汽车电子电气架构演进驱动主机厂多重变化
已剪辑自: https://mp.weixin.qq.com/s/P56MaFODVc_eZ4JEOVJvfA
汽车电子电气架构(EEA,Electrical/Electronic Architecture)把汽车中的各类传感器、ECU(电子控制单元)、线束拓扑和电子电气分配系统整合在一起完成运算、动力和能量的分配,进而实现整车的各项功能。
如果将汽车比作人体,汽车的机械结构相当于人的骨骼,动力、转向相当于人的四肢,电子电气架构则相当于人的神经系统和大脑,是汽车实现信息交互和复杂操作的关键。
电子电气架构涵盖了车上计算和控制系统的软硬件、传感器、通信网络、电气分配系统等;它通过特定的逻辑和规范将各个子系统有序结合起来,构成实现复杂功能的有机整体。
功能车时代,汽车一旦出厂,用户体验就基本固化;智能车时代,汽车常用常新,千人千面,电子电气架构向集中化演进是这一转变的前提。
从分布式到域控制再到集中式,随着芯片和通信技术的发展,电子电气架构正在发生巨大的变化。
1.1
分布式电子电气架构不堪重负汽车诞生之初是个纯机械产品,车上没有蓄电池,车上的设备亦不需要电力,1927 年博世开发出铅蓄电池,从此车上的电子设备才有了可靠的电力来源。大规模集成电路的发展让汽车电子得以快速发展,发动机定时点火控制系统、电控燃油喷射系统、自动变速箱控制系统、牵引力控制系统、电控悬架系统、电控座椅、电控车窗、仪表、电控空调、汽车电子稳定控制系统等,逐步成为了汽车不可或缺的组成部分。汽车电子控制技术逐步发展壮大,为消费者提供了更高性能、更舒适、更安全的出行工具。 早期分布式的电子电气架构下,每个 ECU 通常只负责控制一个单一的功能单元,彼此独立,分别控制着发动机、刹车、车门等部件,常见的有发动机控制器(ECM)、传动系统控制器(TCM)、制动控制器(BCM)、电池管理系统(BMS)等。各个 ECU 之间通过 CAN(Controller Area Network,控制器域网络)总线或者 LIN(Local Interconnect Network,局部互联网络)总线连接在一起,通过厂商预先定义好的通信协议交换信息。随着整车电子电气产品应用的增加,ECU 的数量从几十个快速增加到 100 多个,ECU 数量越多,对应的总线的线束长度必将越长,线束重量也相应增加(2007 年上市的奥迪 Q7 和保时捷卡宴的总线长度超 6km,总重量超 70kg,是全车重量仅次于发动机的部件),这就导致整车成本增加、汽车组装的自动化水平低。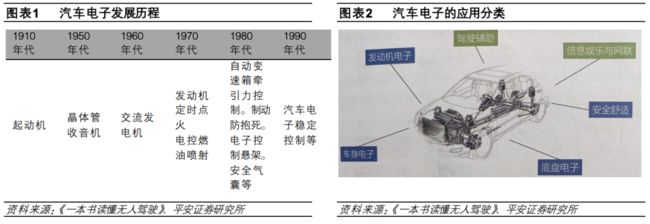 分布式计算导致了车内信息孤岛、算力浪费、软硬件耦合深,主机厂严重依赖供应商。 传统汽车供应链中,不同的 ECU 来自不同供应商,不同的硬件有不同的嵌入式软件和底层代码,整车软件实际上是很多独立的、不兼容的软件混合体,导致整个系统缺乏兼容性和扩展性。车厂要进行任何功能变更都需要和许多不同的供应商去协商软硬件协调开发问题,每新增一个新功能都需要增加一套 ECU 和通信系统,耗时长,流程繁琐。且由于每个 ECU 绑定一个具体功能,无法实现横跨多个 ECU/传感器的复杂功能,亦无法通过 OTA(Over-the-Air)来保持汽车软件的持续更新。 **分布式电子电气架构导致通信带宽瓶颈。**智能网联车功能越来越复杂,车辆传感器数量增加,由此产生的数据传输及处理的实时性要求提高,汽车内部网络通信数据量呈指数级增长趋势,传统的 FlexRay、LIN 和 CAN 低速总线已无法提供高带宽通信能力,也无法适应数据传输及处理的实时性要求。
分布式计算导致了车内信息孤岛、算力浪费、软硬件耦合深,主机厂严重依赖供应商。 传统汽车供应链中,不同的 ECU 来自不同供应商,不同的硬件有不同的嵌入式软件和底层代码,整车软件实际上是很多独立的、不兼容的软件混合体,导致整个系统缺乏兼容性和扩展性。车厂要进行任何功能变更都需要和许多不同的供应商去协商软硬件协调开发问题,每新增一个新功能都需要增加一套 ECU 和通信系统,耗时长,流程繁琐。且由于每个 ECU 绑定一个具体功能,无法实现横跨多个 ECU/传感器的复杂功能,亦无法通过 OTA(Over-the-Air)来保持汽车软件的持续更新。 **分布式电子电气架构导致通信带宽瓶颈。**智能网联车功能越来越复杂,车辆传感器数量增加,由此产生的数据传输及处理的实时性要求提高,汽车内部网络通信数据量呈指数级增长趋势,传统的 FlexRay、LIN 和 CAN 低速总线已无法提供高带宽通信能力,也无法适应数据传输及处理的实时性要求。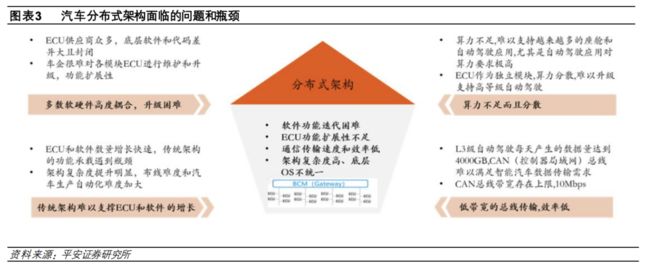 我们用一个具体的例子来说明分布式电子电气架构下的弊端: 假设车厂需要修改一个雨刷总成的功能,由于每一款车在开发流程中的既定节点上,都要对雨刷总成进行定义、标定和验证,后续修改即相当于二次开发,车企需要重新和雨刷供应商签合同,重新做各个层级的标定和验证。显然这样一种面向硬件的工程化体系和流程,在车辆越来越复杂的未来,是无法支撑产品的快速迭代进化的。 解决之道就是把硬件标准化。雨刷总成是一个电机驱动的机械部件,雨刷所需的传感器可调用车辆上搭载的摄像头或其他传感器,一旦感应到挡风玻璃透明度下降,车辆即可通过软件控制让雨刷自动启动合适的工作模式,这就实现了软件定义雨刷功能的目的。当各种不同的总成、模块都标准化以后,就可以通过中央控制器里的软件来实现更高等级的智能,就像手机上运行的多个 APP,既可大幅缩短产品开发周期,也可广泛采用标准化的零部件,有助于企业控制成本和质量。比如一家零部件企业开发和生产一款标准化的雨刷,然后卖给各家整车企业,其价格会非常便宜;同时,标准化硬件的标定和验证都可适当简化,从而进一步节省开发时间和成本。1.2
我们用一个具体的例子来说明分布式电子电气架构下的弊端: 假设车厂需要修改一个雨刷总成的功能,由于每一款车在开发流程中的既定节点上,都要对雨刷总成进行定义、标定和验证,后续修改即相当于二次开发,车企需要重新和雨刷供应商签合同,重新做各个层级的标定和验证。显然这样一种面向硬件的工程化体系和流程,在车辆越来越复杂的未来,是无法支撑产品的快速迭代进化的。 解决之道就是把硬件标准化。雨刷总成是一个电机驱动的机械部件,雨刷所需的传感器可调用车辆上搭载的摄像头或其他传感器,一旦感应到挡风玻璃透明度下降,车辆即可通过软件控制让雨刷自动启动合适的工作模式,这就实现了软件定义雨刷功能的目的。当各种不同的总成、模块都标准化以后,就可以通过中央控制器里的软件来实现更高等级的智能,就像手机上运行的多个 APP,既可大幅缩短产品开发周期,也可广泛采用标准化的零部件,有助于企业控制成本和质量。比如一家零部件企业开发和生产一款标准化的雨刷,然后卖给各家整车企业,其价格会非常便宜;同时,标准化硬件的标定和验证都可适当简化,从而进一步节省开发时间和成本。1.2
汽车电子电气架构向中央计算迈进汽车分布式电子电气架构已不能适应汽车智能化的进一步进化。高度集成是解决之道。基于少量高性能处理器打造汽车的“大脑”,通过一套新型的电子电气架构,形成快速传递信息的“神经网络”和“血管”,以控制和驱动所有电子件和传感器。 少量的高性能计算单元替代过去大量分布式 MCU(微控制单元),多个分散的小传感器集成为功能更强的单个传感器,汽车 、功能逐步整合集中,ECU 的减负意味着把整车原先搭载的几十上百个 ECU逐一进行软硬件剥离,再把功能主要通过软件迁移到域控制器(域控制器是指域主控硬件、操作系统、算法和应用软件等几部分组成的整个系统的统称)中,如自动驾驶、娱乐、网关等,在域控制器架构的基础上,更进一步把不同功能的域进行整合,就到了跨域融合阶段,再进一步到中央计算+位置域阶段。华为判断到 2030 年电子电气架构将演进为中央计算平台+区域接入+大带宽车载通信的计算和通信架构。 汽车电子电气架构的升级主要体现在硬件架构、软件架构、通信架构三方面:硬件架构从分布式向域控制/中央集中式方向发展、软件架构从软硬件高度耦合向分层解耦方向发展、通信架构由LIN/CAN 总线向以太网方向发展。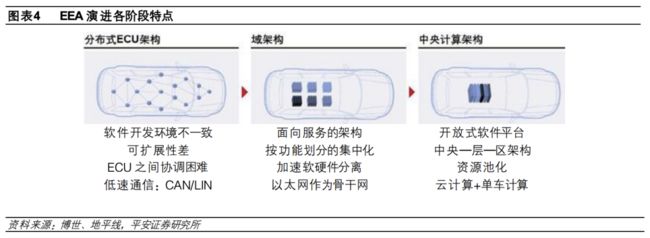 博世给出的电子电气架构路线图分为六个阶段,已成行业共识:分布式阶段(包括模块化、集成化)——域集中式(包括集中化、域融合)、中央集中式(包括车载电脑、车云计算)。
