【标准解读】-GB 39732-2020《汽车事件数据记录系统EDR》
- 目的和意义
汽车事件数据记录系统(EDR)能够自动的记录车辆事件发生前后一段时间内的车辆运行和安全系统状态信息。EDR 的引入能够有效解决目前事故原因难以判断、事故责任鉴定困难的问题。该标准的制定能够对道路交通事故工作提供有效支撑,确保事故处理的公平公正,有利于创造良好有序的道路交通环境。同时该标准作为与 GB 7258 配套的强制性国家标准,具有非常重要的意义。
- 国内外标准差异
目前国际上的 EDR 标准法规主要是美国于 2008 年发布 CFR-49-563。该法规中包含了装配 EDR 的车辆的统一要求、数据元素记录要求、试验验证方法、数据提取以及产品使用说明书等有关内容。
我国标准 GB 39732—2020(以下简称国标) 与美国 CFR-49-563(以下简称 563)相比差异较大,因此给出了二者之间的主要区别:
- 范围:国标适用于安装了汽车事件数据记录系统的 M1 类车辆,563 适用于安装了汽车事件数据记录系统的 GVWR 不大于 3855 千克(8500 磅)或空载质量不大于 2495 千克(5,500 磅)的乘用车、多用途乘用车、卡车和客车。不适用步行式货车或设计专门销售给美国邮政服务的车辆。
- 事件起点和终点:当以 delta-V 作为判断条件时,国标为前闭后开区间,563 为前开后闭区间;国标还明确了气囊的二级(或更高级)点爆不应作为碰撞事件起点,也不应触发另一个 EDR 记录; 此外国标明确了特殊条件下,Tend 可被定义为最后记录的数据点的时刻。
- 触发阈值:当以 delta-V 作为判断条件时,国标为前闭后开区间,563 为前开后闭区间;国标允许制造商设置成其他触发阈值。
- 锁定条件:除 563 已经规定的不可逆约束装置展开作为锁定条件外,国标还明确了前碰时以 delta- V 作为锁定条件的要求,同时对后碰和侧碰时的锁定条件进行了明确。
- 数据元素:国标增加了事件时间、事件前同步计时时间、VIN 以及 EDR 有关编号,删除了垂向加速度、翻滚角、气囊展开状态、座位位置、乘员大小、乘员位置以及多次事件次数等元素,修改了车辆速度范围、达到最大记录纵向 delta-V 时间的最小准确度等内容。
- 记录功能:563 规定记录事件的次数为 2 次,国标为 3 次;国标还具体提出了锁定事件和非锁定事件要求,断电存储要求。
- 数据提取:国标提出了数据提取协议要求,规定了数据通讯协议、数据提取符号和数据转译格式要求等内容。
- 防护性能:国标提出了 EDR 安装在不同位置时,记录 EDR 数据的 EDR 控制器防护性能应能满足
GB/T 30038 规定的功能状
- 试验方法:国标给出了碰撞试验、驾驶操作数据试验和台架试验方法,以满足对于 EDR 记录要求和功能要求的验证需求,563 规定了在进行实车碰撞测试后,EDR 能够保存所记录的部分数据(除发动机相关数据),不对数据记录的准确度和分辨率进行验证。
- 国标给出了 EDR 控制器外观和标识的具体要求,保证 EDR 控制器的唯一性,防止被恶意的篡改。
- 国标给出了安装了 EDR 车辆的型式扩展要求,减少企业试验的负担。
3.标准条款解释
3.1 范围
本标准规定了M1类车辆的汽车事件数据记录系统的术语和定义、技术要求、试验方法和要求、外观和标识、车辆型式的扩展和说明书。
本标准适用于安装了汽车事件数据记录系统的M1类车辆。其他车辆可参考执行。
【条文理解】
本章规定标准的适用范围,适用的界限。
依据GB 7258—2017规定,乘用车应配备能记录碰撞等特定事件发生时的车辆行驶速度、制动状态等数据信息的事件数据记录系统(EDR),本标准适用于安装在M1类车辆上的汽车事件数据记录系统。对于其他类型车辆上的EDR系统,因没有强制标准要求,因此不受本标准的限定,可参考执行。
3.2 规范性引用文件
下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件,仅注日期的版本适用于本文件。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB 11551-2014 汽车正面碰撞的乘员保护
GB 14166 机动车乘员用安全带、约束系统、儿童约束系统和 ISOFIX 儿童约束系统GB 20071 汽车侧面碰撞的乘员保护
GB/T 20913 乘用车正面偏置碰撞的乘员保护
GB/T 30038 道路车辆 电气电子设备防护等级(IP代码) GB/T 34589-2017 道路车辆 诊断连接器
ISO 14229-1:2020 道路车辆 统一的诊断服务 第1部分:应用层(Road vehicles -- Unified diagnostic services (UDS) -- Part 1:Application Layer)
ISO 14230-1 道路车辆 基于关键词协议的诊断通信第1部分:物理层(Road vehicles -- Diagnostic communication over K-Line (DoK-Line) -- Part 1: Physical layer)
ISO 14230-2 道路车辆 诊断系统 基于K线的诊断通讯 第2部分:数据链路层(Road vehicles
-- Diagnostic communication over K-Line (DoK-Line) -- Part 2: Data link layer)
ISO 14230-3:1999 道路车辆 诊断系统 关键词协议2000 第3部分:应用层(Road vehicles
-- Diagnostic systems -- Keyword Protocol 2000 -- Part 3: Application layer)
ISO 15765-2:2016 道路车辆 基于控制器局域网络诊断(CAN)的诊断通信 第2部分:网络层服务(Road vehicles -- Diagnostic communication over Controller Area Network (DoCAN) -- Part 2: Transport protocol and network layer services)。
【条文理解】
本标准中引用的未带年代号的标准最新版本如下:
GB 14166—2013 机动车乘员用安全带、约束系统、儿童约束系统和 ISOFIX 儿童约束系统
GB 20071—2006 汽车侧面碰撞的乘员保护
GB/T 20913—2007 乘用车正面偏置碰撞的乘员保护
GB/T 30038—2013 道路车辆 电气电子设备防护等级(IP代码)。
※目前 GB 20071—2006 计划修订,实施中应注意标准最新版本的变化
4.术语和定义
GB 14166 界定的以及下列术语和定义适用于本文件。
4.1 碰撞事件 impact event
达到或超过触发阈值的碰撞或其他物理事件,或者其他任何导致不可逆约束装置展开的事件,以先
发生者为准。
【条文理解】
为避免重复,标准中提及的安全带、带扣、预紧装置等术语定义参考 GB 14166。
碰撞事件一般指车辆与车辆、车辆与行人、以及车辆与其他物体发生碰撞的物理事件。在车辆中一般通过加速度传感器来监测速度的变化,达到感知碰撞的发生的目的,但由于行驶中的加速和制动也会产生加速度,因此我们需要设定一定的条件(如阈值或气囊展开等),来区分是否为碰撞事件,并保证车辆能记录到相对严重的碰撞事件。
4.2 汽车事件数据记录系统 vehicle event data recorder system(EDR)
由一个或多个车载电子模块构成,具有监测、采集并记录碰撞事件发生前、发生时和发生后车辆和
乘员保护系统的数据功能的装置或系统。
4.3 EDR 控制器 EDR controller
用于监测、采集并记录碰撞事件发生过程中时间序列数据的车载电子模块。
【条文理解】
目前 EDR 功能的实现方式不同企业存在一定差异,有的集成在气囊控制器内部、有的通过单独电子部件实现、有的是分布在多个电子模块中。为便于理解,给出了汽车事件数据记录系统和 EDR 控制器的定义。EDR 系统指实现 EDR 功能的一个或多个部件,EDR 控制器是指用来进行数据采集、记录的电子模块。
4.4 横向加速度 lateral acceleration
车辆上某点的加速度矢量在 Y 轴方向上的分量。
注:当驾驶员坐在车内面向车辆行驶方向,从驾驶员角度看从左向右为横向加速度的正方向,见图 1。
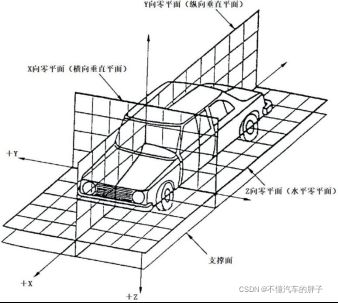
图 1 车辆坐标系
4.5 纵向加速度 longitudinal acceleration
车辆上某点的加速度矢量在 X 轴方向上的分量。
注:车辆向前行驶方向为纵向加速度的正方向,见图 1。
4.6 垂直加速度 normal acceleration
车辆上某点的加速度矢量在 Z 轴方向上的分量。
注:向下方向为垂直加速度的正方向,见图 1。
【条文理解】
因 EDR 记录的加速度、车辆速度等数据涉及方向问题,经查阅国内外相关标准中对于车辆坐标系的正负方向因适用场景不同存在一定差异性,如 GB/T 12673—2019 中描述的坐标系向上为正、向右为正、向后为正;ISO 8855—2011 中遵从向上右手法则,即向上为正、向左为正、向前为正;SAE J 670—2008 中给出了两种坐标系但均遵从右手法则(当向上法则:向上为正、向左为正、向前为正;向下右手法则:向下为正、向右为正、向前为正),因 EDR 记录的主要是车辆速度、加速度、速度变化量等车辆运动数据,充分考虑国内整车企业已经采用的坐标系方向,经与国内相关企业讨论,确定本标准中坐标系采用向下右手法则,即向下为正、向右为正、向前为正。
4.7 速度变化量 change in velocity delta-V
碰撞前车辆速度与碰撞后车辆速度的矢量差。delta-V 的计算公式为:
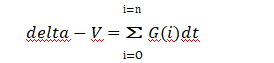
式中:
i——时间序列采样点序号;
G——加速度,用 g 表示(g=9.81m/s2)。
【条文理解】
delta-V 作为触发 EDR 记录的关键判断条件,标准中给出了 delta-V 的定义以及计算方法,即一段时间内加速度的累加量。
4.8 EDR 记录 EDR record
碰撞事件触发后,存储在一个或多个特定的记录 EDR 数据的 ECU 中的时间序列数据。
4.9 触发阈值 trigger threshold
达到 EDR 记录的条件。
4.10 锁定事件 locked event
满足锁定条件、不被后续事件覆盖的 EDR 记录的事件。
4.11 非锁定事件 unlocked event
不满足锁定条件,可被后续事件覆盖的 EDR 记录的事件。
4.12 时间零点 time zero
T0
EDR 系统确定的碰撞事件开始的时间点。
【条文理解】
EDR 记录可能为一个或多个事件数据(尤其是当多个碰撞事件间隔较短或者重叠的时候);国外标准法规中在定义里给出触发阈值和锁定条件的定义同时包含了具体要求,根据 GB/T 1.1 等有关标准编写规定,本标准将定义部分独立,相关要求放入技术要求章节。
4.13 保护系统 protection system
用来约束乘员的内部安装部件及装置。
[GB 11551-2014 ,定义 3.1]
4.14 乘员保护控制算法 occupant protection control algorithm
