【计算机视觉学习03】全景图像拼接
文章目录
- 一、基本原理
-
- 1.1 图像拼接的几何原理
- 1.2 直线,圆,复杂曲线方程拟合
- 1.3 RANSAC算法
- 1.4 APAP算法
- 1.5 寻找最佳拼接缝(Seam Finding)
-
- 1.5.1 最大流问题
- 1.5.2 最大流问题的增广链算法
- 1.5.3 最大流最小割定理
- 二、 图像拼接具体实现
-
- 2.1 代码
- 2.2 运行结果
一、基本原理
将两幅或多幅具有重叠区域的图像,通过特征匹配将具有相同的特征点(SIFT特征点)的图像拼接在一起,将来自多个不同视角拍摄的图像变换到同一视角下,拼接成一张宽视野图像。
图像拼接基础流程
-
针对某个场景拍摄多张/序列图像
-
计算第二张图像与第一张图像之间的变换关系
-
将第二张图像叠加到第一张图像的坐标系中
-
变换后的融合/合成
-
在多图场景中,重复上述过程
1.1 图像拼接的几何原理
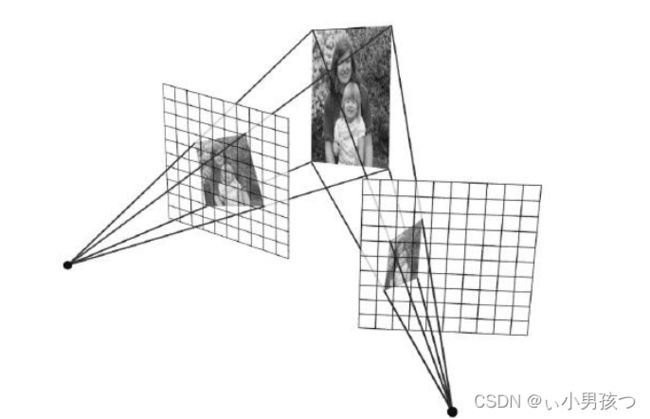
全景融合的 3D 几何解释
- 图像被投影到共同的拼接平面上(同一坐标系)
- 在拼接平面上实现全景融合
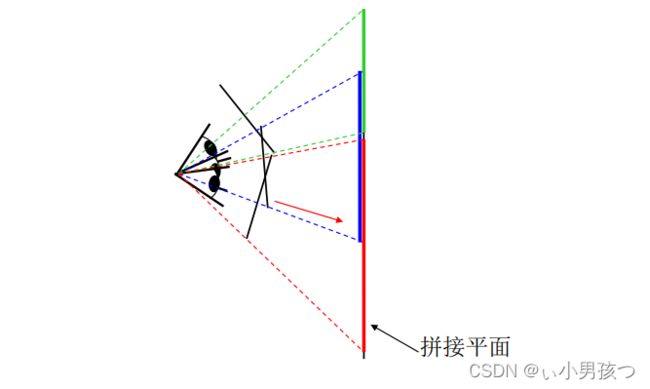
- 在拼接的应用中,其实可以简化理解为 2D图像的变换,叠加过程
1.2 直线,圆,复杂曲线方程拟合
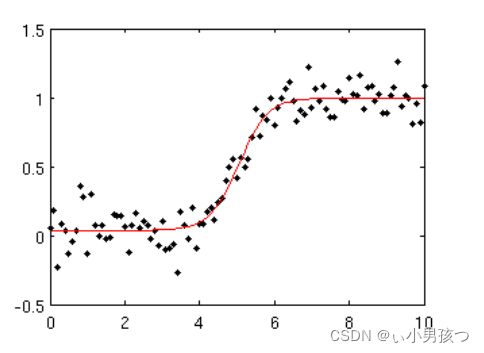
给定若干二维空间中的点,求直线 y = a x + b y=ax+by=ax+b ,使得该直线对空间点的拟合误差最小。
直线确定步骤:
- 随机选择两个点
- 根据该点构造直线
- 给定阈值,计算 inliers 数量