博世给出的电子电气架构路线图分为六个阶段,已成行业共识:分布式阶段(包括模块化、集成化)——域集中式(包括集中化、域融合)、中央集中式(包括车载电脑、车云计算)。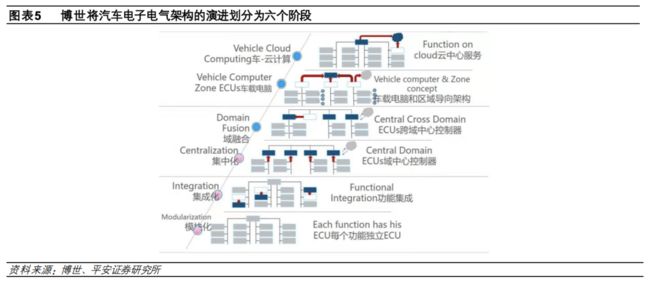 **模块化阶段。**1)一个 ECU 负责特定的功能,比如车上的灯光对应有一个控制器,门对应有一个控制器,无钥匙系统对应有一个控制器。随着汽车功能增多这种架构日益复杂无法持续。2)集成化阶段,单个 ECU 负责多个功能,ECU数量较上一阶段减少。在这两个阶段,汽车电子电气架构仍处于分布式阶段,ECU 功能集成度较低。 **功能域控阶段。**功能域即根据功能划分的域控制器,最常见的是如博世划分的五个功能域(动力域、底盘域、车身域、座舱域、自动驾驶域)。域控制器间通过以太网和 CANFD(CAN with Flexible Data-Rate)相连,其中座舱域和自动驾驶域由于要处理大量数据,算力需求逐步增长。动力总成域、底盘域、车身域主要涉及控制指令计算及通讯资源,算力要求较低。 **跨域融合阶段。**在功能域基础上,为进一步降低成本和增强协同,出现了跨域融合,即将多个域融合到一起,由跨域控制单元进行控制。比如将动力域、底盘域、车身域合并为整车控制域,从而将五个功能域(自动驾驶域、动力域、底盘域、座舱域、车身域)过渡到三个功能域(自动驾驶域、智能座舱域、车控域)。
**模块化阶段。**1)一个 ECU 负责特定的功能,比如车上的灯光对应有一个控制器,门对应有一个控制器,无钥匙系统对应有一个控制器。随着汽车功能增多这种架构日益复杂无法持续。2)集成化阶段,单个 ECU 负责多个功能,ECU数量较上一阶段减少。在这两个阶段,汽车电子电气架构仍处于分布式阶段,ECU 功能集成度较低。 **功能域控阶段。**功能域即根据功能划分的域控制器,最常见的是如博世划分的五个功能域(动力域、底盘域、车身域、座舱域、自动驾驶域)。域控制器间通过以太网和 CANFD(CAN with Flexible Data-Rate)相连,其中座舱域和自动驾驶域由于要处理大量数据,算力需求逐步增长。动力总成域、底盘域、车身域主要涉及控制指令计算及通讯资源,算力要求较低。 **跨域融合阶段。**在功能域基础上,为进一步降低成本和增强协同,出现了跨域融合,即将多个域融合到一起,由跨域控制单元进行控制。比如将动力域、底盘域、车身域合并为整车控制域,从而将五个功能域(自动驾驶域、动力域、底盘域、座舱域、车身域)过渡到三个功能域(自动驾驶域、智能座舱域、车控域)。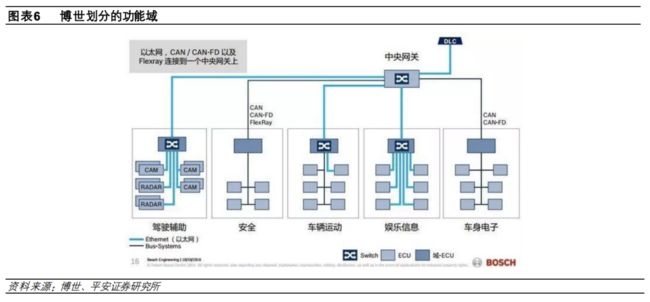
 **中央计算+位置域阶段。**随着功能域的深度融合,功能域逐步升级为更加通用的计算平台,从功能域跨入位置域(如中域、左域、右域)。区域控制器平台(Zonal Control Unit,ZCU)是整车计算系统中某个局部的感知、数据处理、控制与执行单元。它负责连接车上某一个区域内的传感器、执行器以及 ECU等,并负责该位置域内的传感器数据的初步计算和处理,还负责本区域内的网络协议转换。位置域实现就近布置线束,降低成本,减少通信接口,更易于实现线束的自动化组装从而提高效率。传感器、执行器等就近接入到附近的区域控制器中,能更好实现硬件扩展,区域控制器的结构管理更容易。区域接入+中央计算保证了整车架构的稳定性和功能的扩展性,新增的外部部件可以基于区域网关接入,硬件的可插拔设计支持算力不断提升,充足的算力支持应用软件在中央计算平台迭代升级。 在一项针对某家整车制造商的研究中,安波福发现,使用区域控制器可以整合 9个 ECU,并少用数百根单独电线,从而使车辆的重量减少了 8.5千克。减重有助于节能,并延长电动汽车的续驶里程。此外,由于区域控制器将车辆的基本电气结构划分为更易于管理的组成部分,更容易实现自动化线束组装。
**中央计算+位置域阶段。**随着功能域的深度融合,功能域逐步升级为更加通用的计算平台,从功能域跨入位置域(如中域、左域、右域)。区域控制器平台(Zonal Control Unit,ZCU)是整车计算系统中某个局部的感知、数据处理、控制与执行单元。它负责连接车上某一个区域内的传感器、执行器以及 ECU等,并负责该位置域内的传感器数据的初步计算和处理,还负责本区域内的网络协议转换。位置域实现就近布置线束,降低成本,减少通信接口,更易于实现线束的自动化组装从而提高效率。传感器、执行器等就近接入到附近的区域控制器中,能更好实现硬件扩展,区域控制器的结构管理更容易。区域接入+中央计算保证了整车架构的稳定性和功能的扩展性,新增的外部部件可以基于区域网关接入,硬件的可插拔设计支持算力不断提升,充足的算力支持应用软件在中央计算平台迭代升级。 在一项针对某家整车制造商的研究中,安波福发现,使用区域控制器可以整合 9个 ECU,并少用数百根单独电线,从而使车辆的重量减少了 8.5千克。减重有助于节能,并延长电动汽车的续驶里程。此外,由于区域控制器将车辆的基本电气结构划分为更易于管理的组成部分,更容易实现自动化线束组装。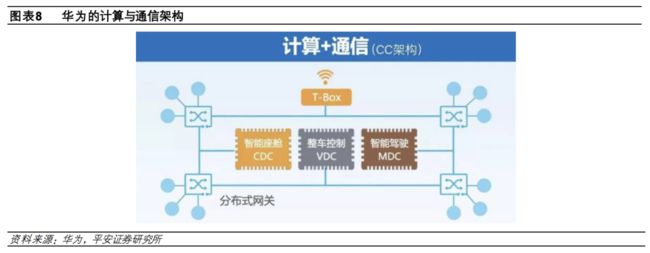
 **汽车云计算阶段。**将汽车部分功能转移至云端,车内架构进一步简化。车的各种传感器和执行器可被软件定义和控制,汽车的零部件逐步变成标准件,彻底实现软件定义汽车功能。
**汽车云计算阶段。**将汽车部分功能转移至云端,车内架构进一步简化。车的各种传感器和执行器可被软件定义和控制,汽车的零部件逐步变成标准件,彻底实现软件定义汽车功能。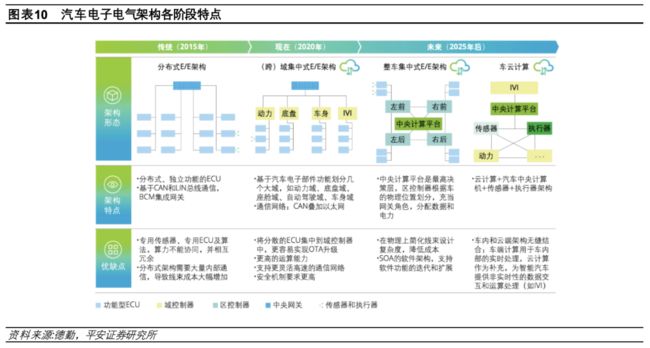 汽车电子电气架构的演进为软硬件解耦提供了有力支撑,高度中心化的电子电气架构带来计算集中化、软硬件解耦、平台标准化、功能定制化。1)算力趋向于集中,众多的 ECU集中到几个强大的算力平台,为软件运行提供了算力基础;2)底层软件和代码开始打通,操作系统为核心的软件生态开始建立,软件可以实现持续迭代,OTA 发展提速;3)域控制器+时间敏感以太网可以实现数据的高速处理和传输,为软件应用的发展创造了条件。
汽车电子电气架构的演进为软硬件解耦提供了有力支撑,高度中心化的电子电气架构带来计算集中化、软硬件解耦、平台标准化、功能定制化。1)算力趋向于集中,众多的 ECU集中到几个强大的算力平台,为软件运行提供了算力基础;2)底层软件和代码开始打通,操作系统为核心的软件生态开始建立,软件可以实现持续迭代,OTA 发展提速;3)域控制器+时间敏感以太网可以实现数据的高速处理和传输,为软件应用的发展创造了条件。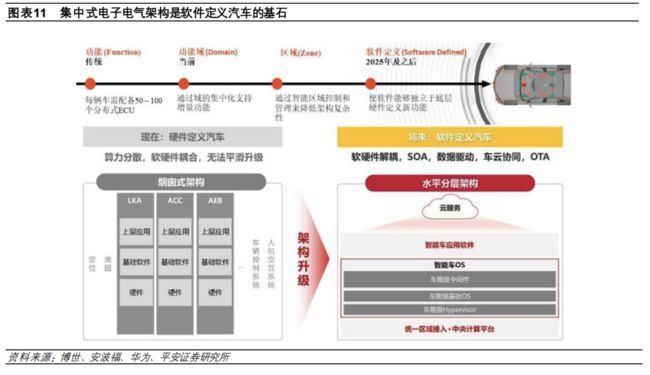
02各主机厂的电子电气架构进度对比未来汽车产品最核心的技术是电子电气架构,汽车电子电气架构由分散式、嵌入式逐渐向集中式、集成式的方向发展,最终的理想状态应该是形成一个汽车中央大脑(one brain),统一管理各种功能。电子电气架构类似于“中央政府”,可对汽车的各种功能进行统筹管理,避免“诸侯割据、政令不一”。开始的时候这个“中央政府”可能会管得少一些,“地方诸侯”还依然保有一定控制权,但之后“中央政府”一定会管得越来越多,最终地方行政机构只接收“中央政府”指令并予以高效执行,以确保车辆整体表现最优。 由于过去汽车上控制器相互独立,软件为嵌入式,整车做最终硬件集成即可。未来随着 ECU 的减负,原先高度分散的功能集成至域控制器,主机厂必须自己掌握中央控制系统,否则就会失去对汽车产品的控制权。而把原本高度分散的控制功能逐步整合统一起来是传统车企的全新必修课,因此车企对电子电气架构的掌握是分步的、渐进式的。 特斯拉 Model3 开启了电子电气架构大变革,出现中央计算雏形+位置域,缩短 50%整车线束,未来目标是将整车线束降至100 米,在电子架构方面,特斯拉领先传统车企 6年以上。除特斯拉以外,目前大部分的车企的电子电气架构仍处于早期的功能域控制器阶段,即部分功能集中到了功能域控制器,但还有保留较多分布式模块,即“分布式 ECU+域控制器”的过渡方案,避免因为变革程度太大导致额外的风险及成本。 大部分企业规划的下一代跨域融合电子电气架构将于 2022 年量产,以实现软件高度集中于域控制器,逐步减少分布式 ECU。到 2025 年部分车企落地中央计算+区域控制器的电子电气架构,从而实现软硬件的进一步集成,软件所有权逐步收归主机厂。朝着“中央计算+区域控制”的架构演进的过程可能长达 5-10 年。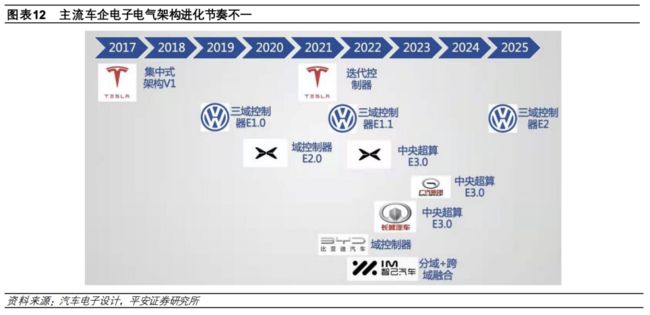 2.1
