Opencv(C++)笔记--实现自定义线性滤波
目录
1--利用cv::filter2D实现自定义线性滤波
1-1--OpenCV API
1-2--常用算子
1-3--使用不同的算子进行滤波
1--利用cv::filter2D实现自定义线性滤波
1-1--OpenCV API
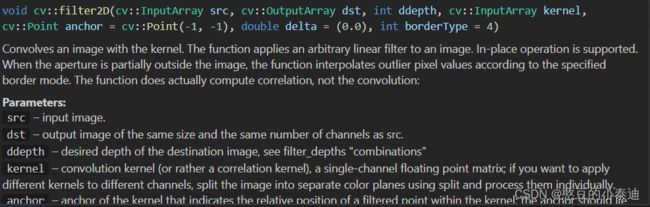
通过定义不同的 kernel 算子,实现自定义线性滤波;
1-2--常用算子
① Robot算子

② Sobel算子
③ Laplace算子
1-3--使用不同的算子进行滤波
#include
# include
int main(int argc, char** argv){
cv::Mat src;
src = cv::imread("C:/Users/Liujinfu/Desktop/opencv_bilibili/test1.jpg");
if (src.empty()){
printf("could not load image..\n");
return -1;
}
cv::imshow("input", src);
cv::Mat dst1, dst2, dst3, dst4, dst5;
// Robert算子 主对角方向
cv::Mat kernel1 = (cv::Mat_(2, 2) << 1, 0, 0, -1);
cv::filter2D(src, dst1, -1, kernel1, cv::Point(-1, -1));
cv::imshow("dst1", dst1);
// Robert算子 次对角方向
cv::Mat kernel2 = (cv::Mat_(2, 2) << 0, 1, -1, 0);
cv::filter2D(src, dst2, -1, kernel2, cv::Point(-1, -1));
cv::imshow("dst2", dst2);
// Sobel算子 x方向
cv::Mat kernel3 = (cv::Mat_(3, 3) << -1, 0, 1, -2, 0, 2, -1, 0, 1);
cv::filter2D(src, dst3, -1, kernel3, cv::Point(-1, -1));
cv::imshow("dst3", dst3);
// Sobel算子 y方向
cv::Mat kernel4 = (cv::Mat_(3, 3) << -1, -2, -1, 0, 0, 0, 1, 2, 1);
cv::filter2D(src, dst4, -1, kernel4, cv::Point(-1, -1));
cv::imshow("dst4", dst4);
// 拉普拉斯算子
cv::Mat kernel5 = (cv::Mat_(3, 3) << 0, -1, 0, -1, 4, -1, 0, -1, 0);
cv::filter2D(src, dst5, -1, kernel5, cv::Point(-1, -1));
cv::imshow("dst5", dst5);
cv::waitKey(0);
return 0;
}