【Pluto SDR】基于16QAM的数字通信系统
【Pluto SDR】基于16QAM的数字通信系统
- 引言
- 数字传输通信系统模型
-
- 数字调制模型
- 帧同步模型
- 相位同步模型
- 时间同步模型
- 基于SDR的数字通信系统
- 总结与分析
- 代码
引言
我是一名通信工程的一名大三学生。这是,第一次写小文章分享呢。以前包括现在也一直钦佩CSDN博客上一些大佬们的分享,所以这次拿着自己的期末报告来稍稍分享一下。如果以下分享有什么问题,大家可以在评论区指点哈~
上次实验我们实现了基于Pluto Radio的模拟通信系统的发送和接收,发现接收到的信号出现了畸变现象,例如高次谐波失真。是否有一种系统可以避免或忽略这种畸变现象呢?
同时,考虑到收发端存在一定的时延,接收端需要具备帧同步技术。
除此之外,还存在许多问题,接下来我们将对这些问题进行细致的讨论与解决。
数字传输通信系统模型
数字调制是现代通信的重要方法,它与模拟调制相比有许多优点。数字调制具有更好的抗干扰性能,更强的抗信道损耗,以及更好的安全性;数字传输系统中可以使用差错控制技术,支持复杂信号条件和处理技术,如信源编码、加密技术以及均衡等。
接下来的实验,我们将用数字调制系统代替模拟调制系统,进一步探究。
下图是数字通信系统模型的框图。信号从信源产生,经过信源编码、加密信道编码、数字调制,最后发送信号;在接收端也有类似的解调步骤。

由于无线电通信往往需要通过自由空间这一信道,所以基带传输无法实现,则需要进行第二种传输方式——将有用信号进过调制器,通过天线发射;将接收天线上接收到的信号通过解调器,即可得到恢复的信号,为信宿所用。
总的来说,数字通信系统的复杂度会比模拟通信系统要复杂,但是他们都在发送端和接收端具有对称性,且传输的目的就是提高信号的抗干扰能力。
对于数字传输系统,我们往往分为数字基带传输和数字带通传输。本次实验,我们利用Pluto Radio作为无线通信平台,自由空间作为信道,所以必须进行数字带通传输。
对于数字带通传输而言,其调制方式是首先需要考虑的,另外我们依然需要考虑数字信号传输过程中的码间串扰问题。
综上,我们需要建立以下子模型:数字调制模型、时间同步模型、相位补偿模型、帧同步模型等。
数字调制模型
针对我们本次实验的需求,利用现有模型——16进制正交幅度调制(16QAM)。
QAM是一种振幅和相位联合键控。在QAM体制中,信号的振幅和相位作为两个独立的参量同时收到调制。这种信号的一个码元可表示为
e k ( t ) = A k c o s ( ω c t + θ k ) , k T B ≤ t ≤ ( k + 1 ) T B e_k(t) = A_kcos(\omega_ct +\theta_k),kT_B\le t\le (k+1)T_B ek(t)=Akcos(ωct+θk),kTB≤t≤(k+1)TB
式中:k为整数。
将其展开为
e k ( t ) = X k c o s ω c t + Y k s i n ω c t e_k(t) = X_kcos\omega_ct + Y_ksin\omega_ct ek(t)=Xkcosωct+Yksinωct
其中令
X k = A k c o s θ k , Y k = − A k s i n θ k X_k=A_kcos\theta_k,Y_k=-A_ksin\theta_k Xk=Akcosθk,Yk=−Aksinθk
若 值仅可以取 π / 4 \pi/4 π/4和 − π / 4 -\pi/4 −π/4,则 仅可以取 A A A和 − A -A −A ,由此QAM信号成为了QPSK信号。因此,QPSK是一种最简单的QAM信号,典型的QAM信号有16进制的,记为16QAM。
对于16QAM映射即可通过上式(2),且设k=4。可利用其矢量图(即星座图)来观察映射分布情况。
帧同步模型
在数字时分多路通信系统中,为了能正确分离各路时隙信号,在发送端必须提供每帧的起始标记,在接收端检测并获取这一标志的过程称为帧同步。
帧同步有起止式同步法和插入特殊同步码组法两种。
起止式同步法:是在发送端利用特殊的码元编码规则使码组本身自带分组信息。
插入特殊同步码组法:是指在发送码元序列中插入用于帧同步的若干同步码.主要有集中式插入和间隔式插入两种。
这里我们对集中式插入特殊同步码组进行进一步讨论。集中式插入,也称为连贯式插入,要求帧同步特殊码组具有优良的自相关特性。常用的帧同步码组是巴克码。
巴克码序列是相位编码信号的一种,具有理想的自相关特性。巴克码的自相关函数的主峰和旁瓣均为底边宽度为2T的等腰三角形,主瓣峰值是旁瓣峰值的13倍。能够找到的巴克码只有7种,子脉冲长度分别为:2,3,4,5,7,11,13。已经证明巴克码的最大长度为13位。其中,它的自相关函数如下式:
R j = Σ 1 − 1 N − j X i X i + j R_j= \Sigma ^{N-j}_{1-1}X_iX_{i+j} Rj=Σ1−1N−jXiXi+j
相位同步模型
由于对于一帧数据而言,传输时间非常短,可以理解为一帧数据经过了一个恒参信道。所以,这一帧数据整体被相移了一个共同未知的相角,如下式。
S R ( t ) = H ( ϕ ) ( S ( t ) + n ( t ) ) S_R(t)=H(\phi)(S(t)+n(t)) SR(t)=H(ϕ)(S(t)+n(t))
其中
H ( ϕ ) = ∣ H ( ϕ ) ∣ e − j ϕ H(\phi)=|H(\phi)|e^{-j\phi} H(ϕ)=∣H(ϕ)∣e−jϕ
上式可以理解为一个已调信号S(t) 经过一个恒参信道,被加性噪声n(t) 污染,同时在传输过程中产生了相移和增益衰减。
所以,对于接收端而言,我们需要根据发送数据中的信息标志来相位估计,并达到相位补偿的目的。
在帧同步的模型中,我们已经提及了巴克码等帧同步码。它不仅可以用于帧同步,而且可以用于相偏补偿。
H ~ ( ϕ ) = H ( ϕ ) ( S ( t ) + n ( t ) ) S ( t ) = λ H ( ϕ ) = e − j ϕ ∣ H ~ ( ϕ ) ∣ \tilde{H}(\phi)=\frac{H(\phi)(S(t)+n(t))}{S(t)}=\lambda H(\phi)=e^{-j\phi}|\tilde{H}(\phi)| H~(ϕ)=S(t)H(ϕ)(S(t)+n(t))=λH(ϕ)=e−jϕ∣H~(ϕ)∣
通过同步码对应位相除并求和,即可得到相位信息。
时间同步模型
