牛顿法,高斯-牛顿法
牛顿法(Newton’s method)
假如已知函数 f ( x ) f(x) f(x),想要求 f ( x ) = 0 f(x)=0 f(x)=0 的解(或者叫根)。
牛顿法(Newton’s method)大致的思想是:
(1)选一个初始位置 x 0 x_0 x0(这个位置最好是在根的附近);
(2)在这个位置上找一个 f ( x ) f(x) f(x) 的近似函数(通常用泰勒展开);
(3)令近似函数为 0 0 0 ,求解;
(4)以这个解为新的位置 x 1 x_1 x1;
(5)重复上述迭代,到第 n n n 次迭代得到 x n x_n xn,当 ∣ x n − x n − 1 ∣ |x_n - x_{n-1}| ∣xn−xn−1∣ 足够小,结束。
x n x_n xn 就是 f ( x ) = 0 f(x)=0 f(x)=0 的近似解。
下面的解释1是一个比较直观的过程,不过问题的设计不太合理。解释2会好一点。
例子: 求 f ( x ) f(x) f(x) 的极小值。
解释1
假如 f ( x ) f(x) f(x) 长这样:

首先,选一个初始值估计值 x 0 x_0 x0,由于函数已知,带入得到对应的函数值为 f ( x 0 ) f(x_0) f(x0)。
由于函数在该点处可导,可以求得该点的导数为 f ′ ( x 0 ) f'(x_0) f′(x0)。
该点的导数值,就是该点的切线的斜率。
已知一个点和斜率,可以求得直线方程: y − f ( x 0 ) x − x 0 = f ′ ( x 0 ) ⇓ y = f ′ ( x 0 ) ( x − x 0 ) + f ( x 0 ) (1) \dfrac{y-f(x_0)}{x-x_0} = f'(x_0) \\ \Downarrow \\ y = f'(x_0)(x-x_0) + f(x_0) \tag{1} x−x0y−f(x0)=f′(x0)⇓y=f′(x0)(x−x0)+f(x0)(1)
公式(1)即为图中红色直线的方程,其中 x 0 x_0 x0, f ( x 0 ) f(x_0) f(x0), f ′ ( x 0 ) f'(x_0) f′(x0) 都是已知量。
现在,求红色直线与 x x x 轴的交点: x 1 x_1 x1 的值。
往公式(1)带入 y = 0 y=0 y=0 即可。
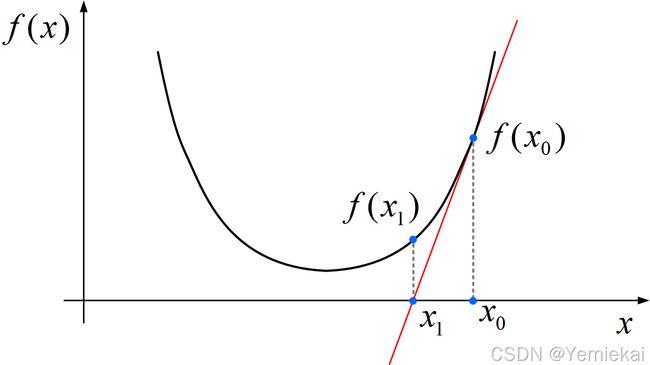
求得 x 1 = x 0 − f ( x 0 ) f ′ ( x 0 ) x_1 = x_0 - \frac{f(x_0)}{f'(x_0)} x1=x0−f′(x0)f(x0)
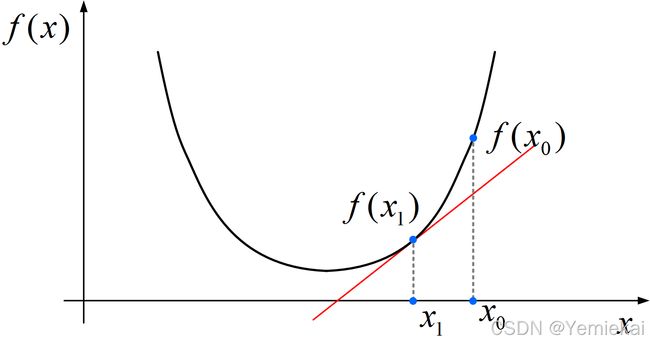
把 x 1 x_1 x1 代回原方程,得到对应的函数值 f ( x 1 ) f(x_1) f(x1)。在该点处继续求切线方程,重复上述步骤。
求直线与 x x x 轴的交点,得到 x 2 x_2 x2:
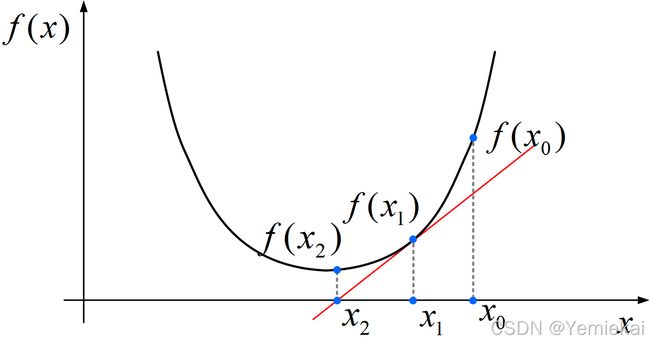
从图中可以看到, f ( x 2 ) f(x_2) f(x2) 已经几乎是极小值了。
实际操作中会判断两次迭代的差值 f ( x n ) − f ( x n − 1 ) f(x_n) - f(x_{n-1}) f(xn)−f(xn−1),如果足够小,就可以结束迭代了。
(这貌似有点像梯度下降)(对于这个问题直接求导数,令导数等于 0 0 0 也可以。)
我这个问题得设计好像有点 bug 。继续迭代会出问题, f ( x 2 ) f(x_2) f(x2) 处可能无法求导, x 3 x_3 x3 也不知道去到哪儿了。如果导数接近于 0 0 0 也可以结束迭代吧。
总之牛顿法的过程大概是这样。具体可以看百度百科或者其它资料。
贴一个维基百科的图:
像这个例子,是对这种 f ( x ) + a = 0 f(x)+a=0 f(x)+a=0 的问题用牛顿法。
解释2
来自知乎:https://zhuanlan.zhihu.com/p/103724149
一维情况
迭代公式:
x n + 1 = x n − f ′ ( x n ) f ′ ′ ( x n ) x_{n+1}=x_n - \dfrac{f'(x_n)}{f''(x_n)} xn+1=xn−f′′(xn)f′(xn)
