无人驾驶关键技术
无人驾驶关键技术
1、前言
如果从谷歌无人车原型机开始算,无人驾驶概念从提出到逐步量产化,已经有11年了,中间经历过概念化、模式分级、技术路线图的百花齐放,核心零部件的量产化、无人驾驶平台等多个热点过程。中间诞生了很多的量产车型或实验车型及系统平台,例如特斯拉的“低成本感知+高性能计算“方案,谷歌的”数据驱动模式+硬件迭代“的方案,到最近华为的”机车操作系统+核心驱动感知“方案。所有这些都蕴含一些基本的关键技术,例如传感器、例如软件平台、例如算法。本文将对这些关键技术进行详细论述(博客部分为简化版,详细技术论述欢迎访问收费资源部分)。
开始前,我们先把常见的一些概念在这里罗列一下,首先声明,这些概念不是作者创造,而是已经存在与这方世界的,本文只是发现后,随手捡起来。无人驾驶是一个漫长的过程,需要不断的积累迭代,“于无声处惊雷,于多言出察微“。

概念1:自动驾驶的3大驱动力就是3类传感器:激光雷达传感器LiDAR、毫米波雷达、摄像头。
概念2:自动驾驶的3大阶段就是辅助驾驶阶段、半自动驾驶阶段、全自动价值阶段(这个很无聊,置Lx分级于何处?)。
概念3:自动驾驶的6个核心关键字就是(环境)传感、(导航)定位、(智能)避障、(模式)识别、(自动)控制、(多维)数传。
自动驾驶是汽车电子的“三横两纵“路线图的最后一步。两纵就是基础设施+车载平台。三三横包括车辆关键技术三横(环境感知技术、智能决策技术、控制执行技术),信息交互关键技术三横(V2X通信技术、云平台于大数据技术、信息安全技术),基础支撑技术三横(高精地图技术、高精定位技术、标准法规与评测技术)。
下面我们就围绕着这个三横展开。
2、车辆关键技术
如前所述,车辆关键技术包括环境感知技术、智能决策技术、控制执行技术。
环境感知技术就是自动驾驶的三大驱动力,即激光雷达传感器、毫米波雷达传感器、视觉传感器。
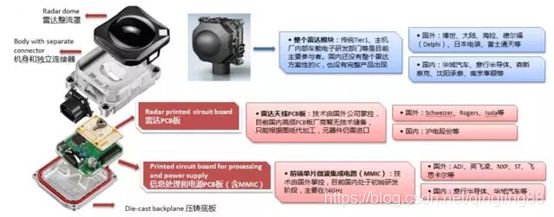
毫米波雷达的主流方向是24GHz和77GHz,24GHz主要应用于汽车后方,77GHz主要应用于前方和侧向。未来毫米波雷达会逐渐向77GHz频段(76-81GHz)统一,其中76-77GHz主要用于长距离毫米波雷达,77-81GHz主要用于中短距离毫米波雷达(已有欧盟、CEPT成员国、新加坡、美国FCC委员会、加拿大工业部等进行相关规划)。
前端单片微波集成电路MMIC和雷达天线高频PCB板是其核心组成部分
MMIC由国外公司掌控,特别是77GHz的MMIC,只掌握在英飞凌、ST、飞思卡尔等极少数国外芯片厂商手中,国内处于初始研发阶段,主要在24GHz雷达方面,华域汽车、杭州智波、芜湖森思泰克等企业在已有部分积累。
雷达天线高频PCB板技术也掌握在国外厂商手中,Schweizer占据全球30%市场份额,在77GHz方面优势明显,PCB使用的层压板材则主要由Rogers、Isola等公司提供。国内高频PCB板厂商暂无技术储备,根据图纸代加工,元器件仍需国外进口,沪电股份已就24GHz和77GHz高频雷达用PCB产品与Schweizer开展合作。

激光雷达是一种集激光、全球定位系统与惯性导航系统三大技术于一身的综合光探测与测量系统,其工作原理是通过透镜、激光发射及接收装置,基于激光飞行时间(TOF:time of fly)原理获得目标物体位置、移动速度等特征数据,并且获得的数据本身就是三维数据,不需要通过大量运算和处理才生成目标三维图像,激光测距有非常高的精度。所以,激光三维成像雷达是目前能获取大范围三维场景图像效率最高的传感器,也是目前能获取三维场景精度最高的传感器。
激光雷达组件主要包括激光器,传感器(收发器),光学镜片,如上图所示这套发射/接收组件和旋转镜面结合在一起,镜面不只反射二极管发出去的光,而且也能把反射回来的光再反射给接收器。通过旋转镜面,能够实现360度的视角。

根据激光雷达线目的不同,主要分为2D、2.5D(1,4,8线)和3D(16,32,64线)两类。前者主要探测目标位置和轮廓,后者可以形成环境性视觉感知。
Lidar系统测量3D空间中每个像素到发射器间的距离和方向,通过传感器创造出真实世界完整的3D模型。操作Lidar系统的基本方法是发射一束激光,然后测量光在物体表面反射而返回来的信号。Lidar模块接收到反射回来的信号所需的时间提供了一种直接测量Lidar系统与物体之间的距离的手段。关于物体的额外的信息,比如它的速率或材料成分,也可以通过测量反射回来的信号中的某些特性而得以确定,这些特性包括诱导多普勒频移(induced Doppler shift)。最后,通过操控发射出去的光,可以测量出环境中许多不同的点,从而创建出完整的3D模型。

