计算机视觉在生物的应用,生物视觉仿生在计算机视觉中的应用研究
生物视觉仿生在计算机视觉中的应用研究

1158 计算机应用研究 第26卷
色地完成视觉检测任务,尤其对运动的检测更是如此。蝇作为具有神经重叠形复眼且能快速运动的双翅目昆虫,能高效、实时地对运动环境进行感知和评估,目前还没有一个人工系统能与之相比。
蝇的复眼是由3000多只小眼组成的两个半球对称地分布在蝇头部的两侧,半球中的每一只小眼都像一个成像制导中的探测器,具有一定的探测角度,但半球中的小眼组合起来就可以探测半球视场中的目标,而左右两个半球合起来便可进行全方位的目标探测。
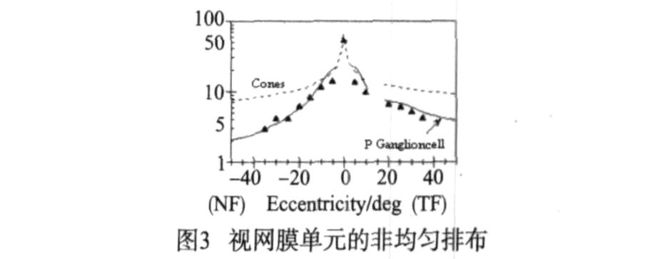
蝇具有卓越的视觉系统和飞行控制系统,能检测相对于环境的运动,不断地校正以稳定其飞行路线,同时能够对目标定位,并具有跟踪或截击正在飞行的目标的能力。它们可以识别一些特定视觉图形,甚至可以区别视觉的质地或分辨图像背景。蝇的这些特殊功能是由两个独立的并行通道完成的,即大场景系统和小场景系统。大场景系统在视网膜图像的低频偏移情况下产生扭矩响应,所产生的扭矩用于消除在飞行过程中因空气扰动和自身飞行动力失衡等原因所形成的意外偏差,减少相对于环境的旋转,稳定其飞行路线;而小场景系统则在视网膜图像相对高的振动频率下对小的目标产生响应,,360°的视场角,景系统提供了一条途径,也为多目标跟踪研究提供了一个很好的参考模式,可以较好地解决目标跟踪研究中的视场、分辨率和实时性三者之间有效性的矛盾问题。图3给出了视网膜单元的非均匀排布
。
成像制导,包括红外、可见光和SAR图像制导,是目前公认的先进无人自主式武器的精确制导方式。成像制导的目标识别方法主要是将武器导引头的实时观测图像与所存储的目标图像进行相似度分析,检测判别出所要攻击的目标,是一个极其复杂的过程。导引头所存储的目标图像往往是用侦察卫星等其他工具所拍摄的图像,、旋转角度、距离、,,影响了。
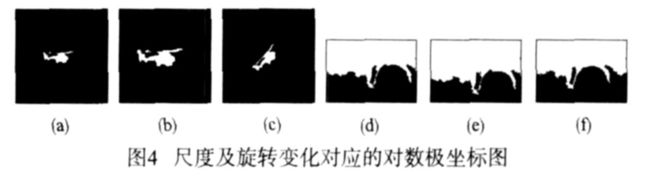
,发现目标的尺度与向和纵向的平移[4]。就目标边缘图而言,尺度与旋转的影响只是目标边缘曲线的平移,目标边缘曲线形状并不改变,而这种平移量通过移位匹配算法可简便得到。有效利用对数极坐标变换的这种图像尺寸和角度不变性为解决成像制导中的目标识别提供了一种有效的算法。图4分别给出了目标存在尺
度及旋转变化情况下的对数极坐标变换图。其中:(a)为原始的目标图像;(b)为(a)中的目标放大1.5倍后的图像;(c)为(a)中的目标逆时针旋转45°的图像;(d)~(f)分别为与(a)~(c)对应的对数极坐标变换图
。
。大场景系统获取周边大环境区域的环境特征,控制其飞行路线;而小场景系统完成目标识别与跟踪任务。但在进一步研究时发现,在同一个导引头中同时建立大场景系统和小场景系统是比较困难的
[2]
。
人眼仿生技术
视觉系统完成了人类70%以上的信息获取,是人类最重要的感觉器官。人的视觉系统包括光学通道和神经通道,在人对周围事物的感知中也起到传感器的作用。人视觉系统是一个并行的多通道系统,不同的通道分别承担着不同的信息传输和处理功能。人视觉系统这种复杂的并行结构,在基于特定目标的视觉算法及复杂的多通道特征并行计算方面给出了一个新的启发,可以考虑将这种多通道特征用于多波段成像的智能化信息处理,其典型的应用是双波段成像的图像融合。
此外,在导弹成像制导方面,人眼视觉仿生也有广泛的应用[3],如光电目标信息检测、估计与跟踪技术等,探索将人眼视觉原理中的一些机制应用于图像信息的获取、检测、运动估计和目标跟踪。目的是提高图像数据处理的效率和质量,改善成像制导导引头在目标检测、运动估计和跟踪中的准确性和抗干扰能力。
人眼视网膜中的感受器单元及节细胞的分布是非均匀的,在窝区高度密集而周边稀疏,因而视觉信息的获取也是非均匀的;同时,视网膜与皮层间的映射也呈现非均匀特征,使得视觉信息的处理也具有非均匀性。这种空间非均匀信息的获取与处理方式被称为空间变分辨率机制。配合注意力机制,通过有意识的眼动,人眼总把窝区对准感兴趣的区域。这就使得人眼在具有广阔视野的同时又具有局部高分辨率,可以使人在对感兴趣的目标保持高分辨率的同时又能对视野的其他部分保持警戒。这既为解决同一导引头中同时建立大场景系统和小场
可以看出,目标尺度变化相当于映射变换图上下移动数个单位,旋转变化相当于映射变化图左右移动数个单位,因而利用对数极坐标变换的尺度和旋转不变性可提高目标识别的精度并缩短识别时间。
猫视觉皮层仿生
哺乳动物的视觉信息处理过程已经进化到高度完美的阶
段。脉冲耦合神经网络(PCNN)是由Eckhorn为解释猫大脑视觉皮层中实验所观察到的与特征有关的神经元同步行为现象而提出的[5]。PCNN不同于传统的人工神经网络,它是一种单层神经网络模型,适合于实时图像处理环境。
PCNN是由若干个PCNN的神经元互连所构成的反馈型
网络,每个神经元由三个部分组成,即接收、调制和脉冲产生,如图5所示。可以将其解释为:PCNN神经元接收反馈输入Fij
[n]和链接输入Lij[n];然后在其内部神经元活动系统形成内
部活动项Uij[n];当Uij[n]大于动态门限Tij[n]时,PCNN产生输出时序脉冲Yij[n]。