MTCNN算法与代码理解—人脸检测和人脸对齐联合学习
MTCNN算法与代码理解—人脸检测和人脸对齐联合学习
写在前面
主页:https://kpzhang93.github.io/MTCNN_face_detection_alignment/index.html
论文:https://arxiv.org/abs/1604.02878
代码:官方matlab版、C++ caffe版
第三方训练代码:tensorflow、mxnet
MTCNN,恰如论文标题《Joint Face Detection and Alignment using Multi-task Cascaded Convolutional Networks》所言,采用级联CNN结构,通过多任务学习,同时完成了两个任务——人脸检测和人脸对齐,输出人脸的Bounding Box以及人脸的关键点(眼睛、鼻子、嘴)位置。
MTCNN 又好又快,提出时在FDDB、WIDER FACE和AFLW数据集上取得了当时(2016年4月)最好的结果,速度又快,现在仍被广泛使用作为人脸识别的前端,如InsightFace和facenet。
MTCNN效果为什么好,文中提了3个主要的原因:
-
精心设计的级联CNN架构(carefully designed cascaded CNNs architecture)
-
在线困难样本挖掘(online hard sample mining strategy)
-
人脸对齐联合学习(joint face alignment learning)
下面详细介绍。
算法Pipeline详解
总体而言,MTCNN方法可以概括为:图像金字塔+3阶段级联CNN,如下图所示
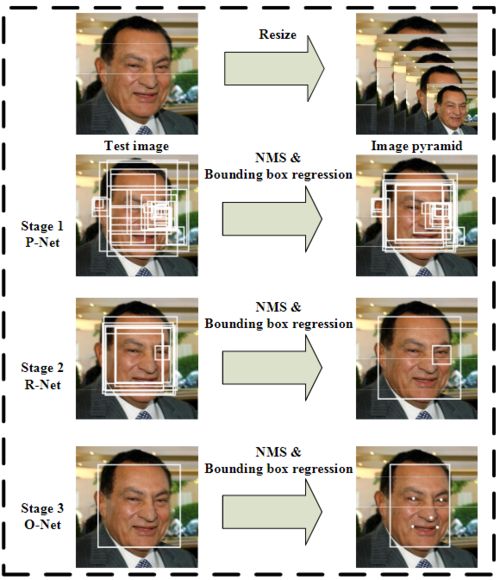
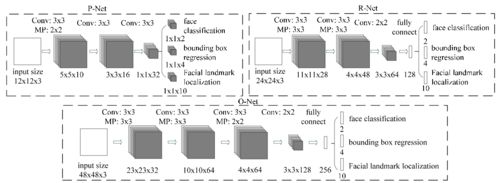
对输入图像建立金字塔是为了检测不同尺度的人脸,通过级联CNN完成对人脸 由粗到细(coarse-to-fine) 的检测,所谓级联指的是 前者的输出是后者的输入,前者往往先使用少量信息做个大致的判断,快速将不是人脸的区域剔除,剩下可能包含人脸的区域交给后面更复杂的网络,利用更多信息进一步筛选,这种由粗到细的方式在保证召回率的情况下可以大大提高筛选效率。下面为MTCNN中级联的3个网络(P-Net、R-Net、O-Net),可以看到它们的网络层数逐渐加深,输入图像的尺寸(感受野)在逐渐变大122448,最终输出的特征维数也在增加32128256,意味着利用的信息越来越多。
工作流程是怎样的?