针对时间同步的问题,我们可以通过过采样来获得相对准确的符号信息。
当然当下也有一些通过差值运算来实现的同步模型,此处不作展开分析。
基于SDR的数字通信系统
首先,将要传输的数据,例如正弦波,模拟信号数字化,将其量化为4个电平,即16进制。
根据16QAM,将信号映射为复信号,如下图。

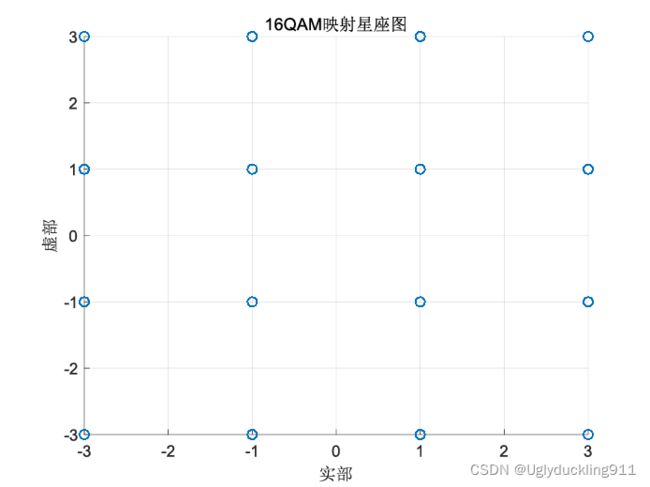
根据映射波形,实部和虚部都被量化为了四个电平;根据映射星座图,散点被均匀且聚类在了16个星座位置。无论是映射波形,还是映射星座图,均能反映出映射情况。
为了实现无码间串扰,需要在发射端和接收端设计根升余弦滤波器,将滤波器各项参数设置如下:
- 发送端根升余弦滤波器八倍过采样;
- 接收端根升余弦滤波器八倍下采样;两个滤波器的滚降系数均设为0.6;
以下为经过发送端根升余弦滤波器的信号如下。

上图发现,整体的序列长度被拉长,符合八倍过采样的设置;前面部分信号为同步码,此实验利用13位巴克码信号。
然后将数据运载在Pluto Radio,设置发送端和接收端的载频同步:
- 中心频率为2.5GHz;
- 基带采样速率为1MHz;
- 设置接收机中心频率增益来源为手动,并设置接收机增益为40dB,发射机增益为0dB;
- 设置接收机每次接收数据的采样数目,根据发送数据的点数而定;
选择接收端的增益平稳数据,对数据进行以下进一步分析。
首先进行根升余弦滤波器处理,实现无码间串扰。输出波形如下图波形

比对发送和接受前后波形,此时的波形依然存在较大失真现象。
由于我们依然位置一帧数据的起始位置。所以,我们需要根据同步码对信号进行定位处理。利用已知的巴克码序列与接收的信号进行相关性分析。

从上图发现,一段数据中存在一个尖峰脉冲,即该脉冲相关性极高,为一帧数据的起始位置。由此,我们可以利用该信息,提取出一帧数据。
除此之外,巴克码所在位置的相位偏移信息也可以通过同步码来进行估计。以下为巴克码所在位置的相位偏移情况。
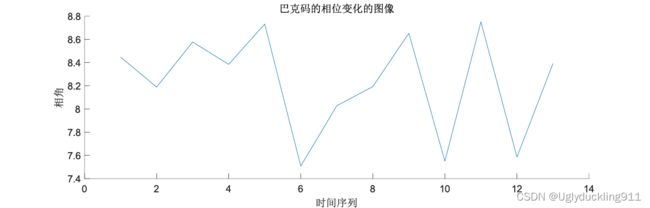
利用该相位偏移信息,可计算相位偏移角度为8.2301度。
由此可获得相位同步后的信号
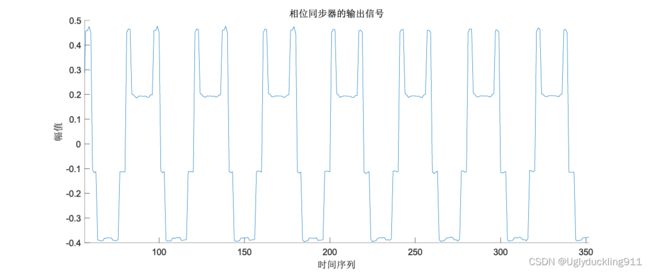
上图,明显发现此时的信号所呈现的4电平分别更加鲜明了。
由于信号在传输过程中出现了衰弱现象,所以我们需要对信号进行功率均衡,通过评估信号的平均功率,对其功率进行补偿处理。下图是功率补偿后的波形图和星座图。


功率均衡后整体波形幅度增大,但相对波形未有变化;星座图呈现较好的集群分布,且每个集群点均匀分布在各个星座点周围。
对以上信号16QAM反向映射,即可得到发送端调制信号。

解调后的信号与原始数据完全吻合,传递误码率为0。
总结与分析
综上实验,我们实现了一个基于Pluto Radio和MATLAB平台的简易数字通信系统。
本次实验实现的数字通信系统,包含了时间同步、相位同步、帧同步、功率均衡等一系列功能;传输误码率为0。
本次实验为将来学习数字通信系统有了更加深入的理解。
代码
以下是发送端的MATLAB代码
%%
%初始化
clc;clear;
tx = sdrtx('Pluto','CenterFrequency',2.5e+09,...
