TensorRt(4)yolov3加载测试
本文介绍使用darknet项目原始的预训练模型yolov3.weights,经过tensorrt脚本转换为onnx模型,进一步编译优化编译位engine,最后使用TensorRt运行时进行推理。推理时的结果后处理使用c++实现,也给出了问题的说明。
文章目录
- 1、darkent模型转换转换
-
- 1.1、yolov3-608.weights模型转换.onnx模型
- 1.2、onnx模型优化为engine测试
- 1.3、使用C++ api转换
- 2、c++ RUNTIME api进行推理
-
- 2.1、网络前向推理部分代码
- 2.2、yolo detector 后处理代码
- 3、其他问题
-
- 3.1、yolov3-416模型如何转换
- 3.2、手写后处理的效率问题
1、darkent模型转换转换
1.1、yolov3-608.weights模型转换.onnx模型
在目录 samples\python\yolov3_onnx下提供了转换脚本,同时也提供了下载地址文件download.yml,注意这里目前脚本是针对模型是 yolov3-608。先手动下载需要的 yolov3-608的模型文件和配置文件,

运行脚本 yolov3_to_onnx.py 需要先安装依赖项 requirements.txt。安装后修改脚本中的文件路径(而不是下载),
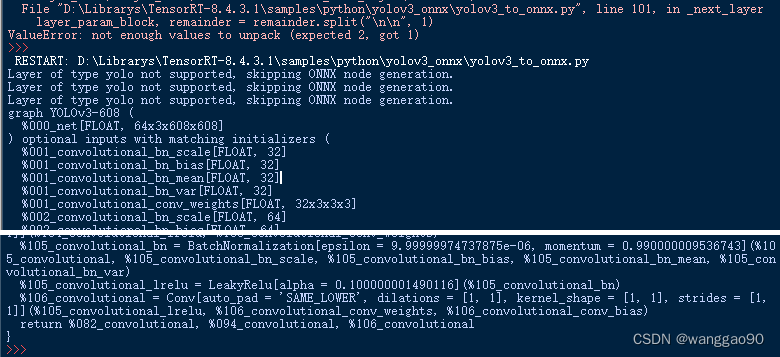
运行脚本,可能会出现如下错误
RESTART: D:\Librarys\TensorRT-8.4.3.1\samples\python\yolov3_onnx\yolov3_to_onnx.py
Traceback (most recent call last):
File "D:\Librarys\TensorRT-8.4.3.1\samples\python\yolov3_onnx\yolov3_to_onnx.py", line 713, in <module>
main()
File "D:\Librarys\TensorRT-8.4.3.1\samples\python\yolov3_onnx\yolov3_to_onnx.py", line 679, in main
layer_configs = parser.parse_cfg_file(cfg_file_path)
File "D:\Librarys\TensorRT-8.4.3.1\samples\python\yolov3_onnx\yolov3_to_onnx.py", line 60, in parse_cfg_file
layer_dict, layer_name, remainder = self._next_layer(remainder)
File "D:\Librarys\TensorRT-8.4.3.1\samples\python\yolov3_onnx\yolov3_to_onnx.py", line 101, in _next_layer
layer_param_block, remainder = remainder.split("\n\n", 1)
ValueError: not enough values to unpack (expected 2, got 1)
错误是因为脚本解析yolov3-608.cfg文件的问题,需要在文件最后增加两个换行

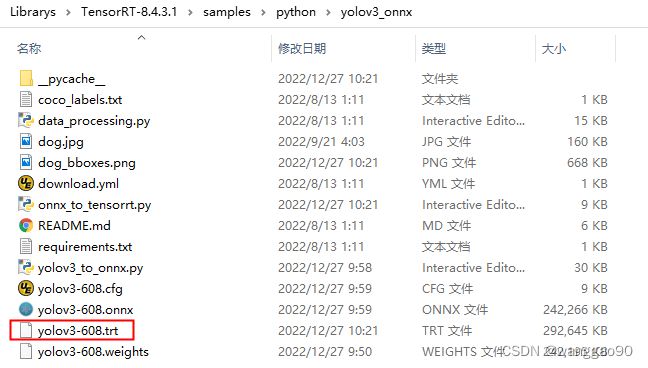
再次执行脚本,运行成功,且生成了 yolov3-608.onnx 文件
1.2、onnx模型优化为engine测试
这里先使用 samples\python\yolov3_onnx\onnx_to_tensorrt.py 脚本进行测试,控制台打印输出为
>>>
RESTART: D:\Librarys\TensorRT-8.4.3.1\samples\python\yolov3_onnx\onnx_to_tensorrt.py
Loading ONNX file from path yolov3-608.onnx...