2.1
奥迪 A8 小试牛刀2018 年推出的奥迪 A8 率先实现了辅助驾驶功能的集成式控制,取代了 ECU 相互分离的分布式的辅助驾驶系统。
除自动驾驶域集成外,其余底盘+安全、动力、车身、娱乐四大域仍然采用分布式架构。 其自动驾驶域控制器由 4 块芯片组成,Mobileye EyeQ3 负责视觉感知计算,如交通信号识别、行人监测、碰撞报警,车道线识别、光线探测。英伟达 K1 负责图像融合计算,如驾驶员监测、360 全景摄像头的图像处理。英特尔 Cyclone V 负责目标融合、地图融合、停车辅助、预刹车灯。英飞凌的 Aurix TC297 负责通信处理。这个自动驾驶域控制器软件开发由奥地利软件公司 TTTech 完成,德尔福提供硬件集成。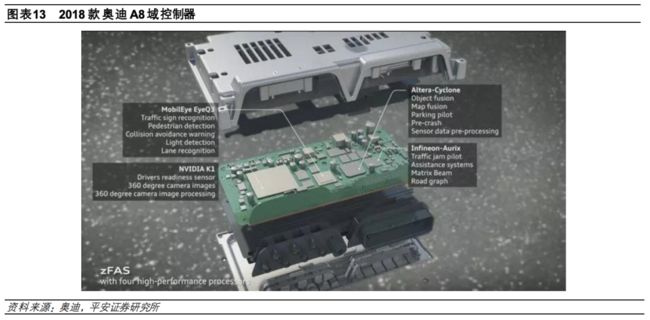 2.2
2.2
特斯拉 Model3 开启电子电气架构的全面变革特斯拉是汽车电子电气架构的全面变革者,2012 年 Model S 有较为明显的功能域划分,包括动力域、底盘域、车身域,ADAS 模块横跨了动力和底盘域,由于传统域架构无法满足自动驾驶技术的发展和软件定义汽车的需求,为解耦软硬件,搭载算力更强大的主控芯片,必须先进行电子电气架构的变革,因此 2017 年特斯拉推出的 Model3 突破了功能域的框架,实现了中央计算+区域控制器框架,通过搭建异域融合架构+自主软件平台,不仅实现软件定义汽车,还有效降低整车成本,提高效率:1)Model 3整车三个控制器,有效降低物料成本;2)硬件集成为软件,为汽车深度的控制和维护提供基础;3)自主软件平台通过模块化支持扩展复用。 特斯拉 Model3 基本实现了中央集中式架构的雏形,不过 Model3 距离真正的中央集中式架构还有相当距离:通讯架构以 CAN总线为主,中央计算模块只是形式上将影音娱乐 MCU、自动驾驶 FSD 以及车内外联网模块集成在一块板子上,且各模块独立运行各自的操作系统。但无论如何,Model3 已经践行了中央计算+区域控制的电子电气架构理念框架,领先传统车企 6 年左右。 特斯拉三代车的电子电气架构演进背后的实质是不断把车辆功能从供应商手中拿回来自主开发的过程。Model3 的自动驾驶模块、娱乐控制模块、其它区域控制器、热管理均为自主设计开发,实现了整车主要模块自主,不依赖 Tier1,即使没有实现自主的模块,特斯拉也与供应商进行了联合开发,比如特斯拉将自己的软件加入到了博世为其提供的 ibooster 里,通过软件更新实现刹车距离变短。 通过三款车型的演进,特斯拉的新型电子电气架构不仅实现了 ECU数量的大幅减少、线束大幅缩短(MODEL S 线束 3000米,Model 3 减少一半以上),更打破了汽车产业旧有的零部件供应体系(即软硬件深度耦合打包出售给主机厂,主机厂议价能力差,后续功能调整困难),真正实现了软件定义汽车,特斯拉的 OTA 可以改变制动距离、开通座椅加热,提供个性化的用户体验,由于突破了功能域,特斯拉的域控制器横跨车身、座舱、底盘及动力域,这使得车辆的功能迭代更为灵活,用户可以体验到车是常用常新的,与之形成鲜明对比的是,大部分传统车厂的 OTA 仅限于车载信息娱乐等功能。 特斯拉为了更好地发挥软件的作用,实现了自动驾驶主控芯片这一最为核心的智能硬件的自研自制(特斯拉认为芯片的专用设计使得其上的软件运行更高效),这意味着后续特斯拉车辆的升级速度、功能的部署都不再依赖外部 SOC 芯片供应商,真正将车辆的灵魂掌握在自己手中。
 Model 3整车四个控制器包括中央计算模块(CCM)、左车身控制模块(BCM LH)、右车身控制模块(BCM RH)和前车身控制模块(BCM FH)四大域控制器。左车身控制模块负责左车身便利性控制以及转向、制动、助力等。右车身控制模块负责右车身便利性控制、底盘安全系统、动力系统、热管理等。中央计算模块包括自动驾驶模块、信息娱乐模块、车内外通信连接,共用一套液冷系统。自动驾驶及娱乐控制模块接管与辅助驾驶有关的传感器——摄像头、毫米波雷达,将对算力需求较高的智能驾驶、信息娱乐放在一起,便于智能硬件持续升级,2019 年特斯拉推出自研 FSD 芯片替换了基于英伟达 Drive PX2 芯片组,AI 计算性能提升达 21 倍,随着特斯拉将自动驾驶最核心的计算硬件实现自研,特斯拉大幅提升了相对于竞争对手的领先优势。操作系统基于开源 Linux进行定制化裁剪,并自研中间件,软硬件均实现了自主可控,车型功能迭代更新速度加快,整车开发成本降低。
Model 3整车四个控制器包括中央计算模块(CCM)、左车身控制模块(BCM LH)、右车身控制模块(BCM RH)和前车身控制模块(BCM FH)四大域控制器。左车身控制模块负责左车身便利性控制以及转向、制动、助力等。右车身控制模块负责右车身便利性控制、底盘安全系统、动力系统、热管理等。中央计算模块包括自动驾驶模块、信息娱乐模块、车内外通信连接,共用一套液冷系统。自动驾驶及娱乐控制模块接管与辅助驾驶有关的传感器——摄像头、毫米波雷达,将对算力需求较高的智能驾驶、信息娱乐放在一起,便于智能硬件持续升级,2019 年特斯拉推出自研 FSD 芯片替换了基于英伟达 Drive PX2 芯片组,AI 计算性能提升达 21 倍,随着特斯拉将自动驾驶最核心的计算硬件实现自研,特斯拉大幅提升了相对于竞争对手的领先优势。操作系统基于开源 Linux进行定制化裁剪,并自研中间件,软硬件均实现了自主可控,车型功能迭代更新速度加快,整车开发成本降低。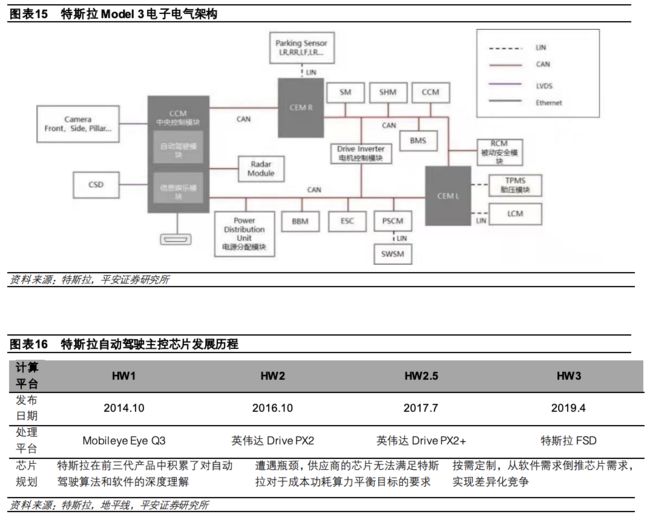 2.3
2.3
大众 ID 系列电子电气架构大众汽车已经从 MQB 平台车型的分布式电子电气架构升级为 MEB 平台 ID 系列车型上采用的三个功能域的电子电气架构。按规划,基于大众 MEB 平台的 ID系列电子电气架构为 E³1.1版,2023年在 PPE 平台搭载 E³1.2版,到 2025年后才进化到 E³2.0 版。 大众的 E3 架构主要由车辆控制域(ICAS1)、智能驾驶域(ICAS2)和智能座舱域(ICAS3)组成,其中智能驾驶域 ICAS2尚未开发完成,量产车型上搭载的依然是分布式架构方案,大众 ID 系列的电子电气架构虽然有三个功能域,但同时依然保留了较多分布式模块,大众 ID4 有 52 个 ECU,两倍于特斯拉 Model Y ECU数量。国产 ID4 辅助驾驶功能由 Mobileye 单目摄像头+前长距雷达+两个后角雷达实现,作为平价电动车,在自动驾驶域控制器这块暂时没有选择跟特斯拉和中国新势力去PK。
 大众 ID 系列车型 2021 年完成 7 万台交付量,低于前期规划。中国作为大众最重要的单一市场,智能化这块也正在加速追赶,2022 年大众软件公司 CARIAD 在中国成立子公司,据其中国子公司首席执行官介绍,该公司的核心业务是针对 MEB平台进行软件研发,2022 年下半年启动 OTA 功能,第二是针对高端平台(PPE 在华首款车 2024 年投产)做中国本土化、数字化产品,包括高级驾驶辅助系统,其智能网联系统也要与中国的基础设施建设相结合;第三是围绕 2025 年后 SSP 平台做软件研发。结合大众汽车 2030 NEW auto 的规划,软件自研比例要上升到 60%,软件研发保持自主的好处是实现敏捷(包括开发和维护)和体现产品差异化,其中本地化也是外资在中国提升智能化的必要且关键的一环,最终目的是打造吸引中国用户的有竞争力的产品。 我们看一下几款同一时间面世的三款电动车的电子电气架构的对比,虽然大众 ID 系列也号称是用三个域控制器代替过去 70+ 分布式 ECU,但实际上依然保有较多 ECU 数量,ID3 之前由于出现大面积的软件 BUG 而迟迟未按期交付,这也反映出传统车厂即使选择进行电子电气架构大变革,但若自身人才结构及软件实力尚不足够,就依然会严重依赖外部供应商,造成步子迈得太大带来额外风险。所以大部分主机厂选择的做法是走渐进式路线,随着自身软件实力提升逐步收归软件主导权。 2021 年 Munro & Associates 工程公司比较了特斯拉 Model Y、福特 Mach-E 和大众 ID.4 电气架构之间的差异。涉及三款电动车内 ECU 的数量、CAN 总线的数量、以太网的使用、LIN 总线、LVDS(Low-Voltage Differential Signaling,低电压差分信号)通道的使用、音频、保险丝和继电器的使用等方面。特斯拉 Model Y 集成度明显更高,其 ECU 数量是 ID4 的一半,福特和大众还保留了较多的现成的分布式 ECU,特斯拉的 LIN(本地互连网络)数量也仅为大众 ID4和福特 Mach-E 的一半。Tesla 中 CAN(控制器局域网)总线的数量更高,由于摄像头数量增加,特斯拉的低压差分信号(LVDS)使用量是福特和大众汽车的三倍以上,大众汽车的以太网的使用更多。特斯拉从 Model 3开始车辆的低压电气部分不采用任何保险丝盒继电器。