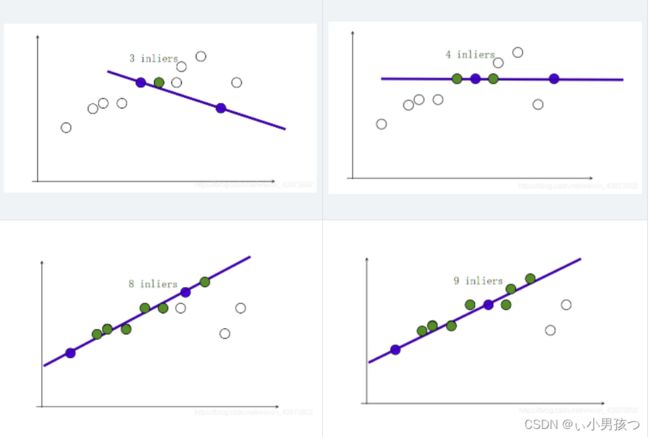
我们在空间中随机寻找两个点,并以这两点构造出一条直线,然后计算在这条线上的对应 inliers 的数量,当 inliers 值达到我们需要的阈值,我们就得到了一条拟合直线。
用这种方法我们可以拟合出一条直线,那么圆可以拟合吗?复杂的曲线方程可以拟合吗?
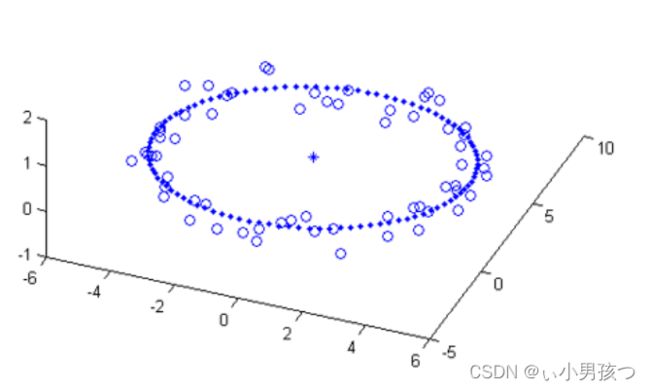
对于圆,我们同样可以用该方法,两点确定一条直线,三点可以确定一个圆,我们随机确定三个点,然后确定一个圆的方程,然后计算在圆上的 inliers 值,之后的过程就与直线的一致了。
对于复杂的曲线方程,我们需要先给定一个方程式,这个方程式的参数是我们要求的,求出一个解,使得在 inliers 值尽可能多,或者是求出的曲线与点之间是最逼近。
1.3 RANSAC算法
RANSAC 是“RANdom SAmple Consensus”(随机一致性采样)的缩写。该方法是用来找到正确模型来拟合带有噪声数据的迭代方法。给定一个模型,例如点集之间的单应性矩阵,RANSAC 基本的思想是,数据中包含正确的点和噪声点,合理的模型应该能够在描述正确数据点的同时摒弃噪声点。 即从一组数据集(包含噪声点的数据集)中,能够从中挑选出正确的点,获取能够正确拟合的参数模型。
RANSAC的基本思想和算法流程如下:
- 随机采样K个点,K是求解模型参数的最少点个数;
- 使用K个点估计模型参数;
- 计算剩余点到估计模型的距离,距离小于阈值则为内点,统计内点的数目;
- 重复步骤1~3,重复次数M且保留数目最多的内点;
- 使用所有的内点重新估计模型。
1.4 APAP算法
在图像拼接融合的过程中,拼接融合后的图像可能会存在“鬼影现象”,即图像叠加后出现重影的现象。如下图所示:


如何解决呢,2013年,Julio Zaragoza等人发表了一种新的图像配准算法APAP(As-Projective-As-Possible Image Stitching with Moving DLT),解决鬼影现象可以采用APAP算法。在拼接时,将图像分成很多个规则的小网格,分别计算局部的单应性变换矩阵,使整体的单应性变换误差降低。
通过使用APAP算法,鬼影消失了。

APAP算法流程:
- SIFT得到两幅图像的匹配点对
- 通过RANSAC剔除外点,得到N对内点
- 利用DLT和SVD计算全局单应性
- 将源图划分网格,取网格中心点,计算每个中心点和源图上内点之间的欧式距离和权重
- 将权重放到DLT算法的A矩阵中,构建成新的W*A矩阵,重新SVD分解,自然就得到了当前网格的局部单应性矩阵
- 遍历每个网格,利用局部单应性矩阵映射到全景画布上,就得到了APAP变换后的源图
- 最后就是进行拼接线的加权融合
APAP虽然能够较好地完成配准,但非常依赖于特征点对。若图像高频信息较少,特征点对过少,配准将完全失效,并且对大尺度的图像进行配准,其效果也不是很好,一切都决定于特征点对的数量.
1.5 寻找最佳拼接缝(Seam Finding)
在两张图像的重叠区域选择一条最佳拼接缝,拼接缝左边的图像为第一张图像的内容,拼接缝右边的图像为第二张图像的内容,并且拼接缝上两幅图像的差异应该尽可能小,这样也可以有效的解决“鬼影”现象,而且拼接的效果也会更好。



那么,如何找到最佳的拼接缝?这就需要使用到 Seam Finding(寻找最佳拼接缝)算法。算法主要原理运用了最大流最小割的思想。找到两张图像中差异最小的一条线,进行切割拼接,使得拼接缝两边的图像差异最小。
1.5.1 最大流问题
最大流问题(maximum flow problem),一种组合最优化问题。就是要讨论如何充分利用装置的能力,使得运输的流量最大,以取得最好的效果。
最大流问题归纳如下:
- 所有流经网络(有向且流通)的流都起源于同一点,称为发点(源),终止与另一个点,称为收点(汇)。
- 剩余的其他点称为中间点。
- 流的方向由箭头表明,弧的容量就是允许的最大流量。在发点,所有的流都从这一点发出。在收点,所有的流都指向这一点。
- 问题的目标是使从发点到收点的总流量达到最大。该值可以由两种等价的方式来衡量,即发点的流出量或收点的流入量。
1.5.2 最大流问题的增广链算法
如何解决最大流问题,我们一般使用增广链算法,通过不断寻找网络中的增广链,直到增广链不存在了,从而确定了最大流。