首先,对原图通过双线性插值构建图像金字塔,可以参看前面的博文《人脸检测中,如何构建输入图像金字塔》。构建好金字塔后,将金字塔中的图像逐个输入给P-Net。
-
P-Net:其实是个全卷积神经网络(FCN),前向传播得到的特征图在每个位置是个32维的特征向量,用于判断每个位置处约12×1212×12大小的区域内是否包含人脸,如果包含人脸,则回归出人脸的Bounding Box,进一步获得Bounding Box对应到原图中的区域,通过NMS保留分数最高的Bounding box以及移除重叠区域过大的Bounding Box。
-
O-Net:是单纯的卷积神经网络(CNN),先将P-Net认为可能包含人脸的Bounding Box 双线性插值到24×2424×24,输入给O-Net,判断是否包含人脸,如果包含人脸,也回归出Bounding Box,同样经过NMS过滤。
-
R-Net:也是纯粹的卷积神经网络(CNN),将O-Net认为可能包含人脸的Bounding Box 双线性插值到48×4848×48,输入给R-Net,进行人脸检测和关键点提取。
需要注意的是:
-
face classification判断是不是人脸使用的是softmax,因此输出是2维的,一个代表是人脸,一个代表不是人脸
-
bounding box regression回归出的是bounding box左上角和右下角的偏移dx1,dy1,dx2,dy2dx1,dy1,dx2,dy2,因此是4维的
-
facial landmark localization回归出的是左眼、右眼、鼻子、左嘴角、右嘴角共5个点的位置,因此是10维的
-
在训练阶段,3个网络都会将关键点位置作为监督信号来引导网络的学习, 但在预测阶段,P-Net和R-Net仅做人脸检测,不输出关键点位置(因为这时人脸检测都是不准的),关键点位置仅在O-Net中输出。
-
Bounding box和关键点输出均为归一化后的相对坐标,Bounding Box是相对待检测区域(R-Net和O-Net是相对输入图像),归一化是相对坐标除以检测区域的宽高,关键点坐标是相对Bounding box的坐标,归一化是相对坐标除以Bounding box的宽高,这里先建立起初步的印象,具体可以参看后面准备训练数据部分和预测部分的代码细节。
MTCNN效果好的第1个原因是精心设计的级联CNN架构,其实,级联的思想早已有之,而使用级联CNN进行人脸检测的方法是在2015 CVPR《A convolutional neural network cascade for face detection》中被率先提出,MTCNN与之的差异在于:
-
减少卷积核数量(层内)
-
将5×55×5的卷积核替换为3×33×3
-
增加网络深度
这样使网络的表达能力更强,同时运行时间更少。
MTCNN效果好的后面2个原因在线困难样本挖掘和人脸对齐联合学习将在下一节介绍。
如何训练
损失函数
MTCNN的多任务学习有3个任务,1个分类2个回归,分别为face classification、bounding box regression以及facial landmark localization,分类的损失函数使用交叉熵损失,回归的损失函数使用欧氏距离损失,如下:
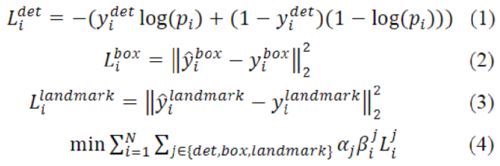
对于第ii个样本,LdetiLidet为判断是不是人脸的交叉熵损失,LboxiLibox为bounding box回归的欧式距离损失,LlandmarkiLilandmark为关键点定位的欧氏距离损失,任务间权重通过αjαj协调,配置如下:
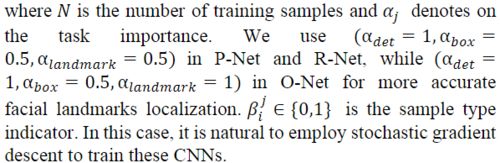
同时,训练数据中有含人脸的、有不含人脸的、有标注了关键点的、有没标注关键点的,不同数据能参与的训练任务不同,比如不含人脸的负样本自然无法用于训练bounding box回归和关键点定位,于是有了βji∈{0,1}βij∈{0,1},指示每个样本能参与的训练任务,例如对于不含人脸的负样本其βdeti=1,βboxi=0,βlandmarki=0βidet=1,βibox=0,βilandmark=0。
至此,我们已经清楚了MTCNN多任务学习的损失函数。
训练数据准备
MTCNN准备了4种训练数据:
-
Negatives:与ground-truth faces的IOU<0.3IOU<0.3的图像区域,
lable = 0 -
Positives:与ground-truth faces的IOU≥0.65IOU≥0.65的图像区域,
lable = 1 -
Part faces:与ground-truth faces的0.4≤IOU<0.650.4≤IOU<0.65的图像区域,
lable = -1 -
Landmark faces:标记了5个关键点的人脸图像,
lable = -2
这4种数据是如何组织的呢?以MTCNN-Tensorflow为例:
Since MTCNN is a Multi-task Network,we should pay attention to the format of training data.The format is:
[path to image] [cls_label] [bbox_label] [landmark_label]
For neg sample, cls_label=0, bbox_label=[0,0,0,0], landmark_label=[0,0,0,0,0,0,0,0,0,0].
For pos sample, cls_label=1, bbox_label(calculate),landmark_label=[0,0,0,0,0,0,0,0,0,0].
For part sample, cls_label=-1, bbox_label(calculate),landmark_label=[0,0,0,0,0,0,0,0,0,0].
For landmark sample, cls_label=-2, bbox_label=[0,0,0,0],landmark_label(calculate).