大众 ID 系列车型 2021 年完成 7 万台交付量,低于前期规划。中国作为大众最重要的单一市场,智能化这块也正在加速追赶,2022 年大众软件公司 CARIAD 在中国成立子公司,据其中国子公司首席执行官介绍,该公司的核心业务是针对 MEB平台进行软件研发,2022 年下半年启动 OTA 功能,第二是针对高端平台(PPE 在华首款车 2024 年投产)做中国本土化、数字化产品,包括高级驾驶辅助系统,其智能网联系统也要与中国的基础设施建设相结合;第三是围绕 2025 年后 SSP 平台做软件研发。结合大众汽车 2030 NEW auto 的规划,软件自研比例要上升到 60%,软件研发保持自主的好处是实现敏捷(包括开发和维护)和体现产品差异化,其中本地化也是外资在中国提升智能化的必要且关键的一环,最终目的是打造吸引中国用户的有竞争力的产品。 我们看一下几款同一时间面世的三款电动车的电子电气架构的对比,虽然大众 ID 系列也号称是用三个域控制器代替过去 70+ 分布式 ECU,但实际上依然保有较多 ECU 数量,ID3 之前由于出现大面积的软件 BUG 而迟迟未按期交付,这也反映出传统车厂即使选择进行电子电气架构大变革,但若自身人才结构及软件实力尚不足够,就依然会严重依赖外部供应商,造成步子迈得太大带来额外风险。所以大部分主机厂选择的做法是走渐进式路线,随着自身软件实力提升逐步收归软件主导权。 2021 年 Munro & Associates 工程公司比较了特斯拉 Model Y、福特 Mach-E 和大众 ID.4 电气架构之间的差异。涉及三款电动车内 ECU 的数量、CAN 总线的数量、以太网的使用、LIN 总线、LVDS(Low-Voltage Differential Signaling,低电压差分信号)通道的使用、音频、保险丝和继电器的使用等方面。特斯拉 Model Y 集成度明显更高,其 ECU 数量是 ID4 的一半,福特和大众还保留了较多的现成的分布式 ECU,特斯拉的 LIN(本地互连网络)数量也仅为大众 ID4和福特 Mach-E 的一半。Tesla 中 CAN(控制器局域网)总线的数量更高,由于摄像头数量增加,特斯拉的低压差分信号(LVDS)使用量是福特和大众汽车的三倍以上,大众汽车的以太网的使用更多。特斯拉从 Model 3开始车辆的低压电气部分不采用任何保险丝盒继电器。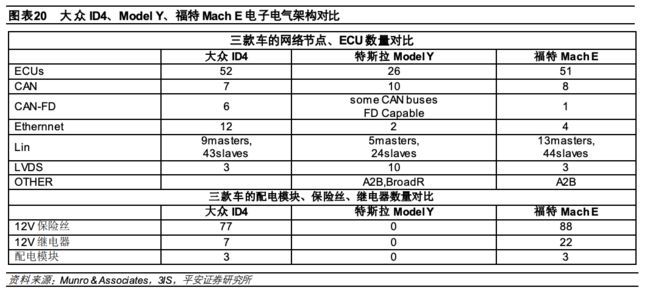 2.4
2.4
小鹏汽车 G9 电子电气架构具领先性新势力三强中小鹏汽车在电子电气架构方面走得比较领先,随着车型从 G3、P7 和 P5,迭代到 G9 的这套 X-EEA3.0 电子电气架构,已经进入到中央集中式电子电气架构。凭借领先一代的架构,搭载更高算力 SOC 芯片及更高算力利用率,小鹏G9 或成首款支持 XPILOT 4.0 智能辅助驾驶系统的量产车。 小鹏 P7 搭载小鹏第二代电子电气架构,具备混合式的特点: 1) 分层域控。功能域控制器(智驾域控制器、车身域控制器、动力域控制器等模块)与中央域控制器并存; 2) 跨域整合——域控制器覆盖多重功能,保留局部的传统 ECU; 3) 混合设计——传统的信号交互和服务交互成为并存设计。 因此 CAN 总线和以太网总线并存,大数据/实时性交互均得以保证;以太网节点少,对网关要求低。 小鹏第二代电子电气架构实现传统 ECU 数量减少约 60%,硬件资源实现高度集成,大部分的车身功能迁移至域控制器,中央处理器可实现支持仪表、信息娱乐系统以及智能车身相关控制的大部分功能,同时集成中央网关,兼容 V2X 的协议,支持车与车的局域网的通信,支持车与云端的互联,车与远程数字终端的连接功能。小鹏汽车的智能驾驶域控制器,集成了高速 NGP、城市 GNP 及泊车功能。小鹏辅助驾驶采用激光雷达视觉融合方案,与特斯拉的纯视觉方案不同,这就导致两者硬件架构不同,对于通讯带宽、计算能力的要求也不一样。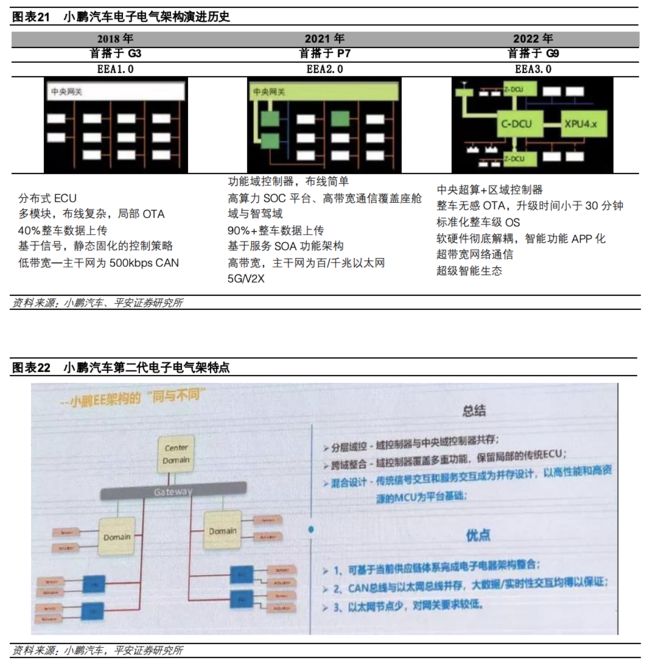 小鹏汽车将其 X-EEA3.0 电子电气架构称为“让智能汽车在未来永不落伍的秘密”。根据公司披露的首搭于 G9 的电子电气架构的信息,未来 G9 可以升级和优化的潜力较大。 X-EEA 3.0硬件架构方面,采用中央超算(C-DCU)+区域控制(Z-DCU)的硬件架构,中央超算包含车控、智驾、座舱 3个域控制器,区域控制器为左右域控制器,将更多控制件分区,根据就近配置的原则,分区接管相应功能,大幅缩减线束。 得益于小鹏汽车的全栈自研能力,新架构做到了硬件和软件的深度集成,不仅实现软硬件解耦,也实现软件分层解耦,可使得系统软件平台、基础软件平台、智能应用平台分层迭代,把车辆的底层软件和基础软件与智能、科技、性能相关的应用软件脱离开,在开发新功能时,只需要对最上层的应用软件进行研究和迭代就可以,缩短了研发周期和技术壁垒,用户也能够享受到车的快速迭代。 **系统软件平台:**基于外购代码做部分定制开发,随整车基础软件平台冻结而冻结,可复用于不同车型; **基础软件平台:**多个整车基础功能软件均形成标准服务接口且在车辆量产前冻结,可复用于不同车型; **智能应用平台:**如自动驾驶、智能语音控制、智能场景等功能,可实现快速开发和迭代。 X-EEA 3.0 数据架构方面,域控制器设置内存分区,升级运行互不干涉,便用车边升级,30分钟可升级完成。 通信架构方面,X-EEA3.0 在国内首次实现了以千兆以太网为主干的通信架构,同时支持多通讯协议,让车辆在数据传输方面更快速。从 G9 搭载的新一代电子电气架构可以看出,小鹏在骨干网络的建设和面向 SOA 的方向起步较早。 X-EEA 3.0 电力架构方面,可实现场景式精准配电,可根据驾驶、第三空间等不同用车场景按需配电,比如在路边等人时,可以只对空调、座椅调节、音乐等功能供电,其他部分断电,这样就能实现节能耗节省,提高续航里程。车辆定期自诊断,主动发现问题,引导维修,以科技手段赋能售后。
小鹏汽车将其 X-EEA3.0 电子电气架构称为“让智能汽车在未来永不落伍的秘密”。根据公司披露的首搭于 G9 的电子电气架构的信息,未来 G9 可以升级和优化的潜力较大。 X-EEA 3.0硬件架构方面,采用中央超算(C-DCU)+区域控制(Z-DCU)的硬件架构,中央超算包含车控、智驾、座舱 3个域控制器,区域控制器为左右域控制器,将更多控制件分区,根据就近配置的原则,分区接管相应功能,大幅缩减线束。 得益于小鹏汽车的全栈自研能力,新架构做到了硬件和软件的深度集成,不仅实现软硬件解耦,也实现软件分层解耦,可使得系统软件平台、基础软件平台、智能应用平台分层迭代,把车辆的底层软件和基础软件与智能、科技、性能相关的应用软件脱离开,在开发新功能时,只需要对最上层的应用软件进行研究和迭代就可以,缩短了研发周期和技术壁垒,用户也能够享受到车的快速迭代。 **系统软件平台:**基于外购代码做部分定制开发,随整车基础软件平台冻结而冻结,可复用于不同车型; **基础软件平台:**多个整车基础功能软件均形成标准服务接口且在车辆量产前冻结,可复用于不同车型; **智能应用平台:**如自动驾驶、智能语音控制、智能场景等功能,可实现快速开发和迭代。 X-EEA 3.0 数据架构方面,域控制器设置内存分区,升级运行互不干涉,便用车边升级,30分钟可升级完成。 通信架构方面,X-EEA3.0 在国内首次实现了以千兆以太网为主干的通信架构,同时支持多通讯协议,让车辆在数据传输方面更快速。从 G9 搭载的新一代电子电气架构可以看出,小鹏在骨干网络的建设和面向 SOA 的方向起步较早。 X-EEA 3.0 电力架构方面,可实现场景式精准配电,可根据驾驶、第三空间等不同用车场景按需配电,比如在路边等人时,可以只对空调、座椅调节、音乐等功能供电,其他部分断电,这样就能实现节能耗节省,提高续航里程。车辆定期自诊断,主动发现问题,引导维修,以科技手段赋能售后。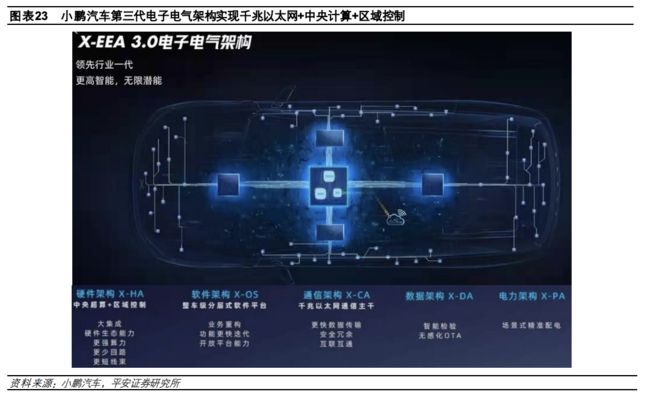 2.5
