KUKA - KRL
KUKA
文章目录
- KUKA
- 一、编程基础
-
- 1.基本文件
- 2.数据类型
- 3.基本运算
- 4.Struct
- 5.常见SYS变量
- 6.变量申请
- 总结:
一、编程基础
1.基本文件
KRL-KUKA Robot Language (库卡机器人编程语言);
包含SRC和DAT两类文件,类似于C语言中的.C和.H
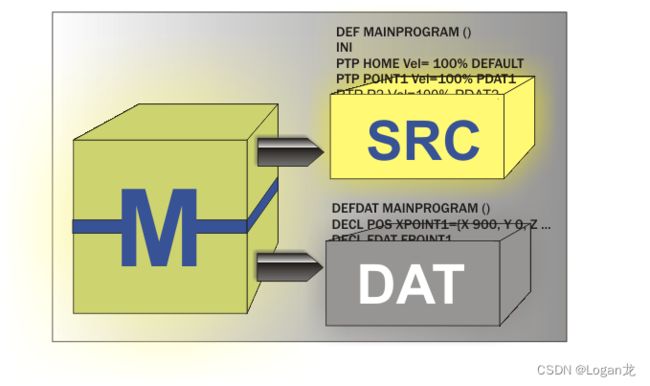
| 文件类型 | 作用 |
|---|---|
| SRC | 含有源代码 、函数 |
| DAT | 含有固定数据和点坐标 |
2.数据类型
注意:KRL 中的名称允许含有字母 (A - Z)、数字 (0 - 9) 以及特殊字符 “_” 和"$"。
| 数据类型 | 说明 |
|---|---|
| BOOL | “ 是 ” / “ 否 ” |
| CAHR | CHAR 数组来实现一个字符串 |
| REAL | 实数,为了避免四舍五入出错的运算结果 |
| INT | 整数,用于计数循环或件数计数器的经典计数变量 |
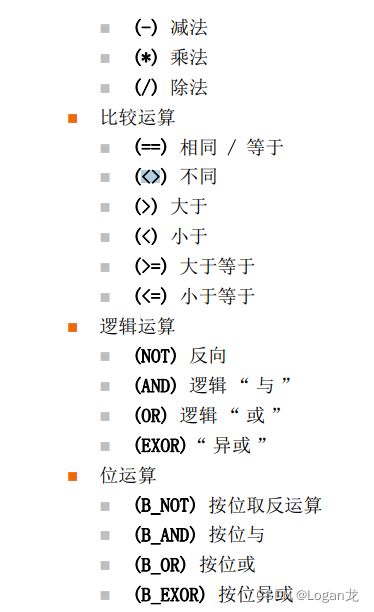
3.基本运算
说明:注意 "< >" 是不相等的意思,实际使用较多;
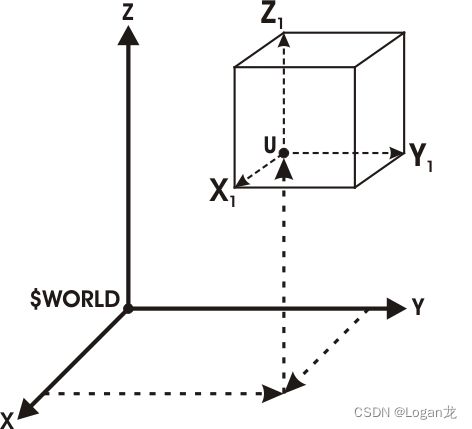
4.Struct
1. 笛卡尔坐标:
X/Y/Z :为三维坐标点 (mm);
A/B/C:为绕X/Y/Z的旋转角度(°);
2. 轴坐标系:
A1/A2/A3/A4/A5/A6:为6轴的转动角度(°);
AXIS:// 轴坐标(°)
STRUC AXIS REAL A1, A2, A3, A4, A5, A6
E6AXIS://轴坐标(°)+带外部轴信息
STRUC E6AXIS REAL A1, A2, A3, A4, A5, A6, E1, E2, E3, E4,E5, E6
FRAME:// 笛卡尔基坐标(mm)
STRUC FRAME REAL X, Y, Z, A, B, C
POS: //笛卡尔位置坐标(mm)
STRUC POS REAL X, Y, Z, A, B, C
E6POS:// 笛卡尔位置坐标(mm) + 带外部轴信息
STRUC E6POS REAL X, Y, Z, A, B, C, E1, E2, E3, E4, E5, E6 INT S,T
5.常见SYS变量
常见系统预定义参数如下,基本编程中都会使用到:
$ACC
CP: 轨迹加速度
ORI1: 回转加速度
ORI2: 旋转加速度
$ACC_AXIS
加速 1~100%
$BASE
X、 Y、 Z:原点沿着轴的推移, mm
A、 B、 C:轴角度的旋转, °
$LOAD={M 质量 , CM 重心 , J 惯性 }
Kg
X、 Y、 Z:相对于法兰的重心位置
A、 B、 C:主惯性轴相对于法兰的姿态
X、 Y、 Z:围绕坐标系轴的质量转动惯量
$TOOL
X、 Y、 Z:原点沿着轴的推移,mm
A、 B、 C:轴角度的旋转,单位:[°]
$VEL
TCP 预进中的速度
$VEL_AXIS
A1...A6轴的速度
$OV_JOG
手动倍率,机器人手动倍率是手动移动机器人(不执行程序)时的速度比。AUTO时无效。
$OV_PRO
执行程序时的速度比。 $ OV_PRO为0时,机器人将处于停止状态。T1时无效。
$APO.CDIS:逼近距离
$VEL.CP:TCP速度
6.变量申请
- 在SRC中定义变量: INI后函数主体使用;
DEF MY_PROG ( )
DECL INT counter
DECL REAL price
DECL BOOL error
DECL CHAR symbol
INI
...
END
- 在DAT中定义变量:被自己的SRC文件使用;
DEFDAT MY_PROG
EXTERNAL DECLARATIONS
DECL INT counter
DECL REAL price
DECL BOOL error
DECL CHAR symbol
...
ENDDAT
- 在DAT定义全局变量(慎重,考虑到冲突访问)
DEFDAT MY_PROG PUBLIC
EXTERNAL DECLARATIONS
DECL GLOBAL INT counter
DECL GLOBAL REAL price
DECL GLOBAL BOOL error
DECL GLOBAL CHAR symbol
...
ENDDAT
总结:
KUKA日常标定测试需要使用到的语法/ 备忘1.
`