dsp复习笔记(奥本海姆离散时间信号处理)
dsp复习
文章目录
- dsp复习
-
- 连续时间信号的采样
-
- 周期采样
- 采样的频域表示
- 由样本重构带限信号
- 连续时间信号的离散时间处理
- 脉冲响应不变
- 离散时间信号的连续时间处理
- 降采样
- 升采样
- 采样率按非整数因子变换
- 线性时不变系统的变换分析
-
- LTI系统的频率响应
-
- 理想选频滤波器
- 群延迟
- 线性常系数差分方程表征的系统函数
-
- 逆系统
- IIR和FIR
- 幅度与相位之间的关系
-
- 全通系统
- 最小相位系统
-
- 最小相位和全通分解
- 频率响应的补偿
- 最小相位系统的性质
- 广义线性相位的线性系统
-
- 线性相位系统
- 广义线性相位
- 因果广义线性相位系统
- 离散时间系统结构
-
- 方框图表示
- IIR
- FIR
- 滤波器设计方法
-
- 脉冲响应不变法
- 双线性变换法
- 窗函数法
- 离散傅里叶变换
-
- 离散傅里叶级数
- 离散傅里叶级数的性质
- 周期信号
- 有限长序列的离散傅里叶变换
- 离散傅里叶变换的性质
- 离散傅里叶变换实现线性卷积
- DFT实现LTI系统
- 离散傅里叶变换的计算(FFT)
-
- 按时间抽取的FFT算法
- 按频率抽取的FFT算法
- 利用离散傅里叶变换的信号傅里叶分析
连续时间信号的采样
周期采样
x [ n ] = x c ( n T ) x[n]=x_c(nT) x[n]=xc(nT)
采样的频域表示
X s ( j Ω ) = 1 T s ∑ k = − ∞ + ∞ X c ( j Ω − k j Ω s ) X_s(j\Omega)=\frac{1}{T_s}\sum_{k=-\infty}^{+\infty}X_c(j\Omega-kj\Omega_s) Xs(jΩ)=Ts1∑k=−∞+∞Xc(jΩ−kjΩs)
不发生混叠的条件: Ω s > 2 Ω N \Omega_s>2\Omega_N Ωs>2ΩN
采样信号的恢复:一个增益为T的理想滤波器,且满足 Ω N < Ω c < Ω s − Ω N \Omega_N<\Omega_c<\Omega_s-\Omega_N ΩN<Ωc<Ωs−ΩN
奈奎斯特率: 2 Ω N 2\Omega_N 2ΩN
离散频率与连续频率的映射关系: ω = Ω T \omega=\Omega T ω=ΩT
由样本重构带限信号
假定 Ω c = Ω s 2 = π T \Omega_c=\frac{\Omega_s}{2}=\frac{\pi}{T} Ωc=2Ωs=Tπ
重构滤波器: h r ( t ) = s i n π t T π t T h_r(t)=\frac{sin\frac{\pi t}{T}}{\frac{\pi t}{T}} hr(t)=TπtsinTπt
重构信号在各采样时刻点与原连续信号有着相同的值
连续时间信号的离散时间处理
H e f f ( j Ω ) = H ( e j Ω T ) H_{eff}(j\Omega)=H(e^{j\Omega T }) Heff(jΩ)=H(ejΩT) ∣ Ω ∣ < π T |\Omega|<\frac{\pi}{T} ∣Ω∣<Tπ
脉冲响应不变
h [ n ] = T h c ( n T ) h[n]=Th_c(nT) h[n]=Thc(nT)
H ( e j ω ) = T H ( j ω T ) H(e^{j\omega})=TH(\frac{j\omega}{T}) H(ejω)=TH(Tjω) ∣ ω ∣ ≤ π |\omega|\le\pi ∣ω∣≤π
离散时间信号的连续时间处理
实际使用较少,一般用在非整数延迟
H ( e j ω ) = H c ( j ω T ) H(e^{j\omega})=H_c(j\frac{\omega}{T}) H(ejω)=Hc(jTω) ∣ ω ∣ ≤ π |\omega|\le\pi ∣ω∣≤π
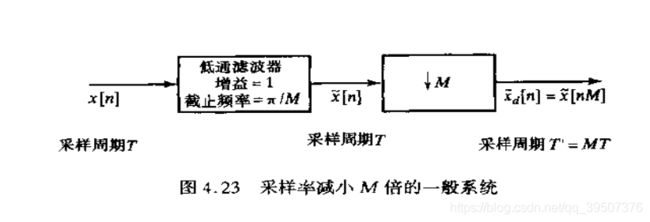
降采样
