基于pcl的点云iss特征点提取
\quad 点云ISS特征提取:
文章:《Intrinsic shape signatures: A shape descriptor for 3D object recognition》
\qquad 内部形状描述子(ISS)是一种表示立体几何形状的方法,该算法含有丰富的几何特征信息。
算法流程:
\qquad 设点云数据有M个点,其任意一点 p i p_i pi坐标为 ( x i , y i , z i ) (x_i,y_i,z_i) (xi,yi,zi), i = 0 , 1 , . . . , M − 1 i=0,1,...,M-1 i=0,1,...,M−1
(1)对点云上的每个点 p i p_i pi定义一个局部坐标系,并给定每一个点一个搜索半径 r f r a m e r_{frame} rframe。
(2)查询点云数据中每个点 p i p_i pi在半径 r f r a m e r_{frame} rframe周围内的所有点,并计算其权值。 ω i j = 1 / ∣ p i − p j ∣ , ∣ p i − p j ∣ < r frama \omega_{i j}=1 /\left|p_{i}-p_{j}\right|,\left|p_{i}-p_{j}\right|
cov ( p i ) = ∑ ∣ p i − p j ∣ < r f fnux ω i j ( p i − p j ) ( p i − p j ) T / ∑ ∣ p i − p j ∣ < r franx ω i j \operatorname{cov}\left(p_{i}\right)=\sum_{\left|p_{i}-p_{j}\right|
(5)设置阈值 ε 1 \varepsilon_{1} ε1和 ε 2 \varepsilon_{2} ε2,满足下式条件的点视为ISS特征点。
λ i 2 / λ i 1 ≤ ε 1 , λ i 3 / λ i 2 ≤ ε 2 \lambda_{ i }^{2} / \lambda_{i}^{1} \leq \varepsilon_{1}, \lambda_{ i }^{3} / \lambda_{i}^{2} \leq \varepsilon_{2} λi2/λi1≤ε1,λi3/λi2≤ε2
\quad PCL实现
\qquad 程序:
#include CMakeLists.txt:
cmake_minimum_required(VERSION 2.8 FATAL_ERROR)
project(iss)
find_package(PCL REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable (iss iss.cpp)
target_link_libraries (iss ${PCL_LIBRARIES})
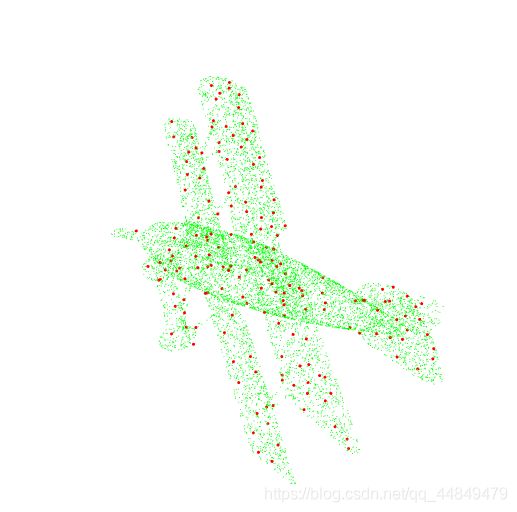
实现效果: