进程管理(1):task_struct结构体说明
本篇笔记详细讲述task_struct结构体的基本内容,涉及的代码基于Linux5.9.8版本。
1. 进程和线程
关于进程和线程的概念,这里不赘述。需要了解的是在Linux内核中,进程通常被叫做任务,所以进程控制块(PCB)也被命名为struct task_struct。而Linux中是没有明确的线程的概念的,被称为轻量级进程,和进程使用相同的PCB结构,内核使用clone()来创建线程。
进程和线程的区别在于进程拥有独立的资源空间,而线程则共享进程的资源空间,通常一个进程可以拥有多个线程。
2. task_struct
Linux内核通过一个被称为进程描述符的task_struct结构体来管理进程,这个结构体包含了一个进程所需的所有信息。
该结构体存放在叫做任务列表的双向循环列表中。如下图所示:
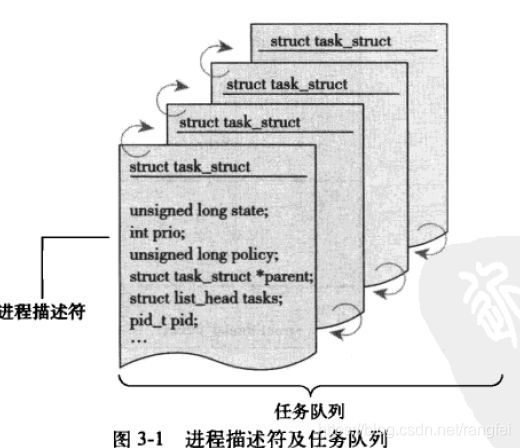
即系统中每一个进程/线程的PCB都由该双向链表进行管理。
2.1 结构体定义
其定义在==/include/linux/sched.h==文件中。
太长了,略去~~~
3. 成员解析
3.1 进程状态
volatile long state; /* -1 unrunnable, 0 runnable, >0 stopped */
int exit_state;
Linux kernel中有两类状态,其中state表示进程的运行状态,exit_state表示进程的退出状态,看起来很令人疑惑,但是这样的好处是但我们修改其中一类时,不会影响到另一类的状态。
状态值是bitmask,即有些状态可能是其他多种状态的或操作。
state成员可能的取值如下:
/* Used in tsk->state: */
#define TASK_RUNNING 0x0000
#define TASK_INTERRUPTIBLE 0x0001
#define TASK_UNINTERRUPTIBLE 0x0002
#define __TASK_STOPPED 0x0004
#define __TASK_TRACED 0x0008
/* Used in tsk->exit_state: */
#define EXIT_DEAD 0x0010
#define EXIT_ZOMBIE 0x0020
#define EXIT_TRACE (EXIT_ZOMBIE | EXIT_DEAD)
/* Used in tsk->state again: */
#define TASK_PARKED 0x0040
#define TASK_DEAD 0x0080
#define TASK_WAKEKILL 0x0100
#define TASK_WAKING 0x0200
#define TASK_NOLOAD 0x0400
#define TASK_NEW 0x0800
#define TASK_STATE_MAX 0x1000
/* Convenience macros for the sake of set_current_state: */
#define TASK_KILLABLE (TASK_WAKEKILL | TASK_UNINTERRUPTIBLE)
#define TASK_STOPPED (TASK_WAKEKILL | __TASK_STOPPED)
#define TASK_TRACED (TASK_WAKEKILL | __TASK_TRACED)
#define TASK_IDLE (TASK_UNINTERRUPTIBLE | TASK_NOLOAD)
/* Convenience macros for the sake of wake_up(): */
#define TASK_NORMAL (TASK_INTERRUPTIBLE | TASK_UNINTERRUPTIBLE)
/* get_task_state(): */
#define TASK_REPORT (TASK_RUNNING | TASK_INTERRUPTIBLE | \
TASK_UNINTERRUPTIBLE | __TASK_STOPPED | \
__TASK_TRACED | EXIT_DEAD | EXIT_ZOMBIE | \
TASK_PARKED)
下面我们介绍几个常用的取值:
| 状态 | 描述 |
|---|---|
| TASK_RUNNING | 表示进程正在执行或者处于准备执行的状态 |
| TASK_INTERRUPTIBLE | 进程因为等待某些条件处于阻塞(挂起的状态),一旦等待的条件成立,进程便会从该状态转化成就绪状态 |
| TASK_UNINTERRUPTIBLE | 意思与TASK_INTERRUPTIBLE类似,但是我们传递任意信号等不能唤醒他们,只有它所等待的资源可用的时候,他才会被唤醒。 |
| TASK_STOPPED | 进程被停止执行 |
| TASK_TRACED | 进程被debugger等进程所监视。 |
| EXIT_ZOMBIE | 进程的执行被终止,但是其父进程还没有使用wait()等系统调用来获知它的终止信息,此时进程成为僵尸进程 |
| EXIT_DEAD | 进程被杀死,即进程的最终状态。 |
| TASK_KILLABLE | 当进程处于这种可以终止的新睡眠状态中,它的运行原理类似于 TASK_UNINTERRUPTIBLE,只不过可以响应致命信号 |
3.2 进程标识符
pid_t pid; //进程的标识符
pid_t tgid; //线程组标识符
pid是进程唯一标识符(包括线程),它的引入是为了区别每个进程;tgid是线程组id,更像是真正意义上的进程id,共享资源的进程集合共享同一tgid
3.3 进程标记符
unsigned int flags; /* per process flags, defined below */
flags反应进程的状态信息,用于内核识别当前进程的状态。
它的取值范围如下:
#define PF_EXITING 0x00000004 /* getting shut down */
#define PF_EXITPIDONE 0x00000008 /* pi exit done on shut down */
#define PF_VCPU 0x00000010 /* I'm a virtual CPU */
#define PF_WQ_WORKER 0x00000020 /* I'm a workqueue worker */
#define PF_FORKNOEXEC 0x00000040 /* forked but didn't exec */
#define PF_MCE_PROCESS 0x00000080 /* process policy on mce errors */
#define PF_SUPERPRIV 0x00000100 /* used super-user privileges */
#define PF_DUMPCORE 0x00000200 /* dumped core */
#define PF_SIGNALED 0x00000400 /* killed by a signal */
#define PF_MEMALLOC 0x00000800 /* Allocating memory */
#define PF_NPROC_EXCEEDED 0x00001000 /* set_user noticed that RLIMIT_NPROC was exceeded */
#define PF_USED_MATH 0x00002000 /* if unset the fpu must be initialized before use */
#define PF_USED_ASYNC 0x00004000 /* used async_schedule*(), used by module init */
#define PF_NOFREEZE 0x00008000 /* this thread should not be frozen */
#define PF_FROZEN 0x00010000 /* frozen for system suspend */
#define PF_FSTRANS 0x00020000 /* inside a filesystem transaction */
#define PF_KSWAPD 0x00040000 /* I am kswapd */
#define PF_MEMALLOC_NOIO 0x00080000 /* Allocating memory without IO involved */
#define PF_LESS_THROTTLE 0x00100000 /* Throttle me less: I clean memory */
#define PF_KTHREAD 0x00200000 /* I am a kernel thread */
#define PF_RANDOMIZE 0x00400000 /* randomize virtual address space */
#define PF_SWAPWRITE 0x00800000 /* Allowed to write to swap */
#define PF_NO_SETAFFINITY 0x04000000 /* Userland is not allowed to meddle with cpus_allowed */
#define PF_MCE_EARLY 0x08000000 /* Early kill for mce process policy */
#define PF_MUTEX_TESTER 0x20000000 /* Thread belongs to the rt mutex tester */
#define PF_FREEZER_SKIP 0x40000000 /* Freezer should not count it as freezable */
#define PF_SUSPEND_TASK 0x80000000 /* this thread called freeze_processes and should not be frozen */
常用状态介绍:
| 状态 | 描述 |
|---|---|
| PF_FORKNOEXEC | 表示进程刚被创建,但还没有执行 |
| PF_SUPERPRIV | 表示进程拥有超级用户特权 |
| PF_SIGNALED | 表示进程被信号杀出 |
| PF_EXITING | 表示进程开始关闭 |
3.4 表示进程亲属关系的成员
struct task_struct __rcu *real_parent; /* real parent process */
struct task_struct __rcu *parent; /* recipient of SIGCHLD, wait4() reports */
struct list_head children; /* list of my children */
struct list_head sibling; /* linkage in my parent's children list */
struct task_struct *group_leader; /* threadgroup leader */
| 成员 | 描述 |
|---|---|
| real_parent | 指向当前操作系统执行进程的父进程,如果父进程不存在,指向pid为1的init进程 |
| paren | 指向当前进程的父进程,当当前进程终止时,需要向它发送wait4()的信号 |
| children | 位于链表的头部,链表的所有元素都是children的子进程 |
| group_leader | 指向进程组的领头进程 |
进程间亲属关系如下图所示:
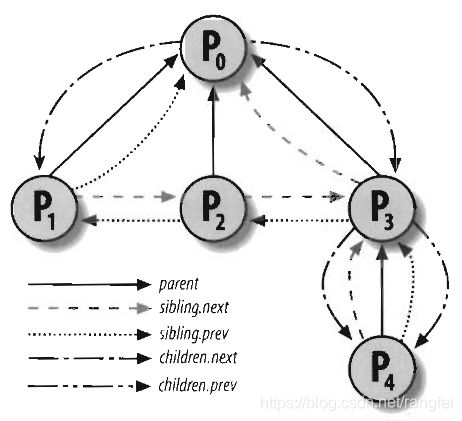
进程间通过多个双向循环链表组织
- parent指向父进程
- sibling指向兄弟进程
- children指向子进程
- sibling.next指向进程的下一个兄弟进程的进程描述符sibling成员,若其后没有其他兄弟进程,则指向父进程;而sibling.prev指向进程的上一个兄弟进程,若其之前没有兄弟进程,则指向父进程。
- children.next指向父进程的第一个子进程的sibling成员(而不是children成员!),而children.prev却指向父进程的最后一个子进程的sibling成员。
__rcu说明
该关键字定义在include/linux/compiler_types.h文件中。
# define __rcu __attribute__((noderef, address_space(__rcu)))
RCU代表的是 “read, copy, update”。它是一种算法,允许多个读者访问数据,并且同时允许修改者,删除者能够进行操作。
如果内核使用 CONFIG_SPARSE_RCU_POINTER 的编译, __rcu 就会被定义为上面的定义。
3.5 ptrace系统调用
unsigned int ptrace;
/*
* 'ptraced' is the list of tasks this task is using ptrace() on.