必要时激活乘员保护装置的碰撞感应逻辑,不是预碰撞感应逻辑。
【条文理解】
考虑到不同汽车对于安全气囊、安全气帘等成员保护系统的控制算法不同,同时对于唤醒和连续两种控制算法,碰撞事件起点和终点的要求不同,为便于标准理解和使用,标准给出了乘员保护控制算法的定义,同时明确了碰撞发生时的感应逻辑,不包括如碰撞预警等预碰撞感应的逻辑。
4.15 不可逆约束装置 non-reversible restraint
无法通过自动恢复或手动调整恢复至可再次使用状态的约束装置。
【条文理解】
不可逆约束装置一般包括气囊、预紧式安全带以及部分行人保护系统。明确不可逆约束装置定义, 主要是用于 EDR 厂商设计因气囊等部件激活展开确定的触发、锁定条件。
4.16 转译 translating
EDR 数据提取工具对 EDR 记录存储的数据进行转化,将其整合为可读报告。
4.17 EDR 数据提取工具 EDR data retrieval tool
由硬件和软件组成,满足以下功能,用于读取 EDR 记录数据的电子工具:
——与车辆上满足要求的连接器或与 EDR 控制器进行连接;
——读取 EDR 记录数据;
——可将未转译的二进制 EDR 记录进行鉴别,并将其形成文件存储到电脑中;
——打开并验证已存储、未转译且包含 EDR 记录的文件夹,将其转译为可读报告。
4.18 EDR 记录的提取 EDR record retrieval
EDR 数据提取工具对 EDR 记录的读取、转译和输出报告的过程。
4.19 EDR 记录报告 EDR record report
由 EDR 数据提取工具转译输出的包含车辆 EDR 记录的可读报告。
【条文理解】
为便于理解和使用 EDR 记录的数据和相关报告,给出上述定义。其中 EDR 数据提取工具应同时具有与 EDR 控制器连接、读取存储数据以及转译等功能。EDR 数据提取工具是进行试验结果判定和实现事故鉴定的重要工具,出于公安司法鉴定需要,本标准给出统一的数据读取接口、读取协议、读取 ID 和数据排列等内容,为 EDR 数据提取工具开发提供技术规范和指导,使司法鉴定部门能够在第一时间获得 EDR 记录的数据。
4.20 控制上限 upper control limits(UCL)
用来定义某一变量符合性测试的上限。
4.21 控制下限 lower control limits(LCL)
用来定义某一变量符合性测试的下限。
【条文理解】
为进行 delta-V 曲线的符合性判定(标准附录 C),给出上述定义。
5 技术要求
5.1 碰撞事件要求
5.1.1 触发阈值
车辆达到以下触发阈值条件时,该事件应被记录:
——当车辆仅记录“纵向delta-V”时,触发阈值为在 X 轴方向上 150ms 时间区间内不小于 8km/h
的车辆速度变化;
——当车辆同时记录“横向 delta-V”时,触发阈值为在 X 轴方向或者 Y 轴方向上 150 ms 时间区间
内不小于 8km/h 的车辆速度变化;
对于以上两种情况,如果事件持续时间小于 150ms,车辆速度变化不小于 8 km/h 时,即达到触发阈值。
5.1.2 锁定条件
EDR 系统应至少选择以下任意一项作为锁定条件,且事件数据不应被后续事件覆盖:
——不可逆约束装置展开;
——150ms 时间区间内在 X 轴方向上的车辆速度变化不小于 25 km/h。
发生后碰时,制造商可采用自行设定的控制算法作为锁定条件。发生侧碰时,应将侧面不可逆约束装置展开作为锁定条件,如果车辆未配备侧面不可逆约束装置,应由车辆制造商确定是否锁定。
【条文理解】
本条款是明确触发 EDR 记录数据以及记录锁定事件的条件。
对于触发阈值,根据车辆配置情况,分为横向、纵向两种情况,参考国际上已有标准对于该限值的规定,分别设定的不同速度变化量限值,并且以先到者为准。同时,为了给企业一定的自由度,允许企业在满足以上要求的前提下设置不同的触发条件,例如更低的限值或者不可逆约束装置展开等。