M倍降采样: X d ( e j ω ) = 1 M ∑ i = 0 M − 1 X ( e j ( ω − 2 π i M ) ) X_d(e^{j\omega})=\frac{1}{M}\sum_{i=0}^{M-1}X(e^{j(\frac{\omega-2\pi i}{M})}) Xd(ejω)=M1∑i=0M−1X(ej(Mω−2πi))
需满足 ω N M < π \omega_NM<\pi ωNM<π,否则就会混叠
需要在降采样操作前加一个离散时间滤波器
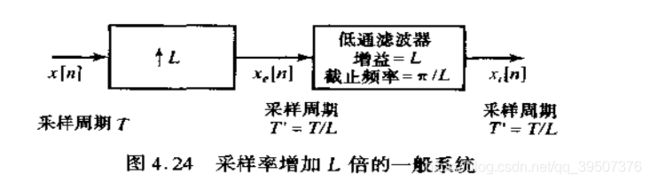
升采样
X e ( e j ω ) = X ( e j ω L ) X_e(e^{j\omega})=X(e^{j\omega L}) Xe(ejω)=X(ejωL)
升采样会产生镜像
镜像滤波器:增益为L,截止频率 π L \frac{\pi}{L} Lπ
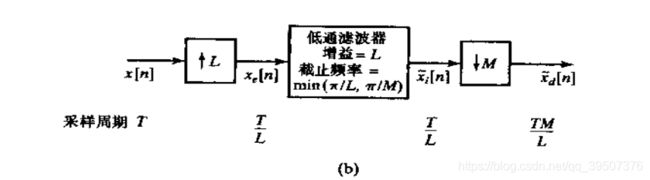
采样率按非整数因子变换
线性时不变系统的变换分析
LTI系统的频率响应
Y ( e j ω ) = H ( e j ω ) X ( e j ω ) Y(e^{j\omega})=H(e^{j\omega})X(e^{j\omega}) Y(ejω)=H(ejω)X(ejω)
幅度和相位满足:
∣ Y ( e j ω ) ∣ = ∣ H ( e j ω ) ∣ ∣ X ( e j ω ) ∣ |Y(e^{j\omega})|=|H(e^{j\omega})||X(e^{j\omega})| ∣Y(ejω)∣=∣H(ejω)∣∣X(ejω)∣
a r g Y ( e j ω ) = a r g H ( e j ω ) + a r g X ( e j ω ) arg Y(e^{j\omega})=arg H(e^{j\omega}) +argX(e^{j\omega}) argY(ejω)=argH(ejω)+argX(ejω)
理想选频滤波器
LPF: h [ n ] = s i n ω c n π n h[n]=\frac{sin\omega_c n}{\pi n} h[n]=πnsinωcn
HPF: h [ n ] = δ [ n ] − s i n ω c n π n h[n]=\delta[n]-\frac{sin\omega_c n}{\pi n} h[n]=δ[n]−πnsinωcn
群延迟
τ ( w ) = − d d ω g r d [ H ( e j ω ) ] \tau(w)=-\frac{d}{d\omega}{grd[H(e^{j\omega})]} τ(w)=−dωdgrd[H(ejω)]
线性常系数差分方程表征的系统函数
稳定性:收敛域包括单位圆
因果性:右边序列
逆系统
H i ( z ) = 1 H ( z ) H_i(z)=\frac{1}{H(z)} Hi(z)=H(z)1
逆系统的收敛域必须与原系统有公共部分
如果要求因果稳定系统的逆系统也因果稳定,则所有的零点和极点都必须在单位圆内(最小相位系统)
IIR和FIR
IIR系统:H(z)至少有一个非零极点
FIR系统:没有0和无穷以外的极点
幅度与相位之间的关系
∣ H ( e j ω ) ∣ 2 = H ( e j ω ) H ∗ ( e j ω ) = H ( z ) H ∗ ( 1 z ∗ ) |H(e^{j\omega})|^2=H(e^{j\omega})H^*(e^{j\omega})=H(z)H^*(\frac{1}{z^*}) ∣H(ejω)∣2=H(ejω)H∗(ejω)=H(z)H∗(z∗1)
全通系统
零点和极点互为共轭倒数
H ( z ) = z − 1 − a ∗ 1 − a z − 1 H(z)=\frac{z^{-1}-a^*}{1-az^{-1}} H(z)=1−az−1z−1−a∗
一般系统可分解为最小相位系统和全通系统的级联,由于全通系统的群延迟大于等于0,因此最小相位系统的群延迟也最小。
最小相位系统
最小相位和全通分解
假设零点 z = 1 c ∗ z=\frac{1}{c^*} z=c∗1在单位圆外
