YOLOv5:yolov5s.yaml文件解读
我的环境:
● 语言环境:Python 3.8
● 编译器:Pycharm
● 数据集:coco128
● 深度学习环境:Pytorch
一.参数配置:
# Parameters
nc: 80 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple·depth_multiple:控制子模块数量=int(number*depth)(该参数与任务有关)
·width_multiple:控制卷积核的数量=int(number*width)
二.anchors:
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32YOLOv5初始化了9个anchors,在三个Detect层使用(3个feature map)中使用,每个feature map的每个grid_cell 都有三个anchor进行预测。
规则:
1.尺度越大的feature map越靠前,相对原图的下采样率越小,感受野越小,所以相对可以预测一些尺度比较小的物体,所有分配到的anchors越小;
2.尺度越小的feature map 越靠后,相对原图的下采样率越大,感受野越大,所以相对可以预测一些尺度比较大的物体,所有分配到的anchors 越大。
即可以在小特征图(feature map)上检测大目标,也可以在大特征图上检测小目标。
三.backbone:
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 3, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 6, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 3, C3, [1024]],
[-1, 1, SPPF, [1024, 5]], # 9
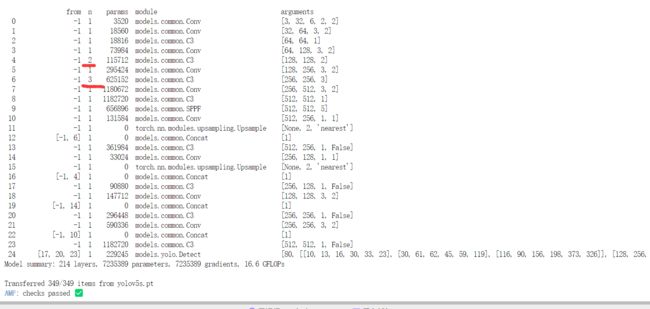
]这是yolov5s的backbone,可以看到每一个模块算一行,每行都由四个参数构成。分别是:
·from:表示当前模块的输入来自那一层的输出,-1表示来自上一层的输出。
·number:表示当前模块的理论重复次数,实际的重复次数还要由上面的参数depth_multiple共同决定,决定网络模型的深度。
·module:模块类名,通过这个类名去common.py中寻找相应的类,进行模块化的搭建网络。
·args:是一个1ist,模块搭建所需参数,channe1,kernel_size,stride,padding,bias等,会在网络搭建过程中根据不同层进行改变。
四.head:
# YOLOv5 v6.0 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
同backbone
任务:修改第四层的C3*2为C3*1,第六层的C3*3为C3*2
修改YOLOv5.yaml文件

模型输出