国内公司在多线激光雷达上较国外高水平企业还有较大差距。国内的激光雷达产品多用于服务机器人、地形测绘、建筑测量等领域,但是国内企业尚未研制出可用于ADAS及无人驾驶系统的3D激光雷达产品,主要还是处在探索研发阶段。但是华为公司异军突起,在2020年开始推出系列的基于Mems的激光雷达传感器,朝着高性能、低成本、大批量方向迈进。


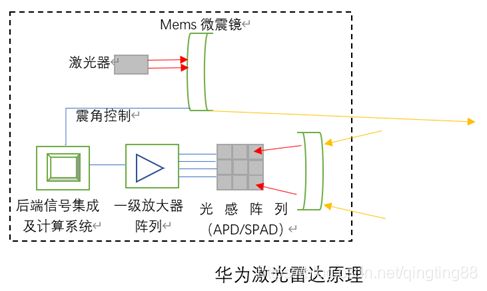
激光雷达按有无机械旋转部件分类,包括机械激光雷达和固态激光雷达。机械激光雷达带有控制激光发射角度的旋转部件,而固态激光雷达则依靠电子部件来控制激光发射角度,无需机械旋转部件。
车载视觉系统包括车载图像感光芯片、专用图像处理ISP芯片、车载光学镜头、车载视觉系统。
借由镜头采集图像后,由摄像头内的感光组件电路及控制组件对图像进行处理并转化为电脑能处理的数字信号,从而实现感知车辆周边的路况情况、前向碰撞预警、道偏移报警和行人检测等功能。
硬件方面,车载摄像头主要由CMOS镜头(包括lens和光感芯片等),芯片,其他物料(内存,sim卡,外壳)组成。
软件方面,以mobileye为例,主要体现在芯片的升级和处理平台的升级,工作频率从122Mhz提升到332Mhz,访问方式的改变使速率提升一倍,图像由640*480彩色像素提升为2048*2048(Input)和4096*2048(output)等。

摄像头目前的趋势越来越向传感器方向发展,能够自我计算。现在具有了高性能的激光雷达传感器,可以部分替代摄像头,但是摄像头作为感知层面的重要部分,任何的解决方案都是有他一席之地的。

3、基础支撑技术
基础支撑技术包括高精度定位技术、高精度地图、测量和测试技术。前两者是关联在一起的,有高精度定位,必然需要高精度地图。
目前主要的定位系统中美国的GPS应用最为广泛,技术也较为成熟,但目前民用的GPS定位精度远达不到无人车的需求,GPS官方民用定位精度“<10 m”,更高精度的GPS基本要依靠差分完成。差分的原理很简单:设置一个固定基站,固定基站校准位置,再将信号传递给车载设备,车载设备在接收到基站信号和GPS信号后差分获得。但是每一个基站的有效范围也就30 km。于是有很多技术要解决GPS精度不足的问题,如地图匹配技术等。
综合RTK是目前比较成熟的,很多的成熟模块支持且性价比很高。是以下三种方案的集合:
a)、它采用差分GPS,利用基站的准确定位信息校正GPS的误差,其精度可提高到厘米级;
b)、结合惯性传感器(IMU)、里程计(Odometry)及推算定位(Dead Reckoning)等技术,提高定位更新频率和准确度。即使在GPS信号受建筑物遮挡时,仍能短时间内提供相对准确的定位信息;
c)、在地下车库等无法接收到GPS信号的场景下,利用视觉SLAM、激光SLAM等定位手段,提供相对准确的定位信息。
高精地图是无人驾驶非常重要的部分。是自动驾驶的基础。
目前,地图提供商、传统车企、无人驾驶科技公司对高精度地图还没有统一的定义。相比于普通的导航地图,高精度地图体现在两方面:
a)高精度地图的绝对坐标精度更高;
b)高精度地图包含的道路交通信息更丰富,如可分为基础层、道路信息层、周围环境信息层和其他信息层,各层所包含的信息如下图所示。

平面地图精度再高也存在其缺陷性,包括导航深度,导航的可探测性。目前3D地图越来越多的替代平面地图。

由于3D地图的复杂性,业内就是否将这些虚拟展示称为“地图”发生了激烈争论。收集的信息可以被大致分为几个层次:人行道、建筑物以及树木的物理位置;道路标志和交通信号灯;以及自动驾驶汽车应该如何行驶,比如观察限速标志等。准确性问题也非常重要,即使是微小的变化也会产生影响,如每年移动几英寸的地质板块。3D地图的一大挑战是该行业的深度碎片化,对于高精3D地图没有明显的通用标准,各家公司也不会共享任何数据,因为他们认为这是重要的专有信息。

4、信息交互关键技术
信息交互关键技术包括V2X通信技术、云平台于大数据技术、信息安全技术。和C端数据一样。本文不做详细论述,读者可以参考相关资料。