H ( z ) = H 1 ( z ) ( 1 − c z − 1 ) z − 1 − c ∗ 1 − c z − 1 H(z)=H_1(z)(1-cz^{-1})\frac{z^{-1}-c^*}{1-cz^{-1}} H(z)=H1(z)(1−cz−1)1−cz−1z−1−c∗
频率响应的补偿
H d ( z ) = H d m i n ( z ) H a p ( z ) H_d(z)=H_{dmin}(z)H_{ap}(z) Hd(z)=Hdmin(z)Hap(z)
补偿系统函数 H c ( z ) = 1 H d m i n ( z ) H_c(z)=\frac{1}{H_{dmin}(z)} Hc(z)=Hdmin(z)1
最小相位系统的性质
最小相位滞后,最小群延迟,最小能量延迟
广义线性相位的线性系统
线性相位系统
即理想群延迟
H i d ( e j ω ) = e − j ω α H_{id}(e^{j\omega})=e^{-j\omega\alpha} Hid(ejω)=e−jωα ∣ ω ∣ < π |\omega|<\pi ∣ω∣<π
α \alpha α是实数但不一定是整数
广义线性相位
H ( e j ω ) = A ( e j ω ) e − j α ω + j β H(e^{j\omega})=A(e^{j\omega})e^{-j\alpha\omega+j\beta} H(ejω)=A(ejω)e−jαω+jβ
序列必须对称
因果广义线性相位系统
第I类:M为偶数,偶对称
第II类:M为奇数,偶对称(-1)
第III类:M为偶数,奇对称(-1,1)
第IV类:M为奇数,奇对称(1)
离散时间系统结构
方框图表示
三种基本运算:相加,相乘
IIR
直接I型
直接II型:延迟单元合并
级联型
并联型
FIR
直接型
并联型
线性相位
滤波器设计方法
脉冲响应不变法
h [ n ] = T d h c ( n T d ) h[n]=T_dh_c(nT_d) h[n]=Tdhc(nTd)
H ( e j ω ) = H c ( j ω T d ) H(e^{j\omega})=H_c(j\frac{\omega}{T_d}) H(ejω)=Hc(jTdω) ∣ ω ∣ ≤ π |\omega|\le\pi ∣ω∣≤π
ω = Ω T d \omega=\Omega T_d ω=ΩTd
连续域的极点 s k s_k sk映射到离散域为 e s k T e^{s_kT} eskT
能保证线性关系,但可能会混叠,不能用于设计高通滤波器等
双线性变换法
s = 2 T d 1 − z − 1 1 + z − 1 s=\frac{2}{T_d}\frac{1-z^{-1}}{1+z^{-1}} s=Td21+z−11−z−1
Ω = 2 T d tan ω 2 \Omega=\frac{2}{T_d}\tan\frac{\omega}{2} Ω=Td2tan2ω
避免了混叠,但是会产生畸变
窗函数法
本质:利用时域乘积,频域卷积的性质
先由最大误差确定窗的种类,再根据主瓣宽度确定窗长
矩形窗可以得到最小的均方逼近
离散傅里叶变换
离散傅里叶级数
X ~ [ k ] = ∑ n = 0 N − 1 x ~ [ n ] e − j 2 π N k n \widetilde{X}[k]=\sum_{n=0}^{N-1}\widetilde{x}[n]e^{-j\frac{2\pi}{N}kn} X [k]=∑n=0N−1x [n]e−jN2πkn= ∑ n = 0 N − 1 x ~ [ n ] W N k n \sum_{n=0}^{N-1}\widetilde{x}[n]W_{N}^{kn} ∑n=0N−1x [n]WNkn
x [ n ] = 1 N ∑ k = 0 N − 1 X ~ [ k ] W N − k n x[n]=\frac{1}{N}\sum_{k=0}^{N-1}\widetilde{X}[k]W_{N}^{-kn} x[n]=N1∑k=0N−1X [k]WN−kn
离散傅里叶级数的性质
线性
x ~ [ n − m ] : W N k m X ~ [ k ] \widetilde{x}[n-m]:W_{N}^{km}\widetilde{X}[k] x [n−m]:WNkmX [k]
