大恒MER-030工业相机+linux+opencv+clion-简易开发:让视频小窗跑出来
大恒工业相机usb2.0简易开发(一)
- 前言
-
- clion配置
- 主函数代码
- CTimeCounter.h
前言
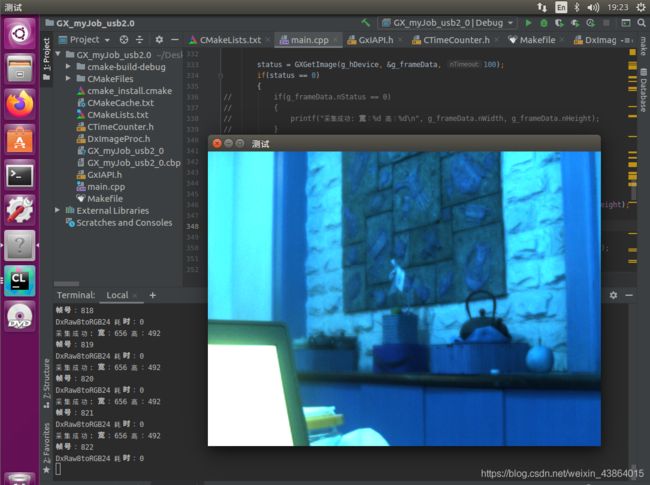
由于官方的sdk里的sample并没有详细写结合opencv开发的一些内容,在此做下入门记录,目标是在clion环境下,实时输出视频小窗。
另外,在使用过程中,发现GxRegisterCaptureCallback(注册回调函数)和GxUnregisterCaptureCallback(注销回调函数)不能用,不知道为什么,待解决,在之后的代码中我是用GxGetImage来写的
最终效果:
clion配置
官方的sdk中只有makefile的配置,可以根据此来改写成cmakelist配置,代码如下:
cmake_minimum_required(VERSION 3.5)
project(GX_myJob_usb2_0)
set(CMAKE_CXX_STANDARD 14)
# 相机要加的编译部分
set(CMAKE_EXE_LINKER_FLAGS
-I$(GENICAM_ROOT_V2_3)/library/CPP/include
-I$(DAHENG_ROOT)/sdk/include
)
# 寻找必要依赖库
find_package(OpenCV 4 REQUIRED)
# 设置头文件目录
include_directories(${OpenCV_INCLUDE_DIRS})
# 添加可执行文件以及链接
add_executable(GX_myJob_usb2_0 main.cpp)
target_link_libraries(GX_myJob_usb2_0 ${OpenCV_LIBS})
target_link_libraries(GX_myJob_usb2_0
-ldhgentl -lgxiapi -ldximageproc -lpthread
-L$(GENICAM_ROOT_V2_3)/bin/Linux64_x64
-L$(GENICAM_ROOT_V2_3)/bin/Linux64_x64/GenApi/Generic)
其中-ldhgentl -lgxiapi -ldximageproc -lpthread是必须加的,其他我删掉也没啥问题,但以防万一全加上了。
主函数代码
在下面 ProcGetImage 函数中写图像处理的部分即可,有很多函数在这里没用到(比如保存为PPM文件等),重点在 ProcGetImage中。
如果要用cmake的话,得把sdk里的DxImageProc.h和GxIAPI.h也给拉进项目里。
#include "GxIAPI.h"
#include CTimeCounter.h
#include在终端 cmake . 然后 make 就可以跑了