1.5.3 最大流最小割定理
对于任意一个只包含一个发点和收点的网络,从发点到收点的最大可行流等于网络所有割的最小割值。

二、 图像拼接具体实现
2.1 代码
from pylab import *
from numpy import *
from PIL import Image
# If you have PCV installed, these imports should work
from PCV.geometry import homography, warp
from PCV.localdescriptors import sift
np.seterr(invalid='ignore')
"""
This is the panorama example from section 3.3.
"""
# 设置数据文件夹的路径
featname = ['image/' + str(i + 1) + '.sift' for i in range(5)]
imname = ['image/' + str(i + 1) + '.jpg' for i in range(5)]
# 提取特征并匹配使用sift算法
l = {}
d = {}
for i in range(5):
sift.process_image(imname[i], featname[i])
l[i], d[i] = sift.read_features_from_file(featname[i])
matches = {}
for i in range(4):
matches[i] = sift.match(d[i + 1], d[i])
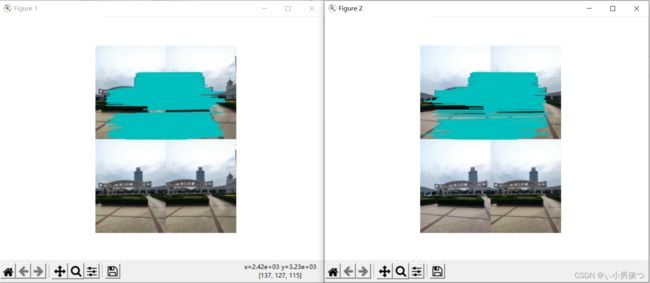
# 可视化匹配
for i in range(4):
im1 = array(Image.open(imname[i]))
im2 = array(Image.open(imname[i + 1]))
figure()
sift.plot_matches(im2, im1, l[i + 1], l[i], matches[i], show_below=True)
# 将匹配转换成齐次坐标点的函数
def convert_points(j):
ndx = matches[j].nonzero()[0]
fp = homography.make_homog(l[j + 1][ndx, :2].T)
ndx2 = [int(matches[j][i]) for i in ndx]
tp = homography.make_homog(l[j][ndx2, :2].T)
# switch x and y - TODO this should move elsewhere
fp = vstack([fp[1], fp[0], fp[2]])
tp = vstack([tp[1], tp[0], tp[2]])
return fp, tp
# 估计单应性矩阵
model = homography.RansacModel()
fp, tp = convert_points(1)
H_12 = homography.H_from_ransac(fp, tp, model)[0] # im 1 to 2
fp, tp = convert_points(0)
H_01 = homography.H_from_ransac(fp, tp, model)[0] # im 0 to 1
tp, fp = convert_points(2) # NB: reverse order
H_32 = homography.H_from_ransac(fp, tp, model)[0] # im 3 to 2
tp, fp = convert_points(3) # NB: reverse order
H_43 = homography.H_from_ransac(fp, tp, model)[0] # im 4 to 3
# 扭曲图像
delta = 2000 # for padding and translation用于填充和平移
im1 = array(Image.open(imname[1]), "uint8")
im2 = array(Image.open(imname[2]), "uint8")
im_12 = warp.panorama(H_12, im1, im2, delta, delta)
im1 = array(Image.open(imname[0]), "f")
im_02 = warp.panorama(dot(H_12, H_01), im1, im_12, delta, delta)
im1 = array(Image.open(imname[3]), "f")
im_32 = warp.panorama(H_32, im1, im_02, delta, delta)
im1 = array(Image.open(imname[4]), "f")
im_42 = warp.panorama(dot(H_32, H_43), im1, im_32, delta, 2 * delta)
figure()
imshow(array(im_42, "uint8"))
axis('off')
show()
2.2 运行结果
第一组


第二组


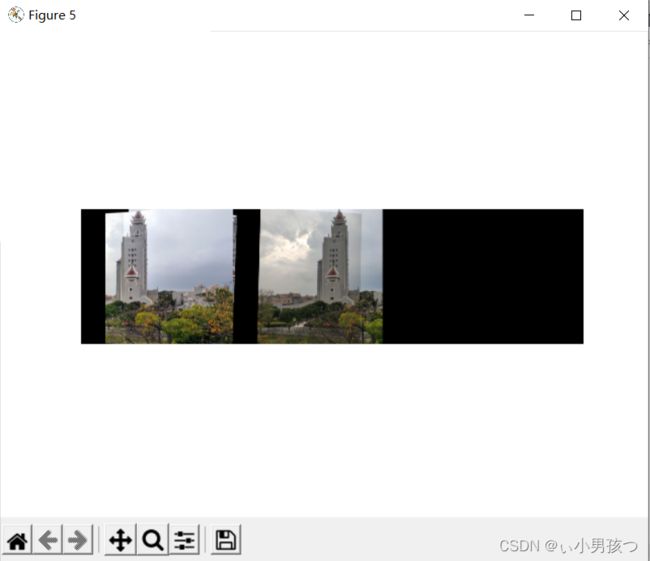
第二组可能是由于照片色调差异,加上照片底部树木原因造成拼接出现不连续,而且拼接缝也比较明显。