数量之比依次为3:1:1:23:1:1:2,其中,Negatives、Positives和Part faces通过WIDER FACE数据集crop得到,landmark faces通过CelebA数据集crop得到,先crop区域,然后看这个区域与哪个ground-truth face的IOU最大,根据最大IOU来生成label,比如小于0.3的标记为negative。
P-Net训练数据的准备可以参见gen_12net_data.py、gen_landmark_aug_12.py、gen_imglist_pnet.py和gen_PNet_tfrecords.py,代码很直观,这里略过crop过程,重点介绍bounding box label和landmark label的生成。下面是gen_12net_data.py和gen_landmark_aug_12.py中的代码片段,bounding box 和 landmark 的label为归一化后的相对坐标,offset_x1, offset_y1, offset_x2, offset_y2为bounding box的label,使用crop区域的size进行归一化,rv为landmark的label,使用bbox的宽高进行归一化,注意两者的归一化是不一样的,具体见代码:
## in gen_12net_data.py# pos and part face size [minsize*0.8,maxsize*1.25]size = npr.randint(int(min(w, h) * 0.8), np.ceil(1.25 * max(w, h)))# delta here is the offset of box centerif w<5: print (w) continue#print (box)delta_x = npr.randint(-w * 0.2, w * 0.2) delta_y = npr.randint(-h * 0.2, h * 0.2)#show this way: nx1 = max(x1+w/2-size/2+delta_x)# x1+ w/2 is the central point, then add offset , then deduct size/2# deduct size/2 to make sure that the right bottom corner will be out ofnx1 = int(max(x1 + w / 2 + delta_x - size / 2, 0))#show this way: ny1 = max(y1+h/2-size/2+delta_y)ny1 = int(max(y1 + h / 2 + delta_y - size / 2, 0)) nx2 = nx1 + size ny2 = ny1 + sizeif nx2 > width or ny2 > height: continue crop_box = np.array([nx1, ny1, nx2, ny2])#yu gt de offset##### x1 y1 x2 y2 为 ground truth bbox, nx1 ny1 nx2 ny2为crop的区域,size为crop的区域size ######offset_x1 = (x1 - nx1) / float(size) offset_y1 = (y1 - ny1) / float(size) offset_x2 = (x2 - nx2) / float(size) offset_y2 = (y2 - ny2) / float(size)#cropcropped_im = img[ny1 : ny2, nx1 : nx2, :]#resizeresized_im = cv2.resize(cropped_im, (12, 12), interpolation=cv2.INTER_LINEAR)############################################################################ in gen_landmark_aug_12.py#normalize land mark by dividing the width and height of the ground truth bounding box# landmakrGt is a list of tuplesfor index, one in enumerate(landmarkGt): # (( x - bbox.left)/ width of bounding box, (y - bbox.top)/ height of bounding box rv = ((one[0]-gt_box[0])/(gt_box[2]-gt_box[0]), (one[1]-gt_box[1])/(gt_box[3]-gt_box[1])) # put the normalized value into the new list landmark landmark[index] = rv
需要注意的是,对于P-Net,其为FCN,预测阶段输入图像可以为任意大小,但在训练阶段,使用的训练数据均被resize到12×1212×12,以便于控制正负样本的比例(避免数据不平衡)。
因为是级联结构,训练要分阶段依次进行,训练好P-Net后,用P-Net产生的候选区域来训练R-Net,训练好R-Net后,再生成训练数据来训练O-Net。P-Net训练好之后,根据其结果准备R-Net的训练数据,R-Net训练好之后,再准备O-Net的训练数据,过程是类似的,具体可以参见相关代码,这里就不赘述了。
多任务学习与在线困难样本挖掘
4种训练数据参与的训练任务如下:
-
Negatives和Positives用于训练face classification
-
Positives和Part faces用于训练bounding box regression
-
landmark faces用于训练facial landmark localization
据此来设置βjiβij,对每一个样本看其属于那种训练数据,对其能参与的任务将ββ置为1,不参与的置为0。
至于在线困难样本挖掘,仅在训练face/non-face classification时使用,具体做法是:对每个mini-batch的数据先通过前向传播,挑选损失最大的前70%作为困难样本,在反向传播时仅使用这70%困难样本产生的损失。文中的实验表明,这样做在FDDB数据级上可以带来1.5个点的性能提升。
具体怎么实现的?这里以MTCNN-Tensorflow / train_models / mtcnn_model.py代码为例,用label来指示是哪种数据,下面为代码,重点关注valid_inds和loss(square_error)的计算(对应βjiβij),以及cls_ohem中的困难样本挖掘。
# in mtcnn_model.py]# pos=1, neg=0, part=-1, landmark=-2# 通过cls_ohem, bbox_ohem, landmark_ohem来计算损失num_keep_radio = 0.7 # mini-batch前70%做为困难样本# face/non-face 损失,注意在线困难样本挖掘(前70%)def cls_ohem(cls_prob, label): zeros = tf.zeros_like(label) #label=-1 --> label=0net_factory #pos -> 1, neg -> 0, others -> 0 label_filter_invalid = tf.where(tf.less(label,0), zeros, label) num_cls_prob = tf.size(cls_prob) cls_prob_reshape = tf.reshape(cls_prob,[num_cls_prob,-1]) label_int = tf.cast(label_filter_invalid,tf.int32) # get the number of rows of class_prob num_row = tf.to_int32(cls_prob.get_shape()[0]) #row = [0,2,4.....] row = tf.range(num_row)*2 indices_ = row + label_int label_prob = tf.squeeze(tf.gather(cls_prob_reshape, indices_)) loss = -tf.log(label_prob+1e-10) zeros = tf.zeros_like(label_prob, dtype=tf.float32) ones = tf.ones_like(label_prob,dtype=tf.float32) # set pos and neg to be 1, rest to be 0 valid_inds = tf.where(label < zeros,zeros,ones) # get the number of POS and NEG examples num_valid = tf.reduce_sum(valid_inds) ###### 困难样本数量 ##### keep_num = tf.cast(num_valid*num_keep_radio,dtype=tf.int32) #FILTER OUT PART AND LANDMARK DATA loss = loss * valid_inds loss,_ = tf.nn.top_k(loss, k=keep_num) ##### 仅取困难样本反向传播 ##### return tf.reduce_mean(loss)# bounding box损失#label=1 or label=-1 then do regressiondef bbox_ohem(bbox_pred,bbox_target,label): ''' :param bbox_pred: :param bbox_target: :param label: class label :return: mean euclidean loss for all the pos and part examples ''' zeros_index = tf.zeros_like(label, dtype=tf.float32) ones_index = tf.ones_like(label,dtype=tf.float32) # keep pos and part examples valid_inds = tf.where(tf.equal(tf.abs(label), 1),ones_index,zeros_index) #(batch,) #calculate square sum square_error = tf.square(bbox_pred-bbox_target) square_error = tf.reduce_sum(square_error,axis=1) #keep_num scalar num_valid = tf.reduce_sum(valid_inds) #keep_num = tf.cast(num_valid*num_keep_radio,dtype=tf.int32) # count the number of pos and part examples keep_num = tf.cast(num_valid, dtype=tf.int32) #keep valid index square_error square_error = square_error*valid_inds # keep top k examples, k equals to the number of positive examples _, k_index = tf.nn.top_k(square_error, k=keep_num) square_error = tf.gather(square_error, k_index) return tf.reduce_mean(square_error)# 关键点损失def landmark_ohem(landmark_pred,landmark_target,label): ''' :param landmark_pred: :param landmark_target: :param label: :return: mean euclidean loss ''' #keep label =-2 then do landmark detection ones = tf.ones_like(label,dtype=tf.float32) zeros = tf.zeros_like(label,dtype=tf.float32) valid_inds = tf.where(tf.equal(label,-2),ones,zeros) ##### 将label=-2的置为1,其余为0 ##### square_error = tf.square(landmark_pred-landmark_target) square_error = tf.reduce_sum(square_error,axis=1) num_valid = tf.reduce_sum(valid_inds) #keep_num = tf.cast(num_valid*num_keep_radio,dtype=tf.int32) keep_num = tf.cast(num_valid, dtype=tf.int32) square_error = square_error*valid_inds # 在计算landmark_ohem损失时只计算beta=1的 ##### _, k_index = tf.nn.top_k(square_error, k=keep_num) square_error = tf.gather(square_error, k_index) return tf.reduce_mean(square_error)
多任务学习的代码片段如下:
# in train.pyif net == 'PNet': image_size = 12 radio_cls_loss = 1.0;radio_bbox_loss = 0.5;radio_landmark_loss = 0.5;elif net == 'RNet': image_size = 24 radio_cls_loss = 1.0;radio_bbox_loss = 0.5;radio_landmark_loss = 0.5;else: radio_cls_loss = 1.0;radio_bbox_loss = 0.5;radio_landmark_loss = 1; image_size = 48# ...# 多任务联合损失total_loss_op = radio_cls_loss*cls_loss_op + radio_bbox_loss*bbox_loss_op + radio_landmark_loss*landmark_loss_op + L2_loss_op train_op, lr_op = train_model(base_lr, total_loss_op, num)def train_model(base_lr, loss, data_num): """ train model :param base_lr: base learning rate :param loss: loss :param data_num: :return: train_op, lr_op """ lr_factor = 0.1 global_step = tf.Variable(0, trainable=False) #LR_EPOCH [8,14] #boundaried [num_batch,num_batch] boundaries = [int(epoch * data_num / config.BATCH_SIZE) for epoch in config.LR_EPOCH] #lr_values[0.01,0.001,0.0001,0.00001] lr_values = [base_lr * (lr_factor ** x) for x in range(0, len(config.LR_EPOCH) + 1)] #control learning rate lr_op = tf.train.piecewise_constant(global_step, boundaries, lr_values) optimizer = tf.train.MomentumOptimizer(lr_op, 0.9) train_op = optimizer.minimize(loss, global_step) return train_op, lr_op
以上对应论文中的损失函数。
预测过程
预测过程与算法Pipeline详解一节讲述的一致,直接看一下官方matlab代码,这里重点关注P-Net FCN是如何获得Bounding box的,以及O-Net最终是如何得到landmark的,其余部分省略。
将图像金字塔中的每张图像输入给P-Net,若当前输入图像尺寸为M×NM×N,在bounding box regression分支上将得到一个3维张量m×n×4m×n×4,共有m×nm×n个位置,每个位置对应输入图像中一个12×1212×12的区域,而输入图像相对原图的尺度为scale,进一步可以获得每个位置对应到原图中的区域范围,如下所示:
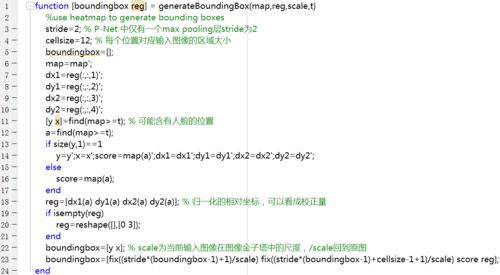
而每个位置处都有个44维的向量,其为bounding box左上角和右下角的偏移dx1, dy1, dx2, dy2,通过上面的训练过程,我们知道它们是归一化之后的相对坐标,通过对应的区域以及归一化后的相对坐标就可以获得原图上的bounding box,如下所示,dx1, dy1, dx2, dy2为归一化的相对坐标,求到原图中的bounding box坐标的过程为生成训练数据bounding box label的逆过程。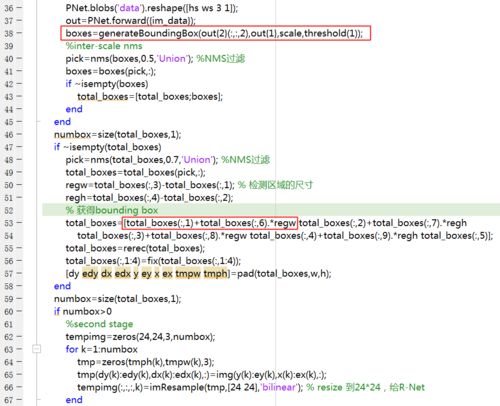
landmark位置通过O-Net输出得到,将人脸候选框resize到48×4848×48输入给O-Net,先获得bounding box(同上),因为O-Net输出的landmark也是归一化后的相对坐标,通过bounding box的长宽和bounding box左上角求取landmark 在原图中的位置,如下所示:
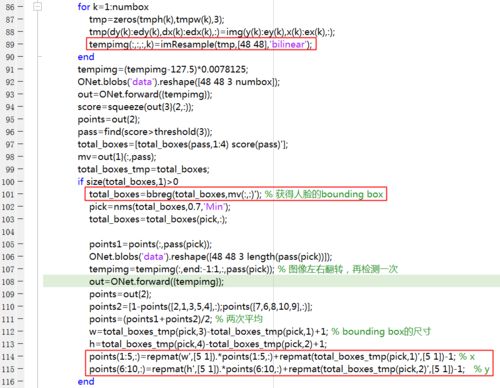
至此,预测过程中的要点也介绍完毕了,以上。
参考
-
Joint Face Detection and Alignment using Multi-task Cascaded Convolutional Networks
-
官方matlab code
-
第三方tensorflow code
原文出处:https://www.cnblogs.com/shine-lee/p/10115582.html
算法