三维空间直角坐标系转换(2)——改进七参数小旋转角的局限
前言:在之前的坐标系转换中,使用七参数模型只对小旋转角的坐标转换有作用,因此需要改进七参数模型,使其适应大旋转角,emm,我在这里借鉴了两位武大大佬的论文里的思路(武大不愧为测绘第一院校啊,人才真多),在这里引用一下。
[1]刘磊,何占国,郑作亚,贾传亮.大角度三维坐标转换参数的一种迭代解法[J].测绘科学,2021,46(06):65-69+76.DOI:10.16251/j.cnki.1009-2307.2021.06.010.
[2]姚宜斌,黄承猛,李程春,孔建.一种适用于大角度的三维坐标转换参数求解算法[J].武汉大学学报(信息科学版),2012,37(03):253-256.DOI:10.13203/j.whugis2012.03.008.
这里主要实现第一篇论文中的算法。
1.实现大旋转角度的思路
由于布尔沙七参数模型只适用与小旋转,因此在要适用大旋转角度只要修改旋转矩阵即可。在原文中,提出了由反对称矩阵构成的罗德里矩阵R代替七参数的旋转矩阵,并证明了该矩阵具有旋转矩阵的特征,具体公式大家可以看原文。
2.程序实现
代码如下。
import numpy as np
# 定义一个函数Large Angle coordinate conversion
def LACC(oldXYZ, newXYZ):
m = len(oldXYZ)
if m < 3:
print('少于三个点')
return
if len(oldXYZ) != len(newXYZ):
print('控制点坐标数量不同')
return
# 初值
k = 1
T = np.array([0, 0, 0]).reshape((3, 1))
a = b = c = 0
# 提取原、新坐标系坐标,方面调用
XA = np.array(oldXYZ)[:, 0]
YA = np.array(oldXYZ)[:, 1]
ZA = np.array(oldXYZ)[:, 2]
XB = np.array(newXYZ)[:, 0]
YB = np.array(newXYZ)[:, 1]
ZB = np.array(newXYZ)[:, 2]
# 权矩阵
P = np.eye(3 * m)
# 迭代参数差值的初值
dTx = dTy = dTz = 2
da = db = dc = 0.0001
dk = 0.0001
# 迭代,这里选择平移参数迭代差值小于1,旋转abc小于1e-5(作者原文为1e-8),k小于1e-5(原文1e-7)
while dTx > 1 or dTy > 1 or dTz > 1 or da > 0.00001 or db > 0.00001 or dc > 0.00001 or dk > 0.00001:
# 构造S,R矩阵
S = np.array([0, -float(c), -float(b), float(c), 0, -float(a), float(b), float(a), 0]).reshape((3, 3))
E = np.eye(3)
R = npmulti((E + S), np.linalg.inv(E - S))
# 构造B矩阵(3mx7)
# L矩阵(3mx1)
SE = npmulti(S, -1) + E
B1 = np.zeros((3 * m, 3))
B1[0:m, :] = SE[0, :]
B1[m:2 * m, :] = SE[1, :]
B1[2 * m:3 * m, :] = SE[2, :]
B2 = np.zeros((3 * m, 4))
L = np.zeros((3 * m, 1))
for i in range(0, m):
B2[i][1] = -k * ZA[i] - ZB[i] + T[2]
B2[i][2] = -k * YA[i] - YB[i] + T[1]
B2[i][3] = XA[i] - c * YA[i] - b * ZA[i]
B2[m + i][0] = -k * ZA[i] - ZB[i] + T[2]
B2[m + i][2] = k * XA[i] + XB[i] - T[0]
B2[m + i][3] = c * XA[i] + YA[i] - a * ZA[i]
B2[2 * m + i][0] = k * YA[i] + YB[i] - T[1]
B2[2 * m + i][1] = k * XA[i] + XB[i] - T[0]
B2[2 * m + i][3] = b * XA[i] + a * YA[i] + ZA[i]
L[i] = -(k * XA[i] - k * c * YA[i] - k * b * ZA[i] - XB[i] + T[0] - c * YB[i] + c * T[1] - b * ZB[i] + b *
T[2])
L[m + i] = -(
k * c * XA[i] + k * YA[i] - k * a * ZA[i] + c * XB[i] - c * T[0] - YB[i] + T[1] - a * ZB[i] + a * T[
2])
L[2 * m + i] = -(
k * b * XA[i] + k * a * YA[i] + k * ZA[i] + b * XB[i] - b * T[0] + a * YB[i] - a * T[1] - ZB[i] + T[
2])
B = np.c_[B1, B2]
# 求解法方程x=(Bnn-1)*W
Nbb = npmulti(B.T, P, B)
W = npmulti(B.T, P, L)
x = npmulti(np.linalg.inv(Nbb), W)
dTx, dTy, dTz, da, db, dc, dk = x[0:7]
T = T + np.array([float(dTx), float(dTy), float(dTz)]).reshape((3, 1))
a += da
b += db
c += dc
k += dk
return T, R, float(k)
# 自己写的一个函数,可以实现任意个矩阵相乘,前提条件第一个参数a为矩阵(写判断很麻烦,不如制定规则)
def npmulti(a, *par):
# a为矩阵
multi = a
for p in par:
if isinstance(p, np.ndarray):
multi = np.matmul(multi, p)
elif isinstance(p, int) or isinstance(p, float):
multi = np.dot(multi, p)
return multi
3.计算结果
这里选择原文中的5对点进行测试,代码如下。
if __name__ == '__main__':
oldXYZ = []
newXYZ = []
# 取原文中的5对点测试
oldXYZ.append((108521, 96611, 101222))
oldXYZ.append((108819, 99931, 101213))
oldXYZ.append((108379, 99937, 101438))
oldXYZ.append((108965, 101930, 101206))
oldXYZ.append((108302, 101930, 101583))
newXYZ.append((0, 0, 0))
newXYZ.append((289, 3327, 0))
newXYZ.append((-144, 3327, 216))
newXYZ.append((444, 5327, 0))
newXYZ.append((-222, 5327, 333))
# 可以输出T R k参数的值
T, R, k = LACC(oldXYZ, newXYZ)
# 计算原坐标在新坐标系下的坐标,以第一个点为例
XA = oldXYZ[0]
x = T + npmulti(R, np.array(XA).reshape((3, 1)), k)
print("T=", T, "\nR=", R, "\nk=", k)
print(x)
结果如下。
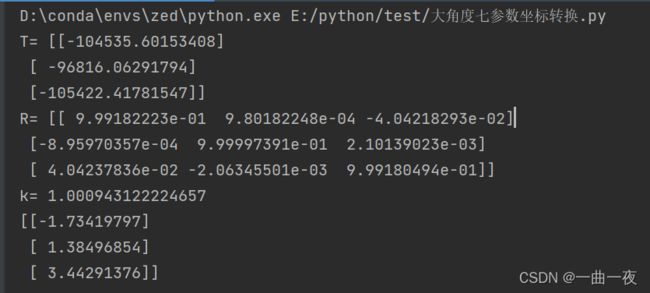
4.分析
首先,计算的矩阵与作者原文相似,但有差距,原因是控制点的个数不同,这里仅用了5个控制点,进行了3次迭代,同时使用5个点的单位权中误差也会大很多。
其次,计算的结果真实值为(0,0,0),第一个点的误差不大。当用其他点时,误差可能到达10mm甚至20mm,这就属于在那个点附近拟合精度差,要想提高精度只能加控制点了。
最后,emm,在摄影测量中,尽量能不转换坐标就不要转了,毕竟转换精度是一个问题。尽量用相对坐标就可以了。
坐标转换还有下一章。