牛顿法的推导基于二阶可微函数的泰勒展开,以一维函数为例,在 x 0 x_0 x0 处 f ( x ) f(x) f(x) 的泰勒展开:
f ( x ) ≈ f ( x 0 ) + f ′ ( x 0 ) ( x − x 0 ) + 1 2 f ′ ′ ( x 0 ) ( x − x 0 ) 2 \textcolor{#417991}{ f(x)} \approx \textcolor{#D97600}{f(x_0) + f'(x_0)(x-x_0) + \dfrac{1}{2} f''(x_0)(x-x_0)^2} f(x)≈f(x0)+f′(x0)(x−x0)+21f′′(x0)(x−x0)2
即在 x 0 x_0 x0 附近可以用 f ( x 0 ) + f ′ ( x 0 ) ( x − x 0 ) + 1 2 f ′ ′ ( x 0 ) ( x − x 0 ) 2 (2) \textcolor{#D97600}{f(x_0) + f'(x_0)(x-x_0) + \dfrac{1}{2} f''(x_0)(x-x_0)^2} \tag{2} f(x0)+f′(x0)(x−x0)+21f′′(x0)(x−x0)2(2) 近似替代 f ( x ) \textcolor{#417991}{f(x)} f(x)。
式子(2)是对 f ( x ) \textcolor{#417991}{f(x)} f(x) 在 x 0 x_0 x0 处的二阶近似,如下图橙色曲线:
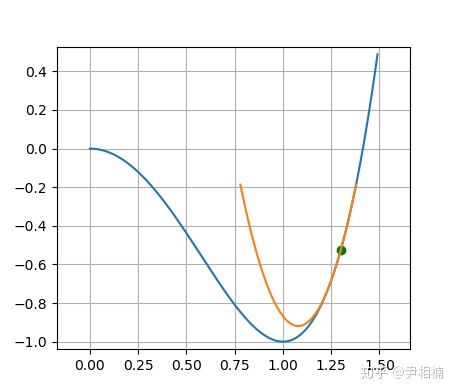
蓝色曲线代表原函数 f ( x ) \textcolor{#417991}{f(x)} f(x)。绿色点代表当前点 x 0 \textcolor{#007500}{x_0} x0。
对橙色曲线求导,求倒数的零点,得到下一次迭代的位置 x 1 x_1 x1。
也就是对式子(2)求导,得到: f ′ ( x 0 ) + f ′ ′ ( x 0 ) ( x − x 0 ) (3) f'(x_0) + f''(x_0)(x-x_0) \tag{3} f′(x0)+f′′(x0)(x−x0)(3)
然后令式子(3)等于 0 0 0,求得 x 1 = x 0 − f ′ ( x 0 ) f ′ ′ ( x 0 ) (4) x_1=x_0 - \dfrac{f'(x_0)}{f''(x_0)} \tag{4} x1=x0−f′′(x0)f′(x0)(4)
式子(4)即为一维函数的牛顿法迭代公式。
高维情况
迭代公式:
x n + 1 = x n − H ( x n ) − 1 ∇ f ( x n ) \boldsymbol{x}_{n+1} = \boldsymbol{x}_n - H(\boldsymbol{x}_n)^{-1} \nabla f(\boldsymbol{x}_n) xn+1=xn−H(xn)−1∇f(xn)
对于高维函数,推导过程基于多元函数的泰勒展开:
f ( x ) ≈ f ( x 0 ) + ∇ f ( x 0 ) T ⋅ ( x − x 0 ) + 1 2 ( x − x 0 ) T ⋅ H ( x 0 ) ⋅ ( x − x 0 ) (5) f(\boldsymbol{x}) \approx f(\boldsymbol{x}_0) + \nabla f(\boldsymbol{x}_0)^T \cdot (\boldsymbol{x} - \boldsymbol{x}_0) + \frac{1}{2} (\boldsymbol{x} - \boldsymbol{x}_0)^T \cdot H(\boldsymbol{x}_0) \cdot (\boldsymbol{x} - \boldsymbol{x}_0) \tag{5} f(x)≈f(x0)+∇f(x0)T⋅(x−x0)+21(x−x0)T⋅H(x0)⋅(x−x0)(5)
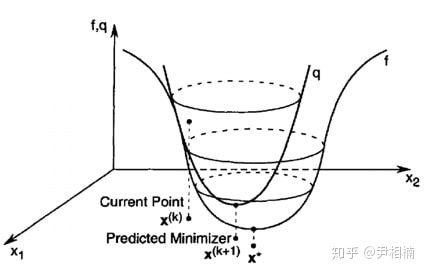
上面公式用高维二次曲面在 x 0 \boldsymbol{x}_0 x0 处逼近原函数。