W N − n l x ~ [ n ] : X ~ [ k − l ] W_{N}^{-nl}\widetilde{x}[n]:\widetilde{X}[k-l] WN−nlx [n]:X [k−l]
对偶性
X ~ [ n ] : N x ~ [ − k ] \widetilde{X}[n]:N\widetilde{x}[-k] X [n]:Nx [−k]
周期卷积
∑ m = 0 N − 1 x 1 ~ [ m ] x 2 ~ [ n − m ] : X 1 ~ [ k ] X 2 ~ [ k ] \sum_{m=0}^{N-1}\widetilde{x_1}[m]\widetilde{x_2}[n-m]:\widetilde{X_1}[k]\widetilde{X_2}[k] ∑m=0N−1x1 [m]x2 [n−m]:X1 [k]X2 [k]
x 1 ~ [ n ] x 2 ~ [ n ] : 1 N ∑ l = 0 N − 1 X 1 ~ [ l ] X 2 ~ [ n − l ] \widetilde{x_1}[n]\widetilde{x_2}[n]:\frac{1}{N}\sum_{l=0}^{N-1}\widetilde{X_1}[l]\widetilde{X_2}[n-l] x1 [n]x2 [n]:N1∑l=0N−1X1 [l]X2 [n−l]
共轭对称
x ∗ ~ [ n ] : X ∗ ~ [ k ] \widetilde{x^*}[n]:\widetilde{X^*}[k] x∗ [n]:X∗ [k]
以及奇部和偶部的对称关系
周期信号
X ( e j ω ) = ∑ k = − ∞ + ∞ 2 π N X ~ [ k ] δ ( ω − 2 π k N ) X(e^{j\omega})=\sum_{k=-\infty}^{+\infty}\frac{2\pi}{N}\widetilde{X}[k]\delta(\omega-\frac{2\pi k}{N}) X(ejω)=∑k=−∞+∞N2πX [k]δ(ω−N2πk)
有限长序列的离散傅里叶变换
X [ k ] = ∑ n = 0 N − 1 x [ n ] e − j 2 π N k n X[k]=\sum_{n=0}^{N-1}x[n]e^{-j\frac{2\pi}{N}kn} X[k]=∑n=0N−1x[n]e−jN2πkn= ∑ n = 0 N − 1 x [ n ] W N k n \sum_{n=0}^{N-1}x[n]W_{N}^{kn} ∑n=0N−1x[n]WNkn
x [ n ] = 1 N ∑ n = 0 N − 1 X [ k ] W N − k n x[n]=\frac{1}{N}\sum_{n=0}^{N-1}X[k]W_{N}^{-kn} x[n]=N1∑n=0N−1X[k]WN−kn
离散傅里叶变换的性质
线性
循环移位 x [ ( ( n − m ) ) N ] : W N m k X [ k ] x[((n-m))_N]:W_{N}^{mk}X[k] x[((n−m))N]:WNmkX[k]
对偶性 X [ n ] : x [ ( ( − k ) ) N ] X[n]:x[((-k))_N] X[n]:x[((−k))N]
对称性 x ∗ [ n ] : X ∗ [ ( ( − k ) ) N ] x^*[n]:X^*[((-k))_N] x∗[n]:X∗[((−k))N]
循环卷积 ∑ m = 0 N − 1 x 1 [ m ] x 2 [ ( ( n − m ) ) N ] : X 1 [ k ] X 2 [ k ] \sum_{m=0}^{N-1}x_1[m]x_2[((n-m))_N]:X_1[k]X_2[k] ∑m=0N−1x1[m]x2[((n−m))N]:X1[k]X2[k]
x 1 [ n ] x 2 [ n ] : 1 N ∑ l = 0 N − 1 X 1 [ l ] X 2 [ ( ( k − l ) ) N ] x_1[n]x_2[n]:\frac{1}{N}\sum_{l=0}^{N-1}X_1[l]X_2[((k-l))_N] x1[n]x2[n]:N1∑l=0N−1X1[l]X2[((k−l))N]