'BasebandSampleRate',1e6,...
'Gain',0);
rx = sdrrx('Pluto','CenterFrequency',2.5e+09,...
'OutputDataType','double',...
'BasebandSampleRate',1e6,...
'SamplesPerFrame',100000,...
'GainSource','Manual',...
'Gain',40);
sps = 8; %采样次数
k = 4; %电平数
M = 2^k; %调制阶数
normalize_factor = sqrt(10); %功率因子(手动
Rolloff = 0.6; %滚降系数
NormalizedLoopBandwidth = 0.1; %规范化的环路带宽
synWord = k*[1;1;1;1;1;-1;-1;1;1;-1;1;-1;1]; %校验码
waitWord = zeros(5,1); %收发间歇码
N = 0; %图像显示数目
%正弦信号
t = pi/20:pi/20:pi*40;
Data_sin = round((M-1)/2*sin(t)+(M-1)/2);
Data = Data_sin'; %有用信号
T = length(Data); %有用信号长度
%16QAM映射
mod = comm.RectangularQAMModulator(M); %16QAM调制器
Data_mod = mod(Data);
N = N+1;figure(N);hold on; %映射图像
plot(real(Data_mod),'b-');
plot(imag(Data_mod),'r:');
xlabel("时间序列");ylabel("幅值");
legend("实部","虚部");
title("16QAM映射波形图");
%星座图
N = N+1;figure(N);hold on;grid on %映射图像
scatter(real(Data_mod),imag(Data_mod));
xlabel("实部");ylabel("虚部");
title("16QAM映射星座图");
%合成一帧数据包
Tdata = [synWord;Data_mod;waitWord];
%根升余弦滤波器
txFilt = comm.RaisedCosineTransmitFilter(... %根升余弦滤波器对象
'OutputSamplesPerSymbol',sps,... %八倍采样的滤波器
'RolloffFactor',Rolloff);
Tdata_F = txFilt(Tdata);
% N = N+1;figure(N);hold on; %滤波后图像
% plot(real(Tdata_F),'b-');
% plot(imag(Tdata_F),'r:');
% xlabel("时间序列");ylabel("幅值");
% legend("实部","虚部");
% title("发送端根升余弦滤波器的输出信号");
%Pluto反复发送数据
tx.transmitRepeat(Tdata_F);
%接收数据
for k=1:3
rx();
end
Rx_Sig = rx();
% release(tx); %释放Pluto
%%
%根升余弦滤波器
rxFilt = comm.RaisedCosineReceiveFilter(...
'InputSamplesPerSymbol',sps,...
'DecimationFactor',1,...
'RolloffFactor',Rolloff);
Rx_Sig_F = rxFilt(Rx_Sig);
% N = N+1;figure(N);hold on; %滤波后图像
% plot(real(Rx_Sig_F),'b-');
% plot(imag(Rx_Sig_F),'r:');
% xlabel("时间序列");ylabel("幅值");
% legend("实部","虚部");
% title("接收端根升余弦滤波器的输出信号");
%%
%时间同步
symsync = comm.SymbolSynchronizer(... %这里的参数都可以调节
'TimingErrorDetector','Gardner (non-data-aided)',...
'NormalizedLoopBandwidth',NormalizedLoopBandwidth,...
'DampingFactor',2,...
