image 第二次使用就出错是怎么回事_智能车竞赛——使用vscode开发四轮摄像头组程序...
sudo add-apt-repository ppa:ubuntu-desktop/ubuntu-makesudo apt-get updatesudo apt-get install ubuntu-makeumake ide visual-studio-codecd ~/.local/share/umake/ide/visual-studio-code/bin./code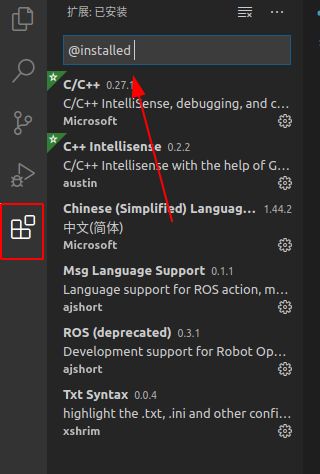
- roscpp:ros的cpp支持库
- geometry_msgs:通用消息类型
- cv_bridge:图片转换用
- image_transport:图片转换用
- opencv:图片处理库

set(OpenCV_DIR /opt/ros/kinetic/share/OpenCV-3.3.1-dev/)find_package(catkin REQUIRED COMPONENTS gazebo_ros geometry_msgs OpenCV roscpp cv_bridge image_transport)包含路径中加上opencv的路径:
include_directories( ${catkin_INCLUDE_DIRS} ${OpenCV_INCLUDE_DIRS})add_executable(findLine src/findLine.cpp)target_link_libraries(findline${catkin_LIBRARIES}${OpenCV_LiBRARIES})add_dependencies(findLine findLine_tutorials_generate_messages_cpp)修改同目录下的package.xml文件,加上新增的依赖:geometry_msgsbuild_depend> roscppbuild_depend> image_transportbuild_depend> cv_bridgebuild_depend> trajectory_msgsbuild_depend> geometry_msgsrun_depend> roscpprun_depend> image_transportrun_depend> cv_bridgerun_depend> trajectory_msgsrun_depend> #include "ackermann_msgs/AckermannDrive.h"#include "ackermann_msgs/AckermannDriveStamped.h"void Follower::speed_contrl(float speed_car,float angluar_car){ ackermann_msgs::AckermannDriveStamped ack; ack.drive.speed = speed_car; ack.drive.steering_angle = angluar_car; cmdpub.publish(ack);}这里我们对比之前的py代码,发现阿克曼的消息类型是AckermannDriveStamped,他是在ackermann_msgs类的,用vscode的代码补全提示就可以很方便的找到具体的成员:
 6.3 阿克曼消息发布的节点创建:
6.3 阿克曼消息发布的节点创建:
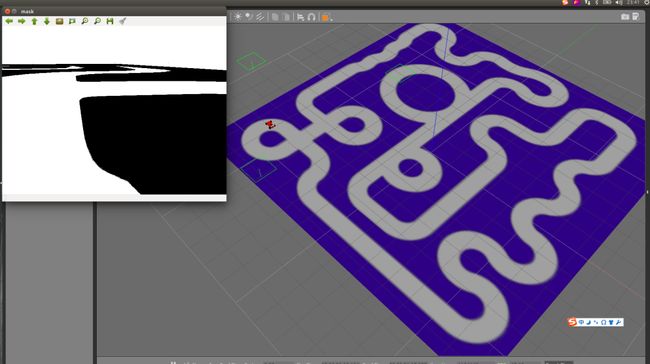
cmdpub = node.advertise<:ackermanndrivestamped>("/vesc/low_level/ackermann_cmd_mux/input/teleop", 10, true);void Follower::image_callback(const sensor_msgs::ImageConstPtr& msg){ cv_bridge::CvImagePtr cv_ptr; try { cv_ptr = cv_bridge::toCvCopy(msg, sensor_msgs::image_encodings::BGR8); } catch(cv_bridge::Exception& e) { ROS_ERROR("cv_bridge exception: %s", e.what()); return; } Mat hsv = cv_ptr->image.clone(); Mat mask = cv_ptr->image.clone(); cvtColor(cv_ptr->image, hsv, COLOR_BGR2HSV); double low_H = 0; double low_S = 0; double low_V = 100; double high_H = 180; double high_S = 30; double high_V = 255; inRange(hsv, Scalar(low_H, low_S, low_V), Scalar(high_H, high_S, high_V), mask); speed_contrl(0.5,0.5);//这里就写了一个原地转圈圈哈,大家自己开发 imshow("mask",mask); waitKey(3);}这段代码前一部分是将ros的图片消息转换成opencv的图片类型Mat,这样可以方便的使用opencv的库函数来处理图像。中间我是使用色相环来过滤出蓝色和白色中的白色,色相环过滤在使用中我发现效果比二值化好多了,光线的影响也小很多,最后的话我就给大家写好了固定0.5的线速度和角度运动的代码,小车会在原地打转!
catkin_make 运行仿真模型:
运行仿真模型:
roslaunch racecar_gazebo racecar_normal_runway.launchrosrun racecar_gazebo findLine- cd ~/racecar_ws/src
- git clone https://github.com/xmy0916/racecar.git
- cd ..
- catkin_make
- source ./devel/setup.bash
- roslaunch racecar_gazebo racecar_normal_runway.launch
- rosrun racecar_gazebo findLine