因子:26 (本来26.127,忽略误差可以) */
/* 默认PCLK:UCON0 &= ~(3<<10)*/
UBRDIV0 = 26;
2.3 数据帧的配置
数据帧的配置主要包括对:校验位、停止位、数据位的配置
ULCON0寄存器配置:

/* 设置数据格式 */
/* 数据帧格式:8n1 */
ULCON0 = 0x00000003;
2.4 收发模式配置
UCON0寄存器也用来配置RxD、TxD的模式:可以通过中断和查询寄存器标志位来获取收发的状态
默认选择时钟(PLCK=50MHz)、Rx、Tx模式(中断和查询)


/* 收发模式:中断+查询 */
UCON0 = 0x00000005;
收发状态的查询通过UTRSTAT0寄存器来确定:
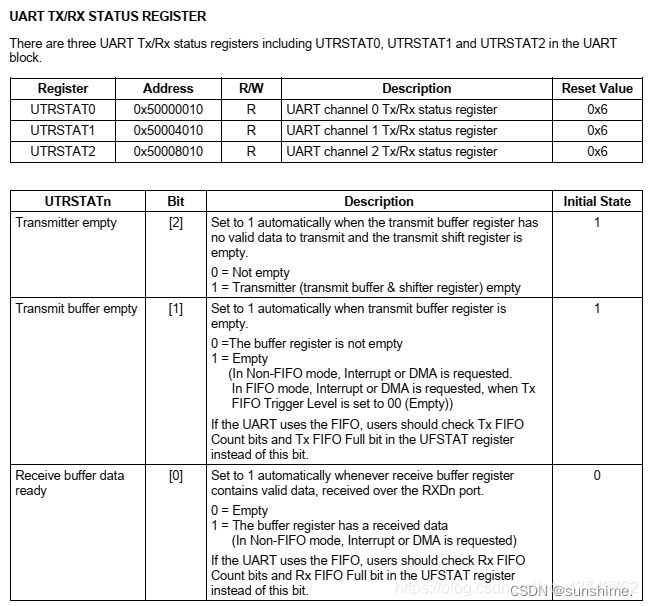
可以通过如下程序配合寄存器查询获取收发的状态:
/* 输出数据 */
int putchar( int c )
{
/* 等待传输数据寄存器空 */
while( !(UTRSTAT0 & (1<<2)) );
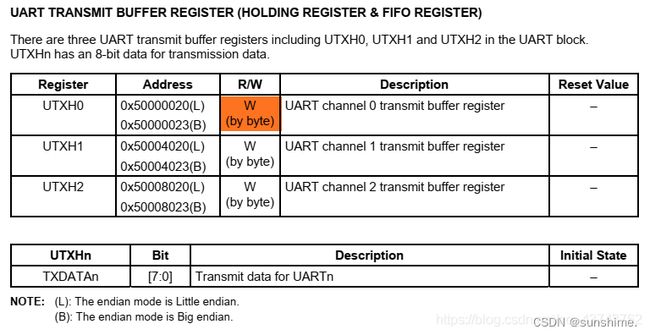
/* 不使用FIFO,对数据传输寄存器UTXH0直接写 */
UTXH0 = (unsigned char)c;
}
/* 接收数据 */
int getchar( void )
{
while( !(UTRSTAT0 & (1<<0)));
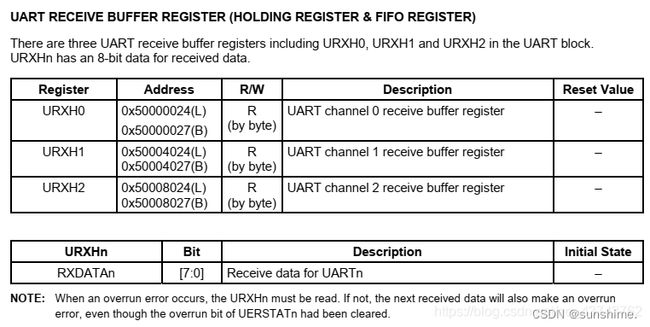
/* 接收数据寄存器URXH0 */
return URXH0;
}
2.5 收发数据寄存器
直接对寄存器进行读写就可以。
发送数据寄存器:
接收数据寄存器:
三.代码
话不多说,直接上代码,程序的框架是:main.c+uart.h+uart.c+start.S
main.c
#include "s3c2440_soc.h"
#include "uart.h"
int main(void)
{
unsigned char c;
uart0_init();
puts("Hello,word!\n\r");
while(1)
{
c = getchar();
if (c == '\r')
{
putchar('\n');
}
if (c == '\n')
{
putchar('\r');
}
putchar(c);
}
return 0;
}
uart.h
#ifndef _UART_H
#define _UART_H
void uart0_init();
int putchar(int c);
int getchar(void);
int puts(const char *s);
#endif
uart.c
#include "s3c2440_soc.h"
void uart0_init()
{
/*设置引脚用于串口*/
/*GPH2,3用于TxD0,RxD0*/
GPHCON &= ~((3<<4) | (3<<6));
GPHCON |= ((2<<4) | (2<<6));
GPFUP &= ~((1<<2) | (1<<3)); /*使能内部上拉*/
/*设置波特率*/
/*UBRDIVn = (int)(UART clock / (buad rate x 16)) - 1
*UART clock = 50M
*UBRDIVn = (int)(50000000 / (115200 x 16)) - 1
*/
UCON0 = 0x00000005;/*PCLK,中断/查询模式*/
UBRDIV0 = 26;
/*设置数据格式*/
ULCON0 = 0x00000003;/* 8n1:8个数据位,无校验位,1个停止位*/
