全卷积网络FCN详解
入门小菜鸟,希望像做笔记记录自己学的东西,也希望能帮助到同样入门的人,更希望大佬们帮忙纠错啦~侵权立删。
目录
一、FCN提出原因
二、FCN的网络结构分析
三、基本网络结构的源码分析(FCN-32s)
1、conv_relu函数——用于定义卷积层以及该层的激活函数层
2、max_pool函数——用于定义池化层
3、fcn函数——用于生成train.prototxt和val.prototxt
四、FCN跳级结构原理解析
五、FCN跳级结构源码分析
一、FCN提出原因
为了解决图像分割这种像素级别的问题。
图像分类是图像级别的,一般使用CNN为基础框架进行分类,但是CNN难以应用于图像分割
原因:
(1)CNN在进行卷积和池化过程中丢失了图像细节,即feature map size渐渐减小,因此不能很好指出物体的具体轮廓,指出每个像素具体属于哪个物体,从而无法做到精确的分割。
(2)一般CNN分类网络都会在最后加入一些全连接层,经过softmax后就可以获得类别概率。但是这个概率是一维的,就是说只能标识整个图片(或整个网格内对象)的类别,不能标识每个像素点的类别,所以全连接方法并不适用于图像分割
因此FCN应运而生
二、FCN的网络结构分析
传统的CNN网络结构如图的上部分,前面5层是卷积层,第6和7层都是长度为4096的一维向量,而第8层是长度为1000的一维向量(代表着1000种类别概率信息)

而FCN将第6,7,8层这些原本是全连接层替换成卷积层,卷积核的大小(通道数,宽,高)分别为(4096,7,7)、(4096,1,1)、(1000,1,1),最后输出的是和输入一样的尺寸,输出尺寸类别种类数+1(背景)
因为这样一来网络里全是卷积层,所以才有这么个名字——全卷积网络
并且FCN的输入可以是任意尺寸图像彩色图像
简单来说,FCN就是将CNN最后的全连接层换成卷积层,输出和输入一样尺寸的已经标好每个像素类别概率值的图
三、基本网络结构的源码分析(FCN-32s)
FCN源码地址:
https://github.com/shelhamer/fcn.berkeleyvision.org
我们以voc-fcn32s/net.py来阐述
1、conv_relu函数——用于定义卷积层以及该层的激活函数层
-
bottom:即该层的上一层的输出
-
nout:该卷积层输出的数目(即输出的特征图数目)
-
ks:卷积核的大小尺寸
-
stride:步长
-
pad:填充数
其中param的前部分是权重W的学习速率和衰减系数设置;
后部分是偏置b的学习速率(偏置不设置衰减系数)设置
def conv_relu(bottom, nout, ks=3, stride=1, pad=1):
conv = L.Convolution(bottom, kernel_size=ks, stride=stride,
num_output=nout, pad=pad,
param=[dict(lr_mult=1, decay_mult=1), dict(lr_mult=2, decay_mult=0)])
return conv, L.ReLU(conv, in_place=True)2、max_pool函数——用于定义池化层
全部采用最大池化法
def max_pool(bottom, ks=2, stride=2):
return L.Pooling(bottom, pool=P.Pooling.MAX, kernel_size=ks, stride=stride)3、fcn函数——用于生成train.prototxt和val.prototxt
前部分是为了进行参数的设定
#用于生成train.prototxt和val.prototxt的函数
#输入参数split为'train'或'val'
def fcn(split):
n = caffe.NetSpec() #使用pycaffe定义Net
#参数设定
pydata_params = dict(split=split, mean=(104.00699, 116.66877, 122.67892),
seed=1337)
if split == 'train':
pydata_params['sbdd_dir'] = '../data/sbdd/dataset'
pylayer = 'SBDDSegDataLayer'
else:
pydata_params['voc_dir'] = '../data/pascal/VOC2011'
pylayer = 'VOCSegDataLayer'接下来设置数据和标签的载入等等
其中的module是模型名称,一般对应自己所写的一个.py文件(用于实现自己想要的该层的功能,在这里对应voc_layers.py文件)
n.data, n.label = L.Python(module='voc_layers', layer=pylayer,
ntop=2, param_str=str(pydata_params))
网络结构组装
首先是前5层的卷积层