用下面的图片表示类似的意思。( x 0 \boldsymbol{x}_0 x0 就是当前点,相当于图里面的 x ( k ) \textbf{x}^{(\text{k})} x(k) )
接下来,和一维的情况一样,令式子(5)右边的那部分对 x \boldsymbol{x} x 求导,令导数等于 0 0 0:
H ( x 0 ) ( x − x 0 ) + ∇ f ( x 0 ) = 0 (6) H(\boldsymbol{x}_0) (\boldsymbol{x} - \boldsymbol{x}_0) + \nabla f(\boldsymbol{x}_0) = 0 \tag{6} H(x0)(x−x0)+∇f(x0)=0(6)
解得 x 1 = x 0 − H ( x 0 ) − 1 ∇ f ( x 0 ) (7) \boldsymbol{x}_{1} = \boldsymbol{x}_0 - H(\boldsymbol{x}_0)^{-1} \nabla f(\boldsymbol{x}_0) \tag{7} x1=x0−H(x0)−1∇f(x0)(7)
其中 H H H 是 Hessian Matrix (海森矩阵),其实就是个二阶导的矩阵。
对于 n n n 元变量:
H ( f ) = [ ∂ 2 f ∂ x 1 2 ∂ 2 f ∂ x 1 ∂ x 2 ⋯ ∂ 2 f ∂ x 1 ∂ x n ∂ 2 f ∂ x 2 ∂ x 1 ∂ 2 f ∂ x 2 2 ⋯ ∂ 2 f ∂ x 2 ∂ x n ⋮ ⋮ ⋱ ⋮ ∂ 2 f ∂ x n ∂ x 1 ∂ 2 f ∂ x n ∂ x 2 ⋯ ∂ 2 f ∂ x n 2 ] H(f) = \begin{bmatrix} \dfrac{\partial^2 f}{\partial x_1^2} & \dfrac{\partial^2 f}{\partial x_1 \partial x_2} & \cdots & \dfrac{\partial^2 f}{\partial x_1 \partial x_n} \\[1.5em] \dfrac{\partial^2 f}{\partial x_2 \partial x_1} & \dfrac{\partial^2 f}{\partial x_2^2} & \cdots & \dfrac{\partial^2 f}{\partial x_2 \partial x_n} \\[1.5em] \vdots & \vdots & \ddots & \vdots \\[1.5em] \dfrac{\partial^2 f}{\partial x_n \partial x_1} & \dfrac{\partial^2 f}{\partial x_n \partial x_2} & \cdots & \dfrac{\partial^2 f}{\partial x_n^2} \end{bmatrix} \\[1.5em] H(f)=⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡∂x12∂2f∂x2∂x1∂2f⋮∂xn∂x1∂2f∂x1∂x2∂2f∂x22∂2f⋮∂xn∂x2∂2f⋯⋯⋱⋯∂x1∂xn∂2f∂x2∂xn∂2f⋮∂xn2∂2f⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤
牛顿法的优点是收敛速度快,缺点是需要求矩阵的逆,计算量比较大。
此外,如果矩阵非正定(在一维情况下表现为泰勒展开的二阶导数小于 0 0 0 ),极值点为极大值,而非极小值。
如果初始位置离最优点太远,也会导致迭代过程中目标函数不严格递减的情况。
解决这个问题的方法之一是拟牛顿法(Quasi-Newton Methods)。
高斯-牛顿法(Gauss–Newton algorithm)
介绍:
高斯-牛顿法(Gauss–Newton algorithm)是牛顿法的特例,它是牛顿法的修改版,用于寻找函数的最小值。
和牛顿法不一样,它只能用于解决最小二乘问题。
优点是,不需要二阶导数(二阶导数可能很难计算)。
例子:
设我们有 m m m 组样本(数据集): { ( x ( 1 ) , y ( 1 ) ) , ( x ( 2 ) , y ( 2 ) ) , … , ( x ( m ) , y ( m ) ) } , x ∈ R n \{ (\boldsymbol{x}^{(1)}, y^{(1)}), (\boldsymbol{x}^{(2)}, y^{(2)}), \dots, (\boldsymbol{x}^{(m)}, y^{(m)}) \} ,\; \; \boldsymbol{x}\in \mathbb{R}^n {(x(1),y(1)),(x(2),y(2)),…,(x(m),y(m))},x∈Rn 上标括号 ( ⋅ ) ^{(\cdot)} (⋅) 表示第几组样本(学吴恩达的表示法)。
我们希望找到包含 n n n 个参数的非线性函数 f ( x , θ ) f(\boldsymbol{x}, \boldsymbol{\theta}) f(x,θ),拟合上面 m m m 组数据。
其中 θ \boldsymbol{\theta} θ 是我们要找的参数, θ ∈ R n \boldsymbol{\theta} \in \mathbb{R}^n θ∈Rn。
为了方便描述,设代入第 i i i 个样本后,函数值为 f ( i ) ( θ ) f^{(i)}(\boldsymbol{\theta}) f(i)(θ) 。也就是 f ( i ) ( θ ) = f ( x ( i ) , θ ) f^{(i)}(\boldsymbol{\theta}) = f( \boldsymbol{x}^{(i)}, \boldsymbol{\theta} ) f(i)(θ)=f(x(i),θ)。
则最小二乘目标函数(或者叫平方误差函数?)为:
ϵ ( θ ) = ∑ i = 1 m ∥ f ( i ) ( θ ) − y ( i ) ∥ 2 (8) \epsilon (\boldsymbol{\theta}) = \sum_{i=1}^m \| f^{(i)}(\boldsymbol{\theta}) - y^{(i)} \| ^2 \tag{8} ϵ(θ)=i=1∑m∥f(i)(θ)−y(i)∥2(8)
(一般用 J J J 表示代价函数,但是这里用了 ϵ \epsilon ϵ,原因是稍后要用 J J J 表示雅可比矩阵)
我们需要找到一组参数 θ = [ θ 1 , θ 2 , … , θ n ] T \boldsymbol{\theta} = [\theta_1, \theta_2, \dots, \theta_n]^T θ=[θ1,θ2,…,θn]T,使式子(8)最小。也就是: arg min θ ϵ ( θ ) \arg\min_{\boldsymbol{\theta}} \epsilon(\boldsymbol{\theta}) argθminϵ(θ)
用式子(8)对第 j j j 个参数 θ j \theta_j θj 求导:
∂ ϵ ( θ ) θ j = ∑ i = 1 m 2 ⋅ ( f ( i ) ( θ ) − y ( i ) ) ⋅ ∂ f ( i ) ( θ ) ∂ θ j (9) \frac{\partial \epsilon(\boldsymbol{\theta}) }{ \theta_j } = \sum_{i=1}^m 2 \cdot \left( f^{(i)}(\boldsymbol{\theta}) - y^{(i)} \right) \cdot \frac{ \partial f^{(i)}(\boldsymbol{\theta}) }{ \partial \theta_j } \tag{9} θj∂ϵ(θ)=i=1∑m2⋅(f(i)(θ)−y(i))⋅∂θj∂f(i)(θ)(9)
令雅可比矩阵(jacobi matrix) J J J 为:
J = [ ∂ f ( 1 ) ( θ ) ∂ θ 1 ∂ f ( 1 ) ( θ ) ∂ θ 2 ⋯ ∂ f ( 1 ) ( θ ) ∂ θ n ∂ f ( 2 ) ( θ ) ∂ θ 1 ∂ f ( 2 ) ( θ ) ∂ θ 2 ⋯ ∂ f ( 2 ) ( θ ) ∂ θ n ⋮ ⋮ ⋱ ⋮ ∂ f ( m ) ( θ ) ∂ θ 1 ∂ f ( m ) ( θ ) ∂ θ 2 ⋯ ∂ f ( m ) ( θ ) ∂ θ n ] J= \begin{bmatrix} \dfrac{\partial f^{(1)}(\boldsymbol{\theta})}{\partial \theta_1} & \dfrac{\partial f^{(1)}(\boldsymbol{\theta}) }{\partial \theta_2} & \cdots & \dfrac{\partial f^{(1)}(\boldsymbol{\theta}) }{\partial \theta_n} \\[1.5em] \dfrac{\partial f^{(2)}(\boldsymbol{\theta})}{\partial \theta_1} & \dfrac{\partial f^{(2)}(\boldsymbol{\theta}) }{\partial \theta_2} & \cdots & \dfrac{\partial f^{(2)}(\boldsymbol{\theta}) }{\partial \theta_n} \\[1.5em] \vdots & \vdots & \ddots & \vdots \\[1.5em] \dfrac{\partial f^{(m)}(\boldsymbol{\theta})}{\partial \theta_1} & \dfrac{\partial f^{(m)}(\boldsymbol{\theta}) }{\partial \theta_2} & \cdots & \dfrac{\partial f^{(m)}(\boldsymbol{\theta}) }{\partial \theta_n} \end{bmatrix} J=⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎡∂θ1∂f(1)(θ)∂θ1∂f(2)(θ)⋮∂θ1∂f(m)(θ)∂θ2∂f(1)(θ)∂θ2∂f(2)(θ)⋮∂θ2∂f(m)(θ)⋯⋯⋱⋯∂θn∂f(1)(θ)∂θn∂f(2)(θ)⋮∂θn∂f(m)(θ)⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎤
所以 J J J 是一个 m m m 行 n n n 列的矩阵, m × n m\times n m×n。
第 1 1 1 行的含义为,第 1 1 1 个样本对于每个参数的偏导。
令残差(residual,样本与拟合值之间的差) r \textbf{r} r 为:
r = [ f ( 1 ) ( θ ) − y 1 f ( 2 ) ( θ ) − y 2 ⋮ f ( m ) ( θ ) − y m ] \textbf{r} = \begin{bmatrix} f^{(1)}(\boldsymbol{\theta}) -y_1 \\[0.5em] f^{(2)}(\boldsymbol{\theta}) -y_2 \\[0.5em] \vdots \\[0.5em] f^{(m)}(\boldsymbol{\theta}) -y_m \end{bmatrix} r=⎣⎢⎢⎢⎢⎢⎢⎡f(1)(θ)−y1f(2)(θ)−y2⋮f(m)(θ)−ym⎦⎥⎥⎥⎥⎥⎥⎤
则式子(9)可以写成矩阵形式:
∇ ϵ ( θ ) = 2 J T r (10) \nabla \epsilon(\boldsymbol{\theta}) = 2 J^T \textbf{r} \tag{10} ∇ϵ(θ)=2JTr(10)
接下来求海森矩阵第 k k k 行 j j j 列的元素:
∂ 2 ϵ ( θ ) ∂ θ k ∂ θ j = ∂ ∂ θ k ∂ ϵ ( θ ) ∂ θ j = ∂ ∂ θ k ( ∑ i = 1 m 2 ⋅ ( f ( i ) ( θ ) − y ( i ) ) ⋅ ∂ f ( i ) ( θ ) ∂ θ j ) = 2 ∑ i = 1 m ( f ( i ) ( θ ) ∂ θ k f ( i ) ( θ ) ∂ θ j + ( f ( i ) ( θ ) − y ( i ) ) ⋅ ∂ 2 f ( i ) ( θ ) ∂ θ k ∂ θ j ) (11) \begin{aligned} \frac{\partial ^2\epsilon(\boldsymbol{\theta})} { \partial \theta_k \partial \theta_j } &= \frac{\partial}{\partial \theta_k} \frac{\partial \epsilon(\boldsymbol{\theta})}{ \partial \theta_j} \\[1.5em] &=\frac{\partial}{\partial \theta_k} \left( \sum_{i=1}^m 2 \cdot \left( f^{(i)}(\boldsymbol{\theta}) - y^{(i)} \right) \cdot \frac{ \partial f^{(i)}(\boldsymbol{\theta}) }{ \partial \theta_j } \right)\\[1.5em] &= 2 \sum_{i=1}^m \left( \frac{ f^{(i)}(\boldsymbol{\theta}) }{ \partial \theta_k } \frac{ f^{(i)}(\boldsymbol{\theta}) }{ \partial \theta_j } + \left( f^{(i)}(\boldsymbol{\theta}) - y^{(i)} \right) \cdot \frac{\partial ^2 f^{(i)} (\boldsymbol{\theta})} { \partial \theta_k \partial \theta_j } \right) \\ \tag{11} \end{aligned} ∂θk∂θj∂2ϵ(θ)=∂θk∂∂θj∂ϵ(θ)=∂θk∂(i=1∑m2⋅(f(i)(θ)−y(i))⋅∂θj∂f(i)(θ))=2i=1∑m(∂θkf(i)(θ)∂θjf(i)(θ)+(f(i)(θ)−y(i))⋅∂θk∂θj∂2f(i)(θ))(11)
令 H H H 为 ϵ ( θ ) \epsilon(\boldsymbol{\theta}) ϵ(θ) 的海森矩阵,由(11)可知: H = 2 ⋅ ( J T J + S ) H= 2 \cdot (J^T J + S) H=2⋅(JTJ+S) 其中:
S k , j = ∑ i = 1 m ( f ( i ) ( θ ) − y ( i ) ) ⋅ ∂ 2 f ( i ) ( θ ) ∂ θ k ∂ θ j S_{k,j} = \sum_{i=1}^m \left( f^{(i)}(\boldsymbol{\theta}) - y^{(i)} \right) \cdot \frac{\partial ^2 f^{(i)} (\boldsymbol{\theta})} { \partial \theta_k \partial \theta_j } Sk,j=i=1∑m(f(i)(θ)−y(i))⋅∂θk∂θj∂2f(i)(θ)
把 (10) 和 (12) 带入 (7) 得:
θ n + 1 = θ n − H − 1 ∇ ϵ ( θ ) = θ n − ( J T J + S ) − 1 ⋅ J T r (13) \begin{aligned} \boldsymbol{\theta}_{n+1} & = \boldsymbol{\theta}_{n} - H^{-1} \nabla \epsilon(\boldsymbol{\theta}) \\ & = \boldsymbol{\theta}_n - \left( J^T J + S \right) ^{-1} \cdot \, J^T \textbf{r} \end{aligned} \tag{13} θn+1=θn−H−1∇ϵ(θ)=θn−(JTJ+S)−1⋅JTr(13)
很多时候 (13) 中的 S S S 可以忽略,最终高斯-牛顿法的迭代公式为:
θ n + 1 = θ n − ( J T J ) − 1 ⋅ J T r (14) \boldsymbol{\theta}_{n+1} = \boldsymbol{\theta}_n - \left( J^T J \right) ^{-1} \cdot \, J^T \textbf{r} \tag{14} θn+1=θn−(JTJ)−1⋅JTr(14)