Beginning ONNX file parsing
Completed parsing of ONNX file
Building an engine from file yolov3-608.onnx; this may take a while...
Completed creating Engine
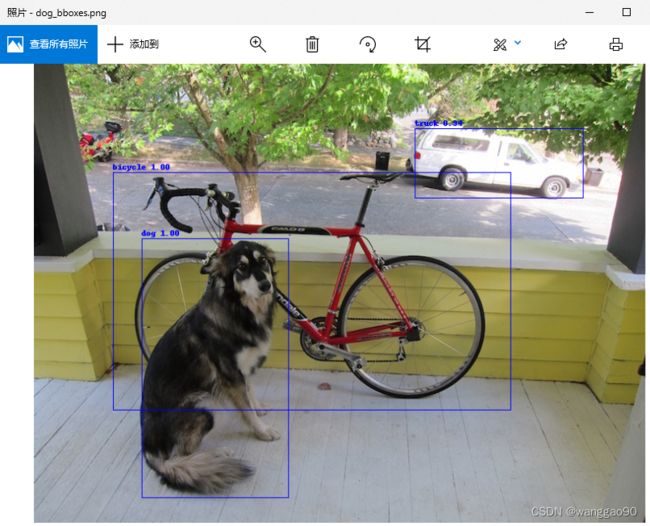
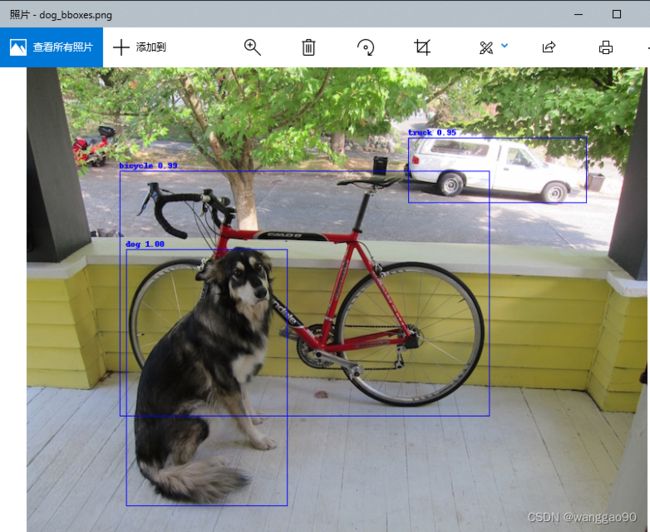
Running inference on image dog.jpg...
[[134.94207705 219.31212725 184.33163918 324.49731879]
[ 98.63979515 136.01691416 499.64743187 298.43303029]
[477.80247374 81.31213914 210.93741343 86.85370009]] [0.99852537 0.99885143 0.93933186] [16 1 7]
Saved image with bounding boxes of detected objects to dog_bboxes.png.
根据输出文本,对应的包围框、置信度、类别,检测到3个目标,输出图像 dog_bboxes.png 为
另外在build过程中,进行的配置有如下项目
config.max_workspace_size = 1 << 28 # 256MiB
builder.max_batch_size = 1
network.get_input(0).shape = [1, 3, 608, 608]
之后生成了一个engine文件,后面可以直接使用运行进行推理。
1.3、使用C++ api转换
int build()
{
samplesCommon::OnnxSampleParams params;
params.dataDirs.push_back(R"(data/yolo/)");
params.dataDirs.push_back(R"(samples\python\yolov3_onnx\)");
params.onnxFileName = "yolov3-608.onnx";
params.inputTensorNames.push_back("000_net"); // (1, 3, 608, 608)
params.outputTensorNames.push_back("082_convolutional"); // (1, 255, 19, 19)
params.outputTensorNames.push_back("094_convolutional"); // (1, 255, 38, 38)
params.outputTensorNames.push_back("106_convolutional"); // (1, 255, 76, 76)
params.dlaCore = -1;
//params.int8 = true;
// params.fp16 = true;
params.batchSize = 1;
//
auto builder = SampleUniquePtr<nvinfer1::IBuilder>(nvinfer1::createInferBuilder(sample::gLogger.getTRTLogger()));
const auto explicitBatch = 1U << static_cast<uint32_t>(NetworkDefinitionCreationFlag::kEXPLICIT_BATCH);
auto network = SampleUniquePtr<nvinfer1::INetworkDefinition>(builder->createNetworkV2(explicitBatch));
auto config = SampleUniquePtr<nvinfer1::IBuilderConfig>(builder->createBuilderConfig());
auto parser = SampleUniquePtr<nvonnxparser::IParser>(nvonnxparser::createParser(*network, sample::gLogger.getTRTLogger()));
auto parsed = parser->parseFromFile(locateFile(params.onnxFileName, params.dataDirs).c_str(),
static_cast<int>(sample::gLogger.getReportableSeverity()));
if(params.fp16) {
config->setFlag(BuilderFlag::kFP16);
}
if(params.int8) {
config->setFlag(BuilderFlag::kINT8);
samplesCommon::setAllDynamicRanges(network.get(), 127.0f, 127.0f);
}
samplesCommon::enableDLA(builder.get(), config.get(), params.dlaCore);
auto profileStream = samplesCommon::makeCudaStream();
config->setProfileStream(*profileStream);
// 对应 python ?