2.5
长城汽车电子电气架构发展路线图长城汽车 2020 年开发的第三代电子电气架构包含 4 个功能域控制器——车身控制、动力底盘、智能座舱、智能驾驶,应用软件自主研发,已实现量产并应用于长城汽车全系车型,车型物料成本得以优化,如新哈弗 H6 优化了 300 米线束,总长度1.6 公里,接近特斯拉 Model 3,减重超 2 公斤。 从 GEEP3.0开始长城汽车实现全部应用层软件自主开发能力,四个域控制器的上层应用软件,甚至部分底层及底层的集成软件亦由长城汽车自主开发。 2022 年内将推出的第四代电子电气架构将进一步集中整车控制软件,实现高效集成管理、高度安全可靠和更快需求响应。第四代架构拥有中央计算、智能座舱及高阶自动驾驶 3 个计算平台,外加 3 个区域控制器(左、右、前)。第四代架构将率先搭载到长城汽车的全新的电动、混动平台,并陆续扩展到全系车型。 第四代电子电气架构的中央计算单元跨域整合了车身、网关、空调、动力/底盘控制及 ADAS 功能,它的主控芯片算力高达 30KDMIPS,能够高效保障系统的控制和响应。GEEP 4.0 架构拥有成熟的视觉处理芯片解决方案,18 路 CAN FD、4 路 LIN、11 路车载以太网,以及 64GB 存储和 1GB 内存等配置,以备未来功能融合带来的算力和通信等需求。3 个区域控制器为标准化的控制单元,负责整合周边 MCU,目前三个区域控制器的大部分软件算法已经上移到中央计算单元中,由长城软件团队开发。 该架构引入 SOA 设计方式及理念,打造软件分层的基础架构平台,提供模块化标准服务接口,优势是可以提供积木式拆装组合、解耦软硬件平台,提高软件复用性,让汽车实现全生命周期的功能迭代升级,用户可以根据需求喜好,动态订阅升级车辆服务功能,无需等待软件升级批次。同时 SOA 化还能灵活部署智能化场景,标准化接口可实现开放服务,构建长城汽车众创生态,联合开发者为用户提供全场景智慧出行服务。 GEEP 4.0 支持固件空中升级,软件空中升级、远程诊断;同时支持整车所有 ECU OTA 功能,包含动力底盘系统、影音娱乐系统、车身系统、智能驾驶系统等。基于全新架构的云诊断方式为售后服务带来便利,基于车端、云端功能的部署,实现远程对车辆故障信息诊断,可以远程对车辆进行维修。在保证诊断和维修时效性同时,通过诊断知识库可以智能化地识别、分析,并匹配最优的维修方案,有效解决 4S 店人员不足、技术受限的短板,真正做到快速为用户排忧解难。
2022 年内将推出的第四代电子电气架构将进一步集中整车控制软件,实现高效集成管理、高度安全可靠和更快需求响应。第四代架构拥有中央计算、智能座舱及高阶自动驾驶 3 个计算平台,外加 3 个区域控制器(左、右、前)。第四代架构将率先搭载到长城汽车的全新的电动、混动平台,并陆续扩展到全系车型。 第四代电子电气架构的中央计算单元跨域整合了车身、网关、空调、动力/底盘控制及 ADAS 功能,它的主控芯片算力高达 30KDMIPS,能够高效保障系统的控制和响应。GEEP 4.0 架构拥有成熟的视觉处理芯片解决方案,18 路 CAN FD、4 路 LIN、11 路车载以太网,以及 64GB 存储和 1GB 内存等配置,以备未来功能融合带来的算力和通信等需求。3 个区域控制器为标准化的控制单元,负责整合周边 MCU,目前三个区域控制器的大部分软件算法已经上移到中央计算单元中,由长城软件团队开发。 该架构引入 SOA 设计方式及理念,打造软件分层的基础架构平台,提供模块化标准服务接口,优势是可以提供积木式拆装组合、解耦软硬件平台,提高软件复用性,让汽车实现全生命周期的功能迭代升级,用户可以根据需求喜好,动态订阅升级车辆服务功能,无需等待软件升级批次。同时 SOA 化还能灵活部署智能化场景,标准化接口可实现开放服务,构建长城汽车众创生态,联合开发者为用户提供全场景智慧出行服务。 GEEP 4.0 支持固件空中升级,软件空中升级、远程诊断;同时支持整车所有 ECU OTA 功能,包含动力底盘系统、影音娱乐系统、车身系统、智能驾驶系统等。基于全新架构的云诊断方式为售后服务带来便利,基于车端、云端功能的部署,实现远程对车辆故障信息诊断,可以远程对车辆进行维修。在保证诊断和维修时效性同时,通过诊断知识库可以智能化地识别、分析,并匹配最优的维修方案,有效解决 4S 店人员不足、技术受限的短板,真正做到快速为用户排忧解难。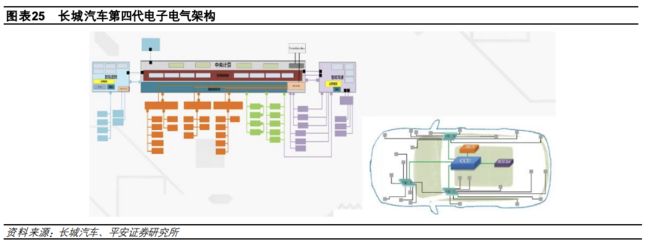 长城汽车第五代电子电气架构研发与第四代同步启动,第五代架构将整车软件高度集中在一个中央大脑(one brain),计划 2024 年面世。将实现 100% SOA 化,完成整车标准化软件平台的搭建。特斯拉目前所用的中央计算模块座舱芯片和智驾芯片是分离的,还不是 one brain 方案,从目前全球头部智能芯片厂家的趋势看,智驾芯片和座舱芯片融合为一片是大势所趋,但 one brain 方案对主机厂的软件能力要求很高。
长城汽车第五代电子电气架构研发与第四代同步启动,第五代架构将整车软件高度集中在一个中央大脑(one brain),计划 2024 年面世。将实现 100% SOA 化,完成整车标准化软件平台的搭建。特斯拉目前所用的中央计算模块座舱芯片和智驾芯片是分离的,还不是 one brain 方案,从目前全球头部智能芯片厂家的趋势看,智驾芯片和座舱芯片融合为一片是大势所趋,但 one brain 方案对主机厂的软件能力要求很高。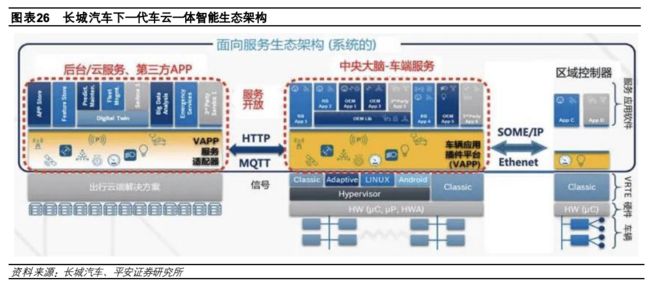 长城汽车的电子电气架构迭代速度快,将为自研智能化核心技术落地提供“地基”。电子电气架构快速迭代也与公司致力于在智能化方面保持领先地位这一目标强相关。 智能化方面,长城的典型致胜利器有:1)毫末智行的自动驾驶全栈自研技术。2)2023年投入商业应用的线控转向技术。 自动驾驶解决方案全栈自研方面:长城汽车旗下的毫末智行将于 2022 年内实现城市领航辅助驾驶功能,或与小鹏汽车比拼城市领航功能落地节奏。硬件方面,HPilot3.0 拥有 360TOPS 的强劲算力,全车配备 12 个摄像头和 2 个激光雷达,5 个毫米波雷达,12 个超声波雷达。毫末智行城市领航功能率先落地的原因之一是采用重感知的方案,而不是重地图的方案,不受城市高精地图限制。毫末智行城市领航计划 2022 年 6 月份 SOP,并可做到全国 100 多个城市有效的部署,在地理范围上具有很大优势。毫末智行整体部署范围大、车型多、数量多,可基于更多的数据保持高速的持续迭代。2022 年承担长城汽车 34 款待上市车型高级别辅助驾驶开发任务,占长城汽车全年待上市车型接近 80%,这些车型中 30% 是标配,其余均是高配搭载。 自动驾驶执行端方面:汽车智能化升级和电子电气架构的集中化,同时还需要对传统汽车底盘进行线控升级来适配发展,底盘控制系统与自动驾驶的执行环节强相关。线控底盘主要为线控转向、线控制动、线控换挡、线控油门、线控悬挂,其中线控转向和线控制动是面向自动驾驶执行端最核心的产品,当前全球主要的线控制动厂家是博世、大陆、采埃孚等传统 Tier1,进入门槛很高。2021 年中长城汽车首次发布智慧线控底盘,从电子机械线控制动、转向器、电机、模拟器、控制器等核心硬件到包括整个软件系统全都由长城汽车自主设计完成。这是全国首个支持 L4+ 自动驾驶的线控转向技术,将于 2023 年正式投入商业应用。2.6
长城汽车的电子电气架构迭代速度快,将为自研智能化核心技术落地提供“地基”。电子电气架构快速迭代也与公司致力于在智能化方面保持领先地位这一目标强相关。 智能化方面,长城的典型致胜利器有:1)毫末智行的自动驾驶全栈自研技术。2)2023年投入商业应用的线控转向技术。 自动驾驶解决方案全栈自研方面:长城汽车旗下的毫末智行将于 2022 年内实现城市领航辅助驾驶功能,或与小鹏汽车比拼城市领航功能落地节奏。硬件方面,HPilot3.0 拥有 360TOPS 的强劲算力,全车配备 12 个摄像头和 2 个激光雷达,5 个毫米波雷达,12 个超声波雷达。毫末智行城市领航功能率先落地的原因之一是采用重感知的方案,而不是重地图的方案,不受城市高精地图限制。毫末智行城市领航计划 2022 年 6 月份 SOP,并可做到全国 100 多个城市有效的部署,在地理范围上具有很大优势。毫末智行整体部署范围大、车型多、数量多,可基于更多的数据保持高速的持续迭代。2022 年承担长城汽车 34 款待上市车型高级别辅助驾驶开发任务,占长城汽车全年待上市车型接近 80%,这些车型中 30% 是标配,其余均是高配搭载。 自动驾驶执行端方面:汽车智能化升级和电子电气架构的集中化,同时还需要对传统汽车底盘进行线控升级来适配发展,底盘控制系统与自动驾驶的执行环节强相关。线控底盘主要为线控转向、线控制动、线控换挡、线控油门、线控悬挂,其中线控转向和线控制动是面向自动驾驶执行端最核心的产品,当前全球主要的线控制动厂家是博世、大陆、采埃孚等传统 Tier1,进入门槛很高。2021 年中长城汽车首次发布智慧线控底盘,从电子机械线控制动、转向器、电机、模拟器、控制器等核心硬件到包括整个软件系统全都由长城汽车自主设计完成。这是全国首个支持 L4+ 自动驾驶的线控转向技术,将于 2023 年正式投入商业应用。2.6
