【opencv学习笔记】003之图像像素基本操作(获取像素指针、范围处理)及掩膜操作(filter2D)详解
目录
一、前言
二、图像像素基本操作
1、获取图像像素指针
1.获取图像像素指针是什么?
2.相应API
3.获取目的
2、像素范围处理saturate_cast
1.像素范围处理是什么?
2.像素范围处理API
3、掩膜操作
1.掩膜是什么?
2.掩膜操作是什么?
3.掩膜操作的作用?
4.API
三、全部代码及结果展示
1、代码
2、运行效果图
一、前言
欠下的总是要还的,继续给大家更新有关于OpenCV的教程,很久没给大家更新,希望能得到大家的谅解。
今天要讲的是图像像素比较简单的几个基本操作,包括图像矩阵的掩膜操作,获取像素的指针、图像像素范围处理以filter2D的介绍。
图像处理很大程度上是对像素的处理,通过对比像素,修改像素,可以实现降噪、平滑、检测等功能。
二、图像像素基本操作
1、获取图像像素指针
1.获取图像像素指针是什么?
二维图像保存在电脑中,大家可以理解为矩阵,一个二维数组,每个位置都会有一个像素值。
访问像素值,就是访问二维数组中某个位置的值。
2.相应API
访问的时候,我们先访问行,后访问列,通过如下方式,我们获取行指针,索引i表示第几行,从0开始计行数。
Mat.ptr(int i=0) //获取像素矩阵的指针,索引i表示第几行,从0开始计行数。 我们通过行指针,可以获取到该行的的所有点,即所有像素。
const uchar* current= myImage.ptr(row); //获得当前行指针
p(row, col) =current[col] //获取当前像素点P(row, col)的像素值。
3.获取目的
获取到像素点,我们就可以对这个像素点进行操作,如果我们加上循环嵌套,还可以遍历所有的像素点,即对所有的像素点进行操作。
2、像素范围处理saturate_cast
1.像素范围处理是什么?
我们在设置图像像素的灰度值或者RGB值时候,如果不了解,会随意设置,以RGB为例,他们的取值范围是从0 到255,所以如果我们输入范围以外的数据,为防止程序出错,我们需要控制范围,保证我们输入非法数据时候,不会导致程序出现问题。
处理的原则如下:
如果我们输入小于0的值,它会返回0,
如果我们输入大于255的值,它会返回255,
如果我们输入0-255之间的值,它会正常返回。
2.像素范围处理API
像素范围处理的API是saturate_cast
saturate_cast(-100) //返回 0
saturate_cast(288) //返回255
saturate_cast(100) //返回100 3、掩膜操作
1.掩膜是什么?
在讲掩膜操作之前,先给大家说一下什么是掩膜。
我们不考虑别的地方什么是掩膜,我也不会给大家讲掩膜的标准定义,我们既然说图像的掩膜操作,那么我们就说在图像掩膜操作中的这个掩膜到底是什么。
这个掩膜就是一个n*n的矩阵。通过掩膜去遍历图像,
 图像与掩膜
图像与掩膜
2.掩膜操作是什么?
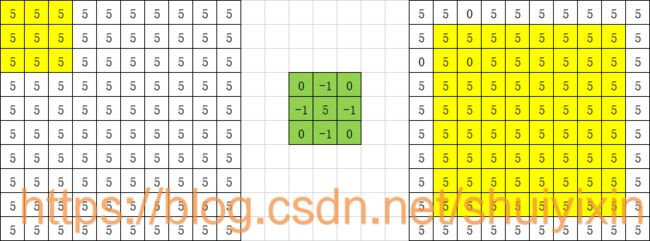
接下来我们讲掩膜操作,我们用数字模拟一个图像,左边是一个10*10的图像矩阵,右边是一个掩膜,他们两个做操作。
首先,左边黄色的3*3方块与掩膜对应位置相乘,求得的值,存放在新图像上的对应于原图上的中心位置的中间的位置。就像下图一样:
下图的操作是:
5 * 0 + 5 * (-1) + 5 * 0 + 5 * (-1) + 5 * 5 + 5 * (-1) + 5 * 0 + 5 * (-1) + 5 * 0 = 5
 掩膜操作
掩膜操作
由于图像所有都是5,所以上面这个经过掩膜操作并没有什么太明显的变化。
 全部做掩膜操作
全部做掩膜操作
做完掩膜操作,边上的像素是做不到的,对于不同的算法,边上的像素做法不同,在这里先不说,以后会给大家详细讲解。
我们再看一个示例:
 全部做掩膜操作
全部做掩膜操作
对于外层一圈,不同算法不同,有的算法是将最外层全部设为0,有的是设为与其距离最近的像素点一致,有的是在原图外层加一层,这样经过掩膜的图像就是与原图一样尺寸了。
3.掩膜操作的作用?
掩膜操作实现图像对比度调整。
4.API
掩膜操作的API是filter2D,函数原型是:
void filter2D(
InputArray src,
OutputArray dst,
int ddepth,
InputArray kernel,
Point anchor = Point(-1,-1),
double delta = 0,
int borderType = BORDER_DEFAULT
);函数参数含义如下:
(1)InputArray类型的src ,输入图像。
(2)OutputArray类型的dst ,输出图像,图像的大小、通道数和输入图像相同。
(3)int类型的ddepth,目标图像的所需深度。
(4)InputArray类型的kernel,卷积核(或者更确切地说是相关核)是一种单通道浮点矩阵;如果要将不同的核应用于不同的通道,请使用split将图像分割成不同的颜色平面,并分别对其进行处理。。
(5)Point类型的anchor,表示锚点(即被平滑的那个点),注意他有默认值Point(-1,-1)。如果这个点坐标是负值的话,就表示取核的中心为锚点,所以默认值Point(-1,-1)表示这个锚点在核的中心。。
(6)double类型的delta,在将筛选的像素存储到dst中之前添加到这些像素的可选值。说的有点专业了其实就是给所选的像素值添加一个值delta。
(7)int类型的borderType,用于推断图像外部像素的某种边界模式。有默认值BORDER_DEFAULT。
如下面这个例子:
filter2D( src, dst, src.depth(), kernel );
三、全部代码及结果展示
1、代码
#include
#include
#include
using namespace cv;
int main(int argc, char** argv) {
Mat src, dst;
src = imread("D:/hand.png");
if (!src.data) {
printf("could not load image...\n");
return -1;
}
/*
int cols = (src.cols-1) * src.channels();
int offsetx = src.channels();
int rows = src.rows;
dst = Mat::zeros(src.size(), src.type());
for (int row = 1; row < (rows - 1); row++) {
const uchar* previous = src.ptr(row - 1);
const uchar* current = src.ptr(row);
const uchar* next = src.ptr(row + 1);
uchar* output = dst.ptr(row);
for (int col = offsetx; col < cols; col++) {
output[col] = saturate_cast(5 * current[col] - (current[col- offsetx] + current[col+ offsetx] + previous[col] + next[col]));
}
}
*/
double t = getTickCount();
Mat kernel = (Mat_(3, 3) << 0, -1, 0, -1, 5, -1, 0, -1, 0);
filter2D(src, dst, src.depth(), kernel);
double timeconsume = (getTickCount() - t) / getTickFrequency();
printf("tim consume %.2f\n", timeconsume);
imshow("input image", src);
imshow("contrast image demo", dst);
waitKey(0);
return 0;
} 2、运行效果图
 原图
原图
 掩膜操作后的图像
掩膜操作后的图像
今天的内容就讲到这里啦,有什么问题,大家可以在下面留言哦!