对于锁定条件,一般认为是比较严重的碰撞事件,综合考虑目前国内主流企业气囊点爆条件、实车碰撞时整车企业的标定以及 EDR 的实现策略等因素,确定纵向碰撞时 delta-V 的锁定限值。同时对于配备气囊的车辆,如果气囊已经点爆,一般为较为严重的事件,因此将气囊等不可逆约束装置展开作为另一锁定条件。后碰时,只有较少车辆装备了成员保护装置且加速度传感器数值在不同强度碰撞下存在一定差异,难以统一,因此标准中提出了后碰制造商可以根据车型技术特点和装备情况自行设定锁定条件。侧碰时,在车辆未配置不可逆约束装置(如侧气囊或气帘)情况,可以不设定侧碰锁定条件。
5.1.3 碰撞事件起点
碰撞事件起点(时间零点 T0)应满足以下任意一项要求,如图 2 所示:
- 对于使用“唤醒”乘员保护控制算法的系统,T0 为乘员保护控制算法被激活的时刻。
- 对于使用“连续运行”乘员保护控制算法的系统,T0 为前碰/后碰事件在 20ms 时间区间内,纵向累计 delta-V 最早不小于 0.8 km/h 的时刻;或侧碰事件在 5ms 时间区间内,横向累计 delta-V 最早不小于 0.8 km/h 的时刻。如表 1 所示。
- 一个不可逆约束装置展开的起始时刻。
- 如果 EDR 功能不由气囊控制器实现,则应以 b)条款作为碰撞事件起点。
- 气囊的二级(或更高级)点爆不应作为碰撞事件起点,也不应触发另一个 EDR 记录。
- 如果采用 c)作为碰撞事件起点,则不可逆约束装置展开前的碰撞事件数据也应被采集并记录。“唤醒”乘员保护控制算法,指乘员保护控制算法在满足一定条件被激活之后开始运行;“连续运行”
乘员保护控制算法,指乘员保护控制算法上电即开始运行。

注:该图不是按比例绘制,delta-V 和加速度数据根据碰撞方向可能为正值或负值。
图 2 碰撞事件常用参考数据点
表 1 每个碰撞事件起点的阈值(连续运行乘员保护控制算法)
| 项目 |
碰撞类型 |
||
| 前碰 |
侧碰 |
后碰 |
|
| 加速度的方向 |
纵向 |
横向 |
纵向 |
| 时间区间内 累计的速度变化 |
20ms 区间内 |
5ms 区间内 |
20ms 区间内 |
| ≤-0.8 km/h |
≥+0.8 km/h 或≤-0.8 km/h |
≥+0.8 km/h |
|
【条文理解】
根据不同车型乘员保护控制算法的差异,给出了不同的时间零点规定。对于采用激活算法的车型, 因不能够实时采集 delta-V 数据,无法通过判断 delta-V 大小确定时间零点,因此明确了算法激活时刻作为时间零点。对于连续运行算法的车型,考虑与现有国际标准法规的协调统一,采用在 20ms 时间区的最早 delta-V 不小于 0.8 km/h 的时刻作为激活时刻(对于前碰,均为减速运动,取≤-0.8 km/h 的时刻;
对于后碰,均为加速运动,取≥+0.8 km/h 的时刻;对于侧碰,因加减速都有可能存在,时间零点按照绝对值进行选取)。如车上装配了不可逆约束装置,也可以将该装置展开的起始时刻作为时间零点。如果 EDR 功能由独立的电子模块实现(EDR 不在气囊控制器内部),难以确定气囊点爆的准确时刻,应通过判断 delta-V 确定时间零点。对于多级气囊,二级(或更高级)气囊点爆,都在同一起事件当中, 且间隔较短,如果将其作为事件零点可能出现多个时间零点,造成重复或覆盖,不利于事故分析,因此标准中明确应将一级展开作为时间零点。
5.1.4 碰撞事件终点
碰撞事件终点(Tend)应满足以下要求:
- 对于“唤醒”乘员保护控制算法,Tend 为乘员保护控制算法自身重置的时刻。如果直至记录周期的终点,该条件还未满足,Tend 可被定义为最后记录的数据点的时刻。