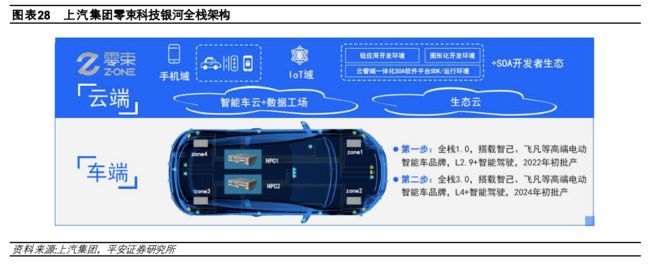
上汽零束电子电气架构上汽总工程师祖似杰认为,汽车产品最核心的技术是电子电气架构,且一定要由整车企业掌握。 电子电气架构作为汽车的中枢,将定义很多与此前完全不同的相关标准,因为过去汽车是一个封闭的系统,而未来汽车将是一个开放的系统。自动驾驶汽车普及之后车企要承担行车安全事故责任,安全技术只能自己把握,从这一点出发,车企也要把电子电气架构和中央控制系统牢牢掌握在自己手里,包括电子电气架构之上的车载操作系统、基础应用和服务软件架构等,都要充分理解并融会贯通。从对整车产品控制权的角度,祖似杰认为,原来汽车产品上的控制器是相互独立的,而且是嵌入式的,整车企业将其中一些交由供应商负责也不会有太大问题,未来汽车产品上的控制系统走向统一,整车企业必须自己掌握中央控制系统,否则就会失去对汽车产品的控制权。而把原本高度分散的控制功能逐步整合统一起来,是车企必须要走的一条正确而艰难的路。 上汽在旗下高端纯电智能车品牌智己、飞凡搭载全栈 1.0 版电子电气架构,全栈 1.0 电子电气架构有 3 个域控制器,即中央计算(车控及数据融合)、智能驾驶、智能座舱,同时还保留了较多分布式模块。2021 年 7 月启动“零束银河全栈 3.0 技术解决方案”的自主研发,进一步中央集中化,支持 L4级以上自动驾驶,计划 2024 年在上汽旗下智己、飞凡搭载。 零束银河全栈 3.0 电子电气架构使用主从两个高性能计算单元,即 HPC1 和 HPC2 来实现智能驾驶、智能座舱、智能计算、智能驾驶备份功能,再加 4 个区域控制器,实现各自不同区域的相关功能,以全面支撑 L4 以上智能驾驶技术。 底层狭义操作系统(OS)由异构升级为同构;骨干通信带宽扩容至千兆甚至万兆;智能车数据工厂全面实现数字孪生镜像,持续夯实云、管、端智能车网络安全防护体系,加速智能车自学习、自成长和自进化,使车真正成为直连用户的载体和入口、移动的 AIoT 平台和数字化体验空间。
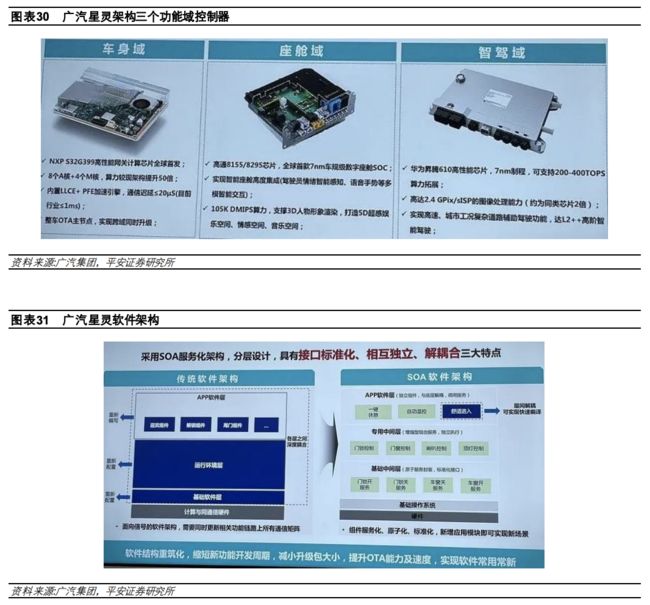
 广汽星灵电子电气架构计划于 2023 年搭载到广汽埃安全新车型上,其由汽车数字镜像云,中央计算机、智能驾驶计算机、信息娱乐计算机三个核心计算机群组,以及四个区域控制器组成,集成了千兆以太网、5G 和信息安全、功能安全等技术。相比广汽上一代电子电气架构,新架构的算力提升 50 倍,数据传输速率提升 10 倍,线束回路减少约 40%,控制器减少约20 个。 硬件架构上三个功能域控制器+前后左右四个区域控制器,与长城汽车第四代电子电气架构类似。其中中央运算单元(车身控制+新能源控制)搭载 NXP S32G399高性能网关计算芯片;座舱域搭载高通 8155/8295芯片;智驾域搭载华为昇腾 610高性能芯片,算力为 400TOPS。分布于车身前后左右的 4 个区域控制器主要负责供电以及执行中央控制单元的指令,中央计算单元与四个区域控制器之间采用以太网连接。软件结构方面,“星灵”架构采用了 SOA 软件架构以取代传统软件架构,以实现组件服务化、原子化和标准化,新增应用模块即可实现新场景。
广汽星灵电子电气架构计划于 2023 年搭载到广汽埃安全新车型上,其由汽车数字镜像云,中央计算机、智能驾驶计算机、信息娱乐计算机三个核心计算机群组,以及四个区域控制器组成,集成了千兆以太网、5G 和信息安全、功能安全等技术。相比广汽上一代电子电气架构,新架构的算力提升 50 倍,数据传输速率提升 10 倍,线束回路减少约 40%,控制器减少约20 个。 硬件架构上三个功能域控制器+前后左右四个区域控制器,与长城汽车第四代电子电气架构类似。其中中央运算单元(车身控制+新能源控制)搭载 NXP S32G399高性能网关计算芯片;座舱域搭载高通 8155/8295芯片;智驾域搭载华为昇腾 610高性能芯片,算力为 400TOPS。分布于车身前后左右的 4 个区域控制器主要负责供电以及执行中央控制单元的指令,中央计算单元与四个区域控制器之间采用以太网连接。软件结构方面,“星灵”架构采用了 SOA 软件架构以取代传统软件架构,以实现组件服务化、原子化和标准化,新增应用模块即可实现新场景。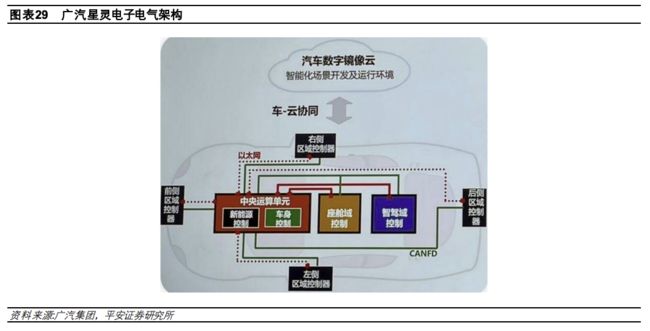
 好的电子电气架构,一是可以节省成本,包括制造成本和用车成本,生产端可以节省物料,简化装配,提升开发与制造效率,在表层功能差不多的情况下,消费者使用电子架构集成度更高的车能耗可能更低。二是快速提供丰富多样的功能,主机厂可以针对不同场景开发各式功能,比如特斯拉的座椅加热、节日模式等,而且功能更新也应该是主机厂可以把控,不需要像过去功能车那样为改变一个功能而进行一次复杂的供应链组织。 如果没有底层架构的升级,无论表面有多少智能化的功能,都还不能算是真正的智能车。比如分布式电子电气架构也可以实现自动泊车和 L2 智能驾驶功能的,但由于架构的限制,无法把传感器接入到一个智能驾驶域控制器中,只能搭载两个独立的控制单元——泊车控制器、行车控制器,无法共用算力及传感硬件,这就导致资源浪费,且在后续功能升级中存在掣肘。产品定义是架构开发的前提,车企将根据自己的品牌形象、产品定位、目标客户、内部资源去做出取舍。比如车企可能优先选择在智能座舱方面的集成,而辅助驾驶部分采用低成本的分布式方案。也可能优先选择在底盘、车身控制方面做高度集成。不同车企的品牌矩阵、车型结构有差异,架构也需要考虑平台公用性和沿用性。
好的电子电气架构,一是可以节省成本,包括制造成本和用车成本,生产端可以节省物料,简化装配,提升开发与制造效率,在表层功能差不多的情况下,消费者使用电子架构集成度更高的车能耗可能更低。二是快速提供丰富多样的功能,主机厂可以针对不同场景开发各式功能,比如特斯拉的座椅加热、节日模式等,而且功能更新也应该是主机厂可以把控,不需要像过去功能车那样为改变一个功能而进行一次复杂的供应链组织。 如果没有底层架构的升级,无论表面有多少智能化的功能,都还不能算是真正的智能车。比如分布式电子电气架构也可以实现自动泊车和 L2 智能驾驶功能的,但由于架构的限制,无法把传感器接入到一个智能驾驶域控制器中,只能搭载两个独立的控制单元——泊车控制器、行车控制器,无法共用算力及传感硬件,这就导致资源浪费,且在后续功能升级中存在掣肘。产品定义是架构开发的前提,车企将根据自己的品牌形象、产品定位、目标客户、内部资源去做出取舍。比如车企可能优先选择在智能座舱方面的集成,而辅助驾驶部分采用低成本的分布式方案。也可能优先选择在底盘、车身控制方面做高度集成。不同车企的品牌矩阵、车型结构有差异,架构也需要考虑平台公用性和沿用性。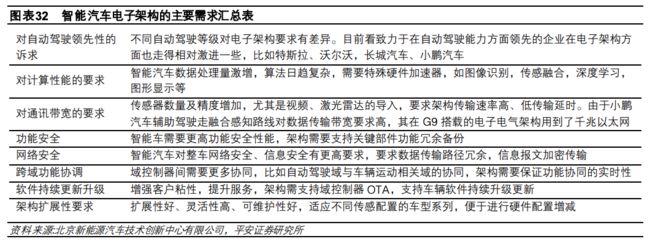
03架构演进驱动主机厂多重变化3.1