离散傅里叶变换实现线性卷积
DFT点数大于线性卷积序列长度
DFT实现LTI系统
假定脉冲响应 h [ n ] h[n] h[n]长度为P, x [ n ] x[n] x[n]的长度远大于P,可以分成长度为L的小段,
重叠相加:
直接将每一段 x k [ n ] x_k[n] xk[n]补零到L+P-1
重叠保留:每段向前补P-1个点,输入L-P+1个新点
离散傅里叶变换的计算(FFT)
复数乘法: N 2 l o g 2 N \frac{N}{2}log_2N 2Nlog2N
复数加法: N l o g 2 N Nlog_2N Nlog2N
蝶形数目: N 2 \frac{N}{2} 2N
级数: l o g 2 N log_2N log2N
按时间抽取的FFT算法
推导过程
X [ k ] = ∑ n 为 偶 数 x [ n ] W N k n + ∑ n 为 奇 数 x [ n ] W N k n X[k]=\sum_{n为偶数}x[n]W_N^{kn}+\sum_{n为奇数}x[n]W_N^{kn} X[k]=∑n为偶数x[n]WNkn+∑n为奇数x[n]WNkn
= ∑ r = 0 N 2 − 1 x [ 2 r ] W N 2 r k + W N k ∑ r = 0 N 2 − 1 x [ 2 r + 1 ] W N 2 r k =\sum_{r=0}^{\frac{N}{2}-1}x[2r]W_N^{2rk}+W_{N}^{k}\sum_{r=0}^{\frac{N}{2}-1}x[2r+1]W_N^{2rk} =∑r=02N−1x[2r]WN2rk+WNk∑r=02N−1x[2r+1]WN2rk
= G [ k ] + W N k H [ k ] =G[k]+W_{N}^{k}H[k] =G[k]+WNkH[k]
可以分解为两个新的 N 2 \frac{N}{2} 2N点序列
蝶形图:
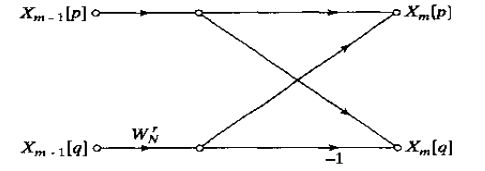
倒序输入,顺序输出(标准情形下,实际可能有变化)
按频率抽取的FFT算法
X [ 2 r ] = ∑ n = 0 N − 1 x [ n ] W N 2 r n X[2r]=\sum_{n=0}^{N-1}x[n]W_N^{2rn} X[2r]=∑n=0N−1x[n]WN2rn
= ∑ n = 0 N 2 − 1 x [ n ] W N 2 r n + ∑ n = N 2 N − 1 x [ n ] W N 2 r n =\sum_{n=0}^{\frac{N}{2}-1}x[n]W_N^{2rn}+\sum_{n=\frac{N}{2}}^{N-1}x[n]W_N^{2rn} =∑n=02N−1x[n]WN2rn+∑n=2NN−1x[n]WN2rn
= ∑ n = 0 N 2 − 1 ( x [ n ] + x [ n + N 2 ] ) W N 2 r n =\sum_{n=0}^{\frac{N}{2}-1}(x[n]+x[n+\frac{N}{2}])W_{\frac{N}{2}}^{rn} =∑n=02N−1(x[n]+x[n+2N])W2Nrn
同理可得
X [ 2 r + 1 ] = ∑ n = 0 N − 1 x [ n ] W N 2 r n W N n X[2r+1]=\sum_{n=0}^{N-1}x[n]W_N^{2rn}W_N^n X[2r+1]=∑n=0N−1x[n]WN2rnWNn
= ∑ n = 0 N 2 − 1 ( x [ n ] − x [ n + N 2 ] ) W N 2 r n W N n =\sum_{n=0}^{\frac{N}{2}-1}(x[n]-x[n+\frac{N}{2}])W_{\frac{N}{2}}^{rn}W_N^n =∑n=02N−1(x[n]−x[n+2N])W2NrnWNn
蝶形图:
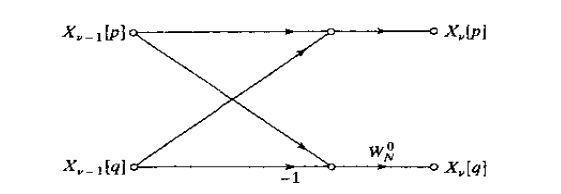
恰好为DIT-FFT的转置
顺序输入,倒序输出
利用离散傅里叶变换的信号傅里叶分析
Ω k = 2 π k N T \Omega_k=\frac{2\pi k}{NT} Ωk=NT2πk