*
* This includes both natural children and PTRACE_ATTACH targets.
* 'ptrace_entry' is this task's link on the p->parent->ptraced list.
*/
struct list_head ptraced;
struct list_head ptrace_entry;
Ptrace提供了一种父进程,它可以被用来控制子进程的运行,常被用来进行断点调试,当它被设置为0时表示不需要追踪。
#define PT_SEIZED 0x00010000 /* SEIZE used, enable new behavior */
#define PT_PTRACED 0x00000001
#define PT_DTRACE 0x00000002 /* delayed trace (used on m68k, i386) */
#define PT_PTRACE_CAP 0x00000004 /* ptracer can follow suid-exec */
#define PT_OPT_FLAG_SHIFT 3
/* PT_TRACE_* event enable flags */
#define PT_EVENT_FLAG(event) (1 << (PT_OPT_FLAG_SHIFT + (event)))
#define PT_TRACESYSGOOD PT_EVENT_FLAG(0)
#define PT_TRACE_FORK PT_EVENT_FLAG(PTRACE_EVENT_FORK)
#define PT_TRACE_VFORK PT_EVENT_FLAG(PTRACE_EVENT_VFORK)
#define PT_TRACE_CLONE PT_EVENT_FLAG(PTRACE_EVENT_CLONE)
#define PT_TRACE_EXEC PT_EVENT_FLAG(PTRACE_EVENT_EXEC)
#define PT_TRACE_VFORK_DONE PT_EVENT_FLAG(PTRACE_EVENT_VFORK_DONE)
#define PT_TRACE_EXIT PT_EVENT_FLAG(PTRACE_EVENT_EXIT)
#define PT_TRACE_SECCOMP PT_EVENT_FLAG(PTRACE_EVENT_SECCOMP)
#define PT_EXITKILL (PTRACE_O_EXITKILL << PT_OPT_FLAG_SHIFT)
#define PT_SUSPEND_SECCOMP (PTRACE_O_SUSPEND_SECCOMP << PT_OPT_FLAG_SHIFT)
/* single stepping state bits (used on ARM and PA-RISC) */
#define PT_SINGLESTEP_BIT 31
#define PT_SINGLESTEP (1<
#define PT_BLOCKSTEP_BIT 30
#define PT_BLOCKSTEP (1<
3.6 进程调度
3.6.1 优先级
int prio;
int static_prio;
int normal_prio;
unsigned int rt_priority;
| 成员 | 描述 |
|---|---|
| static_prio | 用来保存静态优先级,可以调用nice系统直接来修改取值范围为100~139 |
| rt_priority | 用来保存实时优先级,取值范围为0~99 |
| prio | 用来保存动态优先级 |
| normal_prio | 它的值取决于静态优先级和调度策略 |
实时优先级和静态优先级的取值范围中,值越大,优先级越低
3.6.2 进程地址空间
进程都拥有自己的资源,这些资源指的就是进程的地址空间,每个进程都有着自己的地址空间,在task_struct中,有关进程地址空间的定义如下:
struct mm_struct *mm;
struct mm_struct *active_mm;
/* Per-thread vma caching: */
struct vmacache vmacache;
struct task_rss_stat rss_stat;
| 成员 | 描述 |
|---|---|
| mm | 进程所拥有的内存空间描述符,对于内核线程的mm为NULL |
| active_mm | 指进程运行时所使用的进程描述符 |
| rss_stat | 被用来记录缓冲信息 |
如果当前内核线程被调度之前运行的也是另外一个内核线程时候,那么其mm和avtive_mm都是NULL。
3.7 CPU编号信息
#ifdef CONFIG_SMP
int on_cpu;
struct __call_single_node wake_entry;
#ifdef CONFIG_THREAD_INFO_IN_TASK
/* Current CPU: */
unsigned int cpu;
#endif
unsigned int wakee_flips;
unsigned long wakee_flip_decay_ts;
struct task_struct *last_wakee;
int recent_used_cpu;
int wake_cpu;
#endif
on_cpu实际上是一个锁,目的是通过拥有未锁定的运行队列来避免高延迟,当它为0时,可以将任务移到另一个CPU中。
cpu字段指定在其上执行进程的CPU的编号。
参考链接
https://blog.csdn.net/bit_clearoff/article/details/54292300
__attribute__如何使用的记录