架构演进,汽车软件所有权逐渐收归主机厂汽车电子架构迈向中央计算,ECU 数量减少,意味着原先软硬一体的模块拆解出来,再进行域控制器的集中,而这并非简单的物理集成,越来越多的主机厂正在收拢更多主导权,从应用层软件到中间件,到底层软件,甚至到核心硬件,都希望实现全栈覆盖,这个过程是主机厂将原先软硬一体的供应商的软件部分抽取出来聚集于自身的过程。受制于现存供应链和自身软件实力弱,这会是一个渐进的过程。一旦电子电气架构进入中央计算+区域控制阶段以后,汽车软件所有权将主要属于主机厂,主机厂将长期享有软件红利,比传统车时代拥有更强的产业链话语权,主机厂将把产品持续更新的命脉握在自己手中。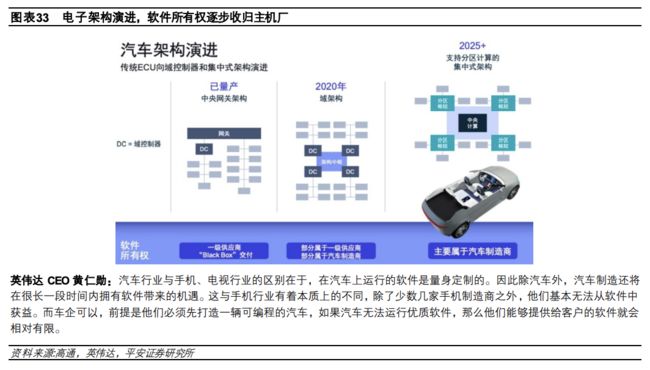 分布式架构下,主机厂相当于一个硬件集成者,Tier1 把上游的 Tier2(嵌入式软件供应商、芯片供应商)打包后提供给主机厂,为提高产品把控权,主机厂在功能车时代一般选择自研高价值模块,也是消费者能感受到的差异化部分,即动力总成部分。 第二阶段的功能域部分,类似功能合并为域,软件逐步从过去的黑盒中分离,主机厂出于原有供应链和自身软件能力的考虑,选择直接与原来的 Tier1/2 合作,在应用软件层,可能选择合作模式,也可能选择自研模式,比如小鹏、长城的自动驾驶算法选择自研,而其它一些主机厂选择与百度、momenta、小马智行、华为进行合作。这时主机厂根据能力不同,对域控制器的软硬件部分参与程度不一,由此域控制器供应商的服务也不同,对于自研程度深的主机厂,域控制器供应商相当于纯代工角色,对于自研程度浅的主机厂来说,域控制器供应商相当于全方位的“保姆”角色。 第三阶段跨出功能域框架,进入中央计算+区域控制阶段以后,大部分 ECU消失,各传感器/执行器被中央计算单元支配,原属于 Tier1的大部分策略层的软件由主机厂主导,主机厂对软件中的高价值模块的介入程度渐深,因此主机厂必须要有专业的软件团队,以集成自研与外包软件,软件所有权主要属于汽车制造商。大众汽车计划到 2030年将软件自研比率提升到 60%(聚焦于人工智能、大数据、保密以及安全),虽然自研比例大幅提升,外采软件总规模也将增长,但大众将定义车载软件的标准和路线图。CARIAD业务规划主要涵盖四块内容:1)电子电气架构 E³架构;2)VW.OS(大众汽车操作系统);3)VW.AC(大众汽车云);4)关键应用。
分布式架构下,主机厂相当于一个硬件集成者,Tier1 把上游的 Tier2(嵌入式软件供应商、芯片供应商)打包后提供给主机厂,为提高产品把控权,主机厂在功能车时代一般选择自研高价值模块,也是消费者能感受到的差异化部分,即动力总成部分。 第二阶段的功能域部分,类似功能合并为域,软件逐步从过去的黑盒中分离,主机厂出于原有供应链和自身软件能力的考虑,选择直接与原来的 Tier1/2 合作,在应用软件层,可能选择合作模式,也可能选择自研模式,比如小鹏、长城的自动驾驶算法选择自研,而其它一些主机厂选择与百度、momenta、小马智行、华为进行合作。这时主机厂根据能力不同,对域控制器的软硬件部分参与程度不一,由此域控制器供应商的服务也不同,对于自研程度深的主机厂,域控制器供应商相当于纯代工角色,对于自研程度浅的主机厂来说,域控制器供应商相当于全方位的“保姆”角色。 第三阶段跨出功能域框架,进入中央计算+区域控制阶段以后,大部分 ECU消失,各传感器/执行器被中央计算单元支配,原属于 Tier1的大部分策略层的软件由主机厂主导,主机厂对软件中的高价值模块的介入程度渐深,因此主机厂必须要有专业的软件团队,以集成自研与外包软件,软件所有权主要属于汽车制造商。大众汽车计划到 2030年将软件自研比率提升到 60%(聚焦于人工智能、大数据、保密以及安全),虽然自研比例大幅提升,外采软件总规模也将增长,但大众将定义车载软件的标准和路线图。CARIAD业务规划主要涵盖四块内容:1)电子电气架构 E³架构;2)VW.OS(大众汽车操作系统);3)VW.AC(大众汽车云);4)关键应用。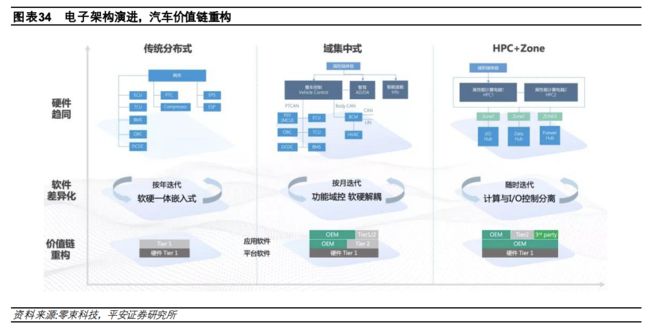 自研高价值模块的多少将很大程度决定不同主机厂的盈利能力,类似于不同消费电子品牌有着巨大的盈利能力差异(近三年苹果净利率 20-26%,小米净利率 5-8%)。主机厂根据自身业务体量、研发实力、现金流状况、历史包袱等评估适合自己的路径。平价与豪华,燃油与电动都将做出截然不同的转型选择。1)第一梯队,比如特斯拉,实现芯片、操作系统、中间件、域控制器系统集成等核心领域全自研,硬件外包。 2)选择一到两个核心技术上重点突破。比如自动驾驶感知算法是否选择自研。从自动驾驶算法自研落地节奏看,小鹏、长城、华为相对靠前。也有主机厂选择自研座舱芯片,比如吉利汽车旗下的亿咖通。 3)多手准备。主机厂一方面组建自己的软件团队,另一方面积极同科技企业/互联网公司建立合作联盟,在自身拥有成熟的软件开发能力之前,基础软件,软硬件架构方案仍依赖 TIER-1 或新兴软件企业。比如上汽集团的零束,目前跟外部各类企业合作较多,涵盖SOC 芯片企业、算法公司、域控制器供应商等(高通、地平线、联合电子、momenta)。4)车企只做品牌运营,软件开发主要外包,零部件作为一个系统整体打包给大型供应商或者互联网企业。
自研高价值模块的多少将很大程度决定不同主机厂的盈利能力,类似于不同消费电子品牌有着巨大的盈利能力差异(近三年苹果净利率 20-26%,小米净利率 5-8%)。主机厂根据自身业务体量、研发实力、现金流状况、历史包袱等评估适合自己的路径。平价与豪华,燃油与电动都将做出截然不同的转型选择。1)第一梯队,比如特斯拉,实现芯片、操作系统、中间件、域控制器系统集成等核心领域全自研,硬件外包。 2)选择一到两个核心技术上重点突破。比如自动驾驶感知算法是否选择自研。从自动驾驶算法自研落地节奏看,小鹏、长城、华为相对靠前。也有主机厂选择自研座舱芯片,比如吉利汽车旗下的亿咖通。 3)多手准备。主机厂一方面组建自己的软件团队,另一方面积极同科技企业/互联网公司建立合作联盟,在自身拥有成熟的软件开发能力之前,基础软件,软硬件架构方案仍依赖 TIER-1 或新兴软件企业。比如上汽集团的零束,目前跟外部各类企业合作较多,涵盖SOC 芯片企业、算法公司、域控制器供应商等(高通、地平线、联合电子、momenta)。4)车企只做品牌运营,软件开发主要外包,零部件作为一个系统整体打包给大型供应商或者互联网企业。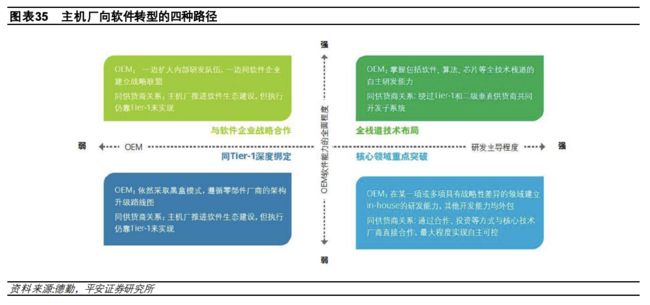 随着电子电气架构演进,从安全、数据、用户三个维度看主机厂的地位变化: 1) 电子架构向车云一体发展将使得智能车成为一个更加开放的智能触点,安全要求大幅提高,整车厂是第一责任体。 2) 选择辅助驾驶自研的主机厂,辅助驾驶功能将越用越好。随着辅助驾驶渐进式演进,越来越多原先做 L4 的算法公司开始与主机厂合作,这也说明有效里程产生的数据成为下一阶段辅助驾驶能力能否领先的关键点。 3) OEM 将在车辆全生命周期内实时直链用户,与 C端粘性显著增强,用户运营、远程诊断与服务将成主机厂基于存量车的业务触发点。 传统车企的 V 型研发模式(包含机械硬件测试、供应链协同、造型设计等)需要 5-7年的研发周期,无法适应移动服务的快速迭代和存量用户的运营。未来软硬件分离研发,在软件上变革为闭环开发模式,快速迭代,而硬件可提前预埋并在相当长时间保持原状。
随着电子电气架构演进,从安全、数据、用户三个维度看主机厂的地位变化: 1) 电子架构向车云一体发展将使得智能车成为一个更加开放的智能触点,安全要求大幅提高,整车厂是第一责任体。 2) 选择辅助驾驶自研的主机厂,辅助驾驶功能将越用越好。随着辅助驾驶渐进式演进,越来越多原先做 L4 的算法公司开始与主机厂合作,这也说明有效里程产生的数据成为下一阶段辅助驾驶能力能否领先的关键点。 3) OEM 将在车辆全生命周期内实时直链用户,与 C端粘性显著增强,用户运营、远程诊断与服务将成主机厂基于存量车的业务触发点。 传统车企的 V 型研发模式(包含机械硬件测试、供应链协同、造型设计等)需要 5-7年的研发周期,无法适应移动服务的快速迭代和存量用户的运营。未来软硬件分离研发,在软件上变革为闭环开发模式,快速迭代,而硬件可提前预埋并在相当长时间保持原状。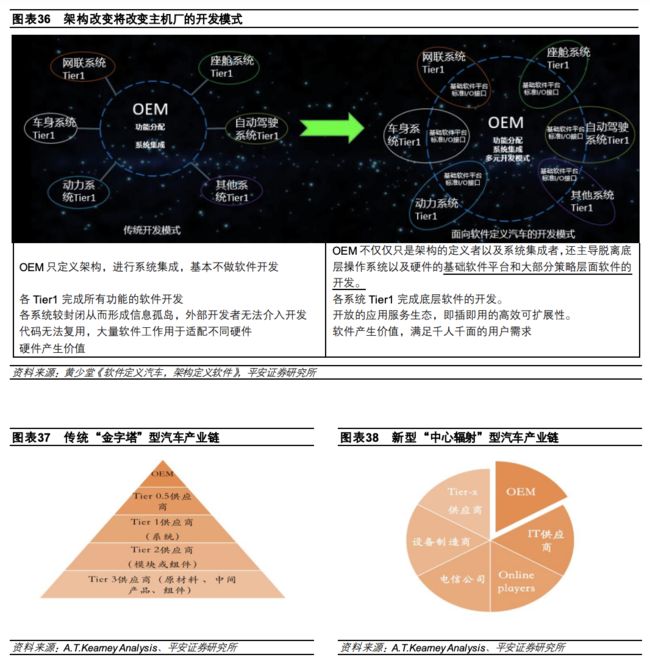 电子架构演进,改变主机厂组织架构: 马尔文康威 1967 提出的康威定律提出:一个组织设计出的系统/产品即该组织内部沟通结构的缩影。这意味着企业想要获得什么样的产品/系统,就需要什么样的组织及组织文化。 在分布式 ECU 时代,车企只需要做集成硬件即可完成产品生产交付;到了功能域控制器时代,软件从分布式 ECU 回收上移至功能域控制器,但各部门依然按照功能划分,比如划为智能座舱、智能驾驶和智能车控三个部门;功能域再往前演进,在中央计算平台时代,硬件完成大一统整合,软硬件开发解耦,软件与分层解耦,开发团队的调整不可避免,烟囱式的以功能划分的组织设计将被打破。因此近年来主机厂纷纷成立数字化中心、软件中心等新的组织,就是为了适应这种发展趋势。2021 年长城汽车形成“强后台、大中台、小前台”的 3.0 版本组织架构:强后台就是储备最优质、更前沿的技术,通过大量、前沿的预研投入保持领先。广义的后台除技术外,还包括机制质量、人力资源政策、战略布局和资本运作等内容;大中台在小前台的作战中,随时给予及时的补给和支援,以面向用户的小前台为核心,形成“一车一品牌一公司”的组织形态,打造出了若干个运营组织。目前看,车企都在通过各种组织创新以顺应电子电气架构演进趋势。