'SamplesPerSymbol',sps);
Rx_Syn = step(symsync,Rx_Sig_F);
% N = N+1;figure(N);hold on; %时间同步后图像
% plot(real(Rx_Syn),'b-');
% plot(imag(Rx_Syn),'r:');
% xlabel("时间序列");ylabel("幅值");
% legend("实部","虚部");
% title("时间同步器的输出信号");
%%
%相位同步
data0 = synWord(end:-1:1);
data_conv = conv(data0,Rx_Syn );
% N = N+1;figure(N);hold on; %卷积和图像
% plot(abs(data_conv))
% xlabel("时间序列");
% ylabel("相关度")
% title("相关性分析图像")
[data_conv_max , data_conv_max_addr] = max(abs(data_conv(1:end-T))); %卷积最大值
data_addr = data_conv_max_addr(1) - length(data0); %同步字段的起始位置
phase_offset = Rx_Syn (data_addr + 1: data_addr+length(data0))./synWord; %同步字段的相位偏差
phi_offset = atan(imag(phase_offset)./real(phase_offset))/pi*180; %同步字段的相角偏差
if(mean(phi_offset)>0&mean(abs(phi_offset))>90*0.9) phi = abs(phi_offset);%相位临界处横跳矫正
else if(mean(phi_offset)<0&mean(abs(phi_offset))>90*0.9) phi = -abs(phi_offset);
else if(mean(abs(phi_offset))<90*0.9) phi = phi_offset;
end
end
end
% N = N+1;figure(N);hold on; %相位随之间变化的图像
% plot(phi);
% xlabel("时间序列");
% ylabel("相角")
% title("巴克码的相位变化的图像")
% e_phase = mean(phase_offset)/mean(abs(phase_offset));%利用e^jphi均值来纠正相位
e_phase = mean(real(phase_offset))/mean(abs(real(phase_offset)))*exp(1j*mean(phi*pi/180));%利用phi均值来纠正相位
R_Phase_Syn = 1/e_phase*Rx_Syn ...
(data_conv_max_addr(1) + 1:...
data_conv_max_addr(1)+ T); %挑选一帧数据并相位同步
N = N+1;figure(N);hold on; %相位同步后图像
plot(real(R_Phase_Syn));
xlabel("时间序列");ylabel("幅值");
title("相位同步器的输出信号");
%%
%绘制星座图
Rdata = R_Phase_Syn;
Rdata = normalize_factor*R_Phase_Syn./sqrt(mean(abs(R_Phase_Syn).^2)); %功率归一化方式一:利用所有有用信号的绝对值均值,无误码率100%
% FrameHead = Rx_Syn (data_addr + 1: data_addr+length(data0));
% normalize_factor = sqrt(mean(imag(FrameHead).^2+real(FrameHead).^2)/mean(synWord.^2));%功率归一化因子
% normalize_factor = mean(abs(FrameHead.*synWord))/mean(abs(synWord.*synWord));
% Rdata = 1/(normalize_factor)*Rdata; %功率归一化方法二:利用巴克码功率变化比来调节,无误码率90%多,星座图偏大
cd = comm.ConstellationDiagram(...
'ReferenceConstellation',constellation(mod), ...
'XLimits',[-5 5],'YLimits',[-5 5]);
% cd(Rdata); %星座图
% %星座图
% N = N+1;figure(N);hold on;grid on %映射图像
% scatter(real(Rdata),imag(Rdata));
% xlabel("实部");ylabel("虚部");
% title("功率均衡后星座图");
% N = N+1;figure(N);hold on; %时间同步后的一帧数据图像
% plot(real(Rdata),'b-');
% plot(imag(Rdata),'r:');
% legend("实部","虚部");
% title("功率均衡后的一帧数据");
%%
%解调
hDemod = comm.RectangularQAMDemodulator('ModulationOrder',M);
Rdemod = hDemod(Rdata);
percentage = length(find(Rdemod==Data))/length(Data)*100;
fprintf("正确率 %.2f %%",percentage);
N = N+1;figure(N);hold on; %解调后数据图像
plot(real(Rdemod),'b','linewidth',2);
plot(real(Data),'r');
legend("接收","发送");
title("解调后数据与原始数据比较");
% save tmp3.mat Tdata R_Phase_Syn Rdata