- 对于“连续运行”乘员保护控制算法,Tend 为在 20ms 时间区间内,累计的纵向和横向(如果被记录)delta-V 最早小于 0.8 km/h 的时刻。如果直至记录周期的终点,该条件还未满足,Tend 可被定义为最后记录的数据点的时刻。
- 如果 EDR 功能不由气囊控制器实现,则应以 b)作为碰撞事件终点。
5.1.5 碰撞事件持续时间
碰撞事件持续时间为碰撞事件起点(T0)和碰撞事件终点(Tend)之间的时间区间。
注:碰撞事件的持续时间可能超过EDR的时间记录能力。
【条文理解】
对于唤醒算法,当其重置时即可认为一个事件结束,因此将其作为事件终点。对于在一个周期内, 数据已经全部记录,但算法仍未重置时,也可将最后一个数据记录点的时刻作为终点,实现资源最优化。对于连续控制算法,为与时间零点进行有效区分,取 delta-V 最早小于 0.8 km/h 的时刻作为终点,注意此处为了与 T0 区分,终点没有 delta-V 等于 0.8 km/h 的情况。当 EDR 功能不由气囊控制器实现的车型, 因没有乘员保护控制算法,则应以 delta-V 变化作为事件终点。
为表征一个完整事件,将事件终点与事件起点之间经过的时间记作时间持续时间。对于碰撞事件过程持续时间过长,有可能超过 EDR 的自身记录能力(如 EDR 记录能力为 250ms,事件持续时间 300ms;或因碰撞断电,EDR 只能记录断电后 150ms 的数据,但碰撞事件持续时间超过 150ms),标准中对此给予说明。
详细全文见以下链接,谢谢支持
【国标解读】-GB 39732-2020《汽车事件数据记录系统》 https://download.csdn.net/download/ChrisKKC/85088369
https://download.csdn.net/download/ChrisKKC/85088369
目录
GB 39732 《汽车事件记录系统》 解读
1. 目的和意义
2. 国内外标准差异
3. 标准条款解释
3.1 范围
3.2 规范性引用文件
4. 术语和定义
4.1 碰撞事件 impact event
3.2 汽车事件数据记录系统 vehicle event data recorder system(EDR)
3.3 EDR 控制器 EDR controller
3.4 横向加速度 lateral acceleration
5 技术要求
5.1 碰撞事件要求
5.1.1 触发阈值
5.1.2 锁定条件
5.1.3 碰撞事件起点
5.1.4 碰撞事件终点
5.1.5 碰撞事件持续时间
5.2 数据记录要求
5.3 EDR 记录功能要求
5.3.1 存储介质要求
5.3.2 EDR 触发要求
5.3.3 存储事件次数要求
5.3.4 存储覆盖机制要求
5.3.5 断电存储要求
5.4 数据提取要求
5.4.1 总体要求
5.4.2 数据提取端口要求
5.4.3 数据提取协议要求
5.4.4 数据提取符号要求
5.4.5 数据转译要求
5.4.6 存储期限要求
5.4.7 其他数据提取要求
5.5 防护性能要求
6 试验方法和要求
6.1 碰撞试验
6.2 驾驶操作数据试验
6.3 台架试验
7. 外观和标识
8. 车辆型式的扩展
8.1 总则
8.2 判定条件
8.2.1 整车生产企业相同。
8.2.2 EDR 控制器生产企业相同。
8.2.3 EDR 控制器型号相同。
8.2.4 对整车碰撞试验,还包括以下条件:
8.2.5 对驾驶操作数据试验,还包括以下条件:
8.2.6 对台架试验,允许软件编号不同,还包括以下条件:
9. 说明书
10. 标准实施
附 录 A(规范性附录) 数据元素格式
附 录 B(规范性附录) 数据元素排列
附 录 C(规范性附录)delta-V 曲线符合性判定
附 录 D(规范性附录) 台架试验冲击波形