# the base net
n.conv1_1, n.relu1_1 = conv_relu(n.data, 64, pad=100)
n.conv1_2, n.relu1_2 = conv_relu(n.relu1_1, 64)
n.pool1 = max_pool(n.relu1_2)
n.conv2_1, n.relu2_1 = conv_relu(n.pool1, 128)
n.conv2_2, n.relu2_2 = conv_relu(n.relu2_1, 128)
n.pool2 = max_pool(n.relu2_2)
n.conv3_1, n.relu3_1 = conv_relu(n.pool2, 256)
n.conv3_2, n.relu3_2 = conv_relu(n.relu3_1, 256)
n.conv3_3, n.relu3_3 = conv_relu(n.relu3_2, 256)
n.pool3 = max_pool(n.relu3_3)
n.conv4_1, n.relu4_1 = conv_relu(n.pool3, 512)
n.conv4_2, n.relu4_2 = conv_relu(n.relu4_1, 512)
n.conv4_3, n.relu4_3 = conv_relu(n.relu4_2, 512)
n.pool4 = max_pool(n.relu4_3)
n.conv5_1, n.relu5_1 = conv_relu(n.pool4, 512)
n.conv5_2, n.relu5_2 = conv_relu(n.relu5_1, 512)
n.conv5_3, n.relu5_3 = conv_relu(n.relu5_2, 512)
n.pool5 = max_pool(n.relu5_3)可以看到第一个卷积层中conv1_1采用pad=100进行填充,这是为了防止输入图片过小(待会1/32的输入图片尺寸的特征图过小),同时这也是FCN可以输入任意大小图片进行训练和测试的原因,但这同时填充这么大会引入噪声
除了第一个卷积层中conv1_1采用pad=100进行填充外,conv1到conv5各卷积层的卷积核大小均为k=3,填充均为p=1(除了conv1_1),步长均为s=1(详见刚刚conv_relu函数的解释)
由公式
![]()
可知:在这样的条件下![]() ,即输入尺寸等于输出尺寸
,即输入尺寸等于输出尺寸
pool1-pool5各池化层的核大小均为k=2,填充均为p=0,步长均为s=2(详见刚刚max_pool函数的解释)
同样由上述公式可得出: ,即输出尺寸等于输入尺寸的1/2。
,即输出尺寸等于输入尺寸的1/2。
所以通过第一个卷积层时,输出尺寸先增加了198,然后减半;接下来的2,3,4,5依次减半,即最后在增加198的基础上缩小了32倍的尺寸
在这里最后的输出是heat map(热图:高维特征图),不是我们通常说的普通的feature map
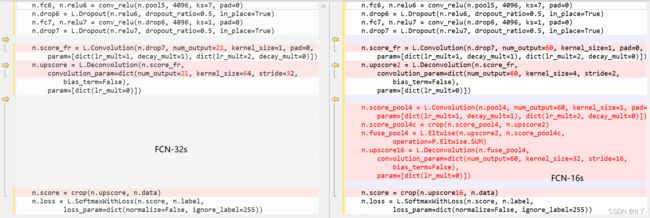
接下来是对应CNN的全连接层的替换
# fully conv
n.fc6, n.relu6 = conv_relu(n.pool5, 4096, ks=7, pad=0)
n.drop6 = L.Dropout(n.relu6, dropout_ratio=0.5, in_place=True)
n.fc7, n.relu7 = conv_relu(n.drop6, 4096, ks=1, pad=0)
n.drop7 = L.Dropout(n.relu7, dropout_ratio=0.5, in_place=True)
n.score_fr = L.Convolution(n.drop7, num_output=21, kernel_size=1, pad=0,
param=[dict(lr_mult=1, decay_mult=1), dict(lr_mult=2, decay_mult=0)])
n.upscore = L.Deconvolution(n.score_fr,
convolution_param=dict(num_output=21, kernel_size=64, stride=32,
bias_term=False),
param=[dict(lr_mult=0)])
n.score = crop(n.upscore, n.data)
n.loss = L.SoftmaxWithLoss(n.score, n.label,
loss_param=dict(normalize=False, ignore_label=255))
return n.to_proto()第6层:先经过一次卷积后![]() ,然后采用dropout技术(正则化,减弱过拟合,失活系数为0.5)[补充:dropout技术——随机让网络的某些节点不工作(输出置零),也不更新权重,但会保存下来,下次训练还会用,只是本次训练不参与bp传播,其他过程不变。]