/**/
}
int putchar(int c)
{
/*UTRSTAT0*/
/*UTXH0*/
while (!(UTRSTAT0 & (1<<2)));
UTXH0 = (unsigned char)c;
}
int getchar(void)
{
while (!(UTRSTAT0 & (1<<0)));
return URXH0;
}
int puts(const char *s)
{
while(*s)
{
putchar(*s);
s++;
}
}
start.S
.text
.global _start
_start:
/*关闭看门狗*/
ldr r0, =0x53000000
ldr r1, =0
str r1,[r0]
/*设置MPLL,FCLK:HCLK:PCLK= 400m : 100m : 50m*/
/*LOCKTIME(0x4c000000) = 0xFFFFFFFF*/
ldr r0, =0x4c000000
ldr r1, =0xFFFFFFFF
str r1, [r0]
/*CLKDIVN(0x4c000014) = 0x5, FCLK : HCLK :PCLK = 1:4:8*/
ldr r0, =0x4c000014
ldr r1, =0x5
str r1, [r0]
/*设置CPU工作于异步模式*/
mrc p15,0,r0,c1,c0,0
orr r0,r0,#0xc0000000 //R1_nF:OR:R1_iA
mcr p15,0,r0,c1,c0,0
/*设置MPLLCON(0x4c000004) = (92<<12) | (1<<4) | (1<<0)
*m = MDIV+8 = 92+8= 100
*p = PDIV+2 = 1+2 = 3
*s = SDIV = 1
*FCLK = 2*m*Fin/(p*2^s) = 2*100*12/(3*2^1)=400m
*/
ldr r0, =0x4c000004
ldr r1, =(92<<12) | (1<<4) | (1<<0)
str r1, [r0]
/*一旦设置PLL,就会锁定lock time直到PLL输出稳定
*然后CPU工作于新的频率FCLK
*/
/*设置内存 sp 栈*/
/*分辨是nor/nand启动
*写到0地址,再读出来
*如果得到0,表示0地址上的内容被修改了,它对应ram,这就是nand启动
*否则就是nor启动
*/
mov r1, #0
ldr r0, [r1] /*读出原来的值备份*/
str r1, [r1] /*0->[0]*/
ldr r2, [r1] /*r2=[0]*/
cmp r1, r2 /*r1==r2? 如果相等表示是NAND启动*/
ldr sp, =0x40000000+4096 /*先假设是nor启动*/
moveq sp, #4096 /*nand启动*/
streq r0, [r1] /*恢复原来的值*/
/*调用main*/
bl main
halt:
b halt
Makefile
all:
arm-linux-gcc -c -o uart.o uart.c
arm-linux-gcc -c -o main.o main.c
arm-linux-gcc -c -o start.o start.S
arm-linux-ld -Ttext 0 start.o uart.o main.o -o uart.elf
arm-linux-objcopy -O binary -S uart.elf uart.bin
arm-linux-objdump -D uart.elf > uart.dis
clean:
rm *.o *.elf *.bin *.dis