builder->setMaxBatchSize(params.batchSize);
config->setMaxWorkspaceSize(1 << 28);
network->getInput(0)->setDimensions(nvinfer1::Dims{4,{ 1,3,608,608 }});
//
SampleUniquePtr<IHostMemory> plan{builder->buildSerializedNetwork(*network, *config)};
std::ofstream ofs("yolov3-608.trt", std::ostream::binary);
ofs.write(static_cast<const char*>(plan->data()), plan->size());
ofs.close();
return 0;
}
不同编译优化选项,生成的engine文件大小也不一致。
2、c++ RUNTIME api进行推理
2.1、网络前向推理部分代码
int inference()
{
// engine文件读取到内存
std::string trtFile = locateFile("yolov3-608.trt", {"."});
std::ifstream ifs(trtFile, std::ifstream::binary);
if(!ifs) {
return false;
}
ifs.seekg(0, std::ios_base::end);
int size = ifs.tellg();
ifs.seekg(0, std::ios_base::beg);
std::unique_ptr<char> pData(new char[size]);
ifs.read(pData.get(), size);
ifs.close();
// engine模型
SampleUniquePtr<IRuntime> runtime{createInferRuntime(sample::gLogger.getTRTLogger())};
auto mEngine = std::shared_ptr<nvinfer1::ICudaEngine>(
runtime->deserializeCudaEngine(pData.get(), size), samplesCommon::InferDeleter());
auto mInputDims =
mEngine->getBindingDimensions(0); // [1,3,608,608]
auto mOutputDims = {
mEngine->getBindingDimensions(1), // [1, 255, 19, 19]
mEngine->getBindingDimensions(2), // [1, 255, 38, 38]
mEngine->getBindingDimensions(3) // [1, 255, 76, 76]
};
samplesCommon::BufferManager buffers(mEngine);
auto context = SampleUniquePtr<nvinfer1::IExecutionContext>(mEngine->createExecutionContext());
// 输入
cv::Mat img = cv::imread("dog.jpg");
cv::Mat blob = cv::dnn::blobFromImage(img, 1 / 255., {608,608}, {0,0,0}, true, false);
float* hostDataBuffer = static_cast<float*>(buffers.getHostBuffer(mEngine->getBindingName(0))); // input
memcpy(hostDataBuffer, blob.data, blob.total() * blob.elemSize()); // 1*3*608*608
// 推理
buffers.copyInputToDevice();
context->executeV2(buffers.getDeviceBindings().data());
buffers.copyOutputToHost();
// 输出
std::vector<cv::Mat> outs{
cv::Mat({ 1,255,19,19 },CV_32F,static_cast<float*>(buffers.getHostBuffer(mEngine->getBindingName(1)))),
cv::Mat({ 1,255,38,38 },CV_32F,static_cast<float*>(buffers.getHostBuffer(mEngine->getBindingName(2)))),
cv::Mat({ 1,255,76,76 },CV_32F,static_cast<float*>(buffers.getHostBuffer(mEngine->getBindingName(3)))),
};
// 后处理和可视化
std::vector<int> inds;
std::vector<float> confs;
std::vector<cv::Rect> rects;
YoloDetector::postprocess(outs, img.rows, img.cols, inds, confs, rects);
std::vector<std::string> classes = loadClasses(R"(D:\Librarys\TensorRT-8.4.3.1\samples\python\yolov3_onnx\coco_labels.txt)");