,然后采用dropout技术(正则化,减弱过拟合,失活系数为0.5)[补充:dropout技术——随机让网络的某些节点不工作(输出置零),也不更新权重,但会保存下来,下次训练还会用,只是本次训练不参与bp传播,其他过程不变。]
第7层:同样经过一次卷积,但是输入尺寸和输出尺寸一致,再次使用dropout技术,失活系数还是0.5
第8层:score_fr层+上采样层
score_fr层:VOC数据集共21类,所以输出为21(如果是其他数据集,需要修改这个输出),不改变尺寸大小
上采样层:通过反卷积来进行上采样
由公式![]() 得
得![]()
score层:通过crop函数对上采样层进行裁剪,得到和data层一样的大小,即最终输出等于最初输入
总结:采用反卷积层对最后一个卷积层的feature map进行上采样, 让它恢复到输入图像相同的尺寸,从而对每个像素都产生了一个预测, 同时又保留了原始输入图像中的空间信息, 最后在上采样的特征图上进行逐像素分类。
四、FCN跳级结构原理解析
上述的网络结构其实已经可以实现图像分割了,但是直接将全卷积后的结果进行反卷积,得到的结果往往不太好看。
因此有了跳级结构——实现精细分割
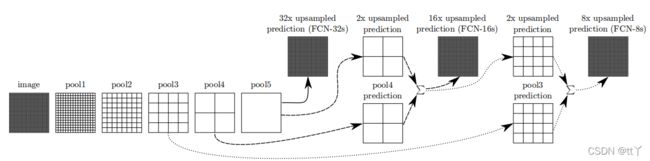
从上面的分析可以得到我们有1/32尺寸的heatMap(第5层卷积层的输出),1/16尺寸的featureMap(第4层卷积层的输出)和1/8尺寸的featureMap(第3层卷积层的输出)。1/32尺寸的heatMap进行上采样操作之后,不能很好地还原图像当中的特征(因为这样的操作还原的图片仅仅是conv5中的卷积核中的特征)。
所以在这里向前迭代:
对于FCN-16s,首先对pool5 的输出进行2倍上采样获得2x upsampled feature,再把pool4的输出进行卷积和2x upsampled feature逐点相加,然后对相加的feature进行16倍上采样,并softmax prediction,获得16x upsampled feature prediction。
FCN-8s等原理与以上相同
五、FCN跳级结构源码分析
这里以voc-fcn16s/net.py来阐述
其他的基本都和刚刚说的voc-fcn32s/net.py一样
以下是fully conv的代码
# fully conv
n.fc6, n.relu6 = conv_relu(n.pool5, 4096, ks=7, pad=0)
n.drop6 = L.Dropout(n.relu6, dropout_ratio=0.5, in_place=True)
n.fc7, n.relu7 = conv_relu(n.drop6, 4096, ks=1, pad=0)
n.drop7 = L.Dropout(n.relu7, dropout_ratio=0.5, in_place=True)
n.score_fr = L.Convolution(n.drop7, num_output=60, kernel_size=1, pad=0,
param=[dict(lr_mult=1, decay_mult=1), dict(lr_mult=2, decay_mult=0)])
n.upscore2 = L.Deconvolution(n.score_fr,
convolution_param=dict(num_output=60, kernel_size=4, stride=2,
bias_term=False),
param=[dict(lr_mult=0)])
n.score_pool4 = L.Convolution(n.pool4, num_output=60, kernel_size=1, pad=0,
param=[dict(lr_mult=1, decay_mult=1), dict(lr_mult=2, decay_mult=0)])
#对pool4的卷积
n.score_pool4c = crop(n.score_pool4, n.upscore2)
n.fuse_pool4 = L.Eltwise(n.upscore2, n.score_pool4c,
operation=P.Eltwise.SUM)
#逐点相加
n.upscore16 = L.Deconvolution(n.fuse_pool4,
convolution_param=dict(num_output=60, kernel_size=32, stride=16,
bias_term=False),
param=[dict(lr_mult=0)])
n.score = crop(n.upscore16, n.data)
n.loss = L.SoftmaxWithLoss(n.score, n.label,
loss_param=dict(normalize=False, ignore_label=255))
return n.to_proto()其中不同的对比
欢迎大家在评论区批评指正,谢谢~