电子架构演进,改变主机厂组织架构: 马尔文康威 1967 提出的康威定律提出:一个组织设计出的系统/产品即该组织内部沟通结构的缩影。这意味着企业想要获得什么样的产品/系统,就需要什么样的组织及组织文化。 在分布式 ECU 时代,车企只需要做集成硬件即可完成产品生产交付;到了功能域控制器时代,软件从分布式 ECU 回收上移至功能域控制器,但各部门依然按照功能划分,比如划为智能座舱、智能驾驶和智能车控三个部门;功能域再往前演进,在中央计算平台时代,硬件完成大一统整合,软硬件开发解耦,软件与分层解耦,开发团队的调整不可避免,烟囱式的以功能划分的组织设计将被打破。因此近年来主机厂纷纷成立数字化中心、软件中心等新的组织,就是为了适应这种发展趋势。2021 年长城汽车形成“强后台、大中台、小前台”的 3.0 版本组织架构:强后台就是储备最优质、更前沿的技术,通过大量、前沿的预研投入保持领先。广义的后台除技术外,还包括机制质量、人力资源政策、战略布局和资本运作等内容;大中台在小前台的作战中,随时给予及时的补给和支援,以面向用户的小前台为核心,形成“一车一品牌一公司”的组织形态,打造出了若干个运营组织。目前看,车企都在通过各种组织创新以顺应电子电气架构演进趋势。 伴随着架构演进过程,车企的软件中心/科技公司/数字化中心需要大量研发投入:以大众软件公司 CARIAD为例,其计划自研 60%软件,聚焦于:1)电子电气架构 E³架构;2)VW.OS(大众汽车操作系统);3)VW.AC(大众汽车云);4)关键应用,目标是到 2025 年拥有 10000 名工程师。大众汽车计划每年投入 25-30 亿欧元于 CARIAD。电子架构演进,改变主机厂研发人才结构:未来车企在软件方面的研发人才占比将迅速上升,长城汽车 2021年中宣布:计划到 2023年全球研发人员将达 3万人,其中软件开发人才 1万人。对比新势力和传统车企的研发支出情况,我们可以明显看出新成立车企对软件研发的倾斜度更高,因为他们急需以“全栈自研”来形成差异化的特点以取得在全新赛道上的领先。因为研发人员平均支出高,研发支出绝对金额随着自研比例的上升呈大幅上升,比如蔚来汽车 2022 年研发支出指引为 90亿左右,与 2021 年长城汽车的研发支出规模相当。 目前国内一个车身控制器开发费为 1000 万+,据某主机厂电子电气架构总工程师预测,做一个全新的架构,把所有的控制器都开发到量产的状态,在软件 BUG比较少的情况下上市交付,至少得几十亿投入。再看各大主机厂软件中心的投入,一个软件开发人员的年度综合成本至少为 100 万元,假设软件队伍 1000 人,则一年人员投入为 10 亿,如果再加上工具链等其它相关投入,一年支出为 20 个亿。
伴随着架构演进过程,车企的软件中心/科技公司/数字化中心需要大量研发投入:以大众软件公司 CARIAD为例,其计划自研 60%软件,聚焦于:1)电子电气架构 E³架构;2)VW.OS(大众汽车操作系统);3)VW.AC(大众汽车云);4)关键应用,目标是到 2025 年拥有 10000 名工程师。大众汽车计划每年投入 25-30 亿欧元于 CARIAD。电子架构演进,改变主机厂研发人才结构:未来车企在软件方面的研发人才占比将迅速上升,长城汽车 2021年中宣布:计划到 2023年全球研发人员将达 3万人,其中软件开发人才 1万人。对比新势力和传统车企的研发支出情况,我们可以明显看出新成立车企对软件研发的倾斜度更高,因为他们急需以“全栈自研”来形成差异化的特点以取得在全新赛道上的领先。因为研发人员平均支出高,研发支出绝对金额随着自研比例的上升呈大幅上升,比如蔚来汽车 2022 年研发支出指引为 90亿左右,与 2021 年长城汽车的研发支出规模相当。 目前国内一个车身控制器开发费为 1000 万+,据某主机厂电子电气架构总工程师预测,做一个全新的架构,把所有的控制器都开发到量产的状态,在软件 BUG比较少的情况下上市交付,至少得几十亿投入。再看各大主机厂软件中心的投入,一个软件开发人员的年度综合成本至少为 100 万元,假设软件队伍 1000 人,则一年人员投入为 10 亿,如果再加上工具链等其它相关投入,一年支出为 20 个亿。 3.2
3.2
架构升级使得主机厂盈利模式多样化成为可能基于迈向中央计算的电子电气架构,主机厂原有盈利模式将被大幅拓宽。由于车企拥有大量移动终端,未来将拥有海量数据(涉及车身数据,环境数据,驾驶数据,车内人的各类数据),并可在全生命周期直达用户,据此可衍生出多类业务模式,如软件算法、虚拟司机、出行服务、运营平台、售后服务及诊断等;更长远地看,无人驾驶出现后,车辆出现的软件生态还拥有更广阔的想象空间。目前一些整车品牌已在进行车辆静止状态下的座舱创新,以激发并满足日益增加的娱乐、休憩等各类需求,这也使得车辆超越了单纯物理移动的意义,类似于智能手机早就超越了单纯的通信意义。 特斯拉车内已内置 22 种游戏,技术部门正努力将 steam 上的游戏库引入旗下车辆,未来特斯拉车机将支持流畅运行 steam。硬件上,2022 年特斯拉全系车辆将搭载 AMD Ryzen 芯片组,性能上媲美最新款的索尼游戏主机 Playstation5。随着内容生态的日渐丰富,未来汽车可能参与内容的分成,这可能成为一个空间巨大的收入来源。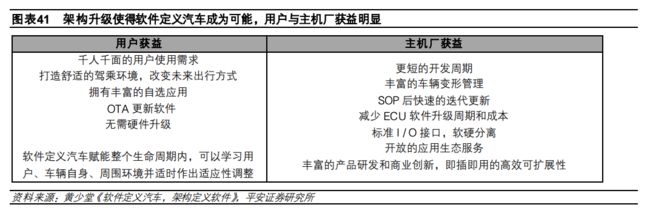
 在大众汽车 2030 NEW AUTO 战略中,大众描述了未来的汽车及其应用场景:未来的汽车将发展成为一个静修空间、移动办公室、居家旅行沙龙亦或小憩休整的场所,由于技术进步,汽车将逐渐褪去负面属性(事故、污染等),汽车将成为比现在更受欢迎的个人出行方式。 大众估计 2030 年汽车市场规模将达 5 万亿欧元,十倍于目前的智能手机市场规模,这主要是得益于软件和自动驾驶服务能力的提升。大众将在汽车业新未来形成新的商业模式,利润池由整车硬件、软件、电池与充电、移动出行解决方案构成。大众认为未来汽车依然是个性化的产品(以为顾客还是需要差异化的汽车外形、品牌和服务的),但与传统汽车时代相比,品牌的差异性将更多的来自于软件与服务。 大众汽车计划未来的利润池除了整车销售、整车平台出售、还包括软件外售、电池及补能服务、出行解决方案(算法外售、移动服务),面对消费者,服务可以按需付费激活,在此之前大众汽车将完成硬件平台的统一(即 SSP 平台)、统一的软件架构(电气架构 E3 2.0 版+VW.OS)。
在大众汽车 2030 NEW AUTO 战略中,大众描述了未来的汽车及其应用场景:未来的汽车将发展成为一个静修空间、移动办公室、居家旅行沙龙亦或小憩休整的场所,由于技术进步,汽车将逐渐褪去负面属性(事故、污染等),汽车将成为比现在更受欢迎的个人出行方式。 大众估计 2030 年汽车市场规模将达 5 万亿欧元,十倍于目前的智能手机市场规模,这主要是得益于软件和自动驾驶服务能力的提升。大众将在汽车业新未来形成新的商业模式,利润池由整车硬件、软件、电池与充电、移动出行解决方案构成。大众认为未来汽车依然是个性化的产品(以为顾客还是需要差异化的汽车外形、品牌和服务的),但与传统汽车时代相比,品牌的差异性将更多的来自于软件与服务。 大众汽车计划未来的利润池除了整车销售、整车平台出售、还包括软件外售、电池及补能服务、出行解决方案(算法外售、移动服务),面对消费者,服务可以按需付费激活,在此之前大众汽车将完成硬件平台的统一(即 SSP 平台)、统一的软件架构(电气架构 E3 2.0 版+VW.OS)。
 来源|焉知智能汽车
来源|焉知智能汽车
推荐阅读
Simulink模型架构指导
揭秘理想的整车电子电气架构
如何一步一步成为一个技术领域专家
谈谈Bootloader自更新
谈谈对两家AUTOSAR工具看法
奥迪首款800V车型技术总览
CAN设计与应用指南
汽车软件需求是如何变成用户功能?
电子电气架构设计需要考虑哪些方面?
汽车E/E架构的网络安全分析
电子电气架构设计需要考虑哪些方面?
一文搞懂AUTOSAR的DEM模块深度解读汽车域控制器谈谈在V模型流程中引入敏捷开发自动驾驶域控制器信息梳理自动驾驶中的路径规划汽车软件开发的下一个阶段是什么样的?深度分析整车控制域现状与发展
谈谈对汽车OTA的理解
小鹏P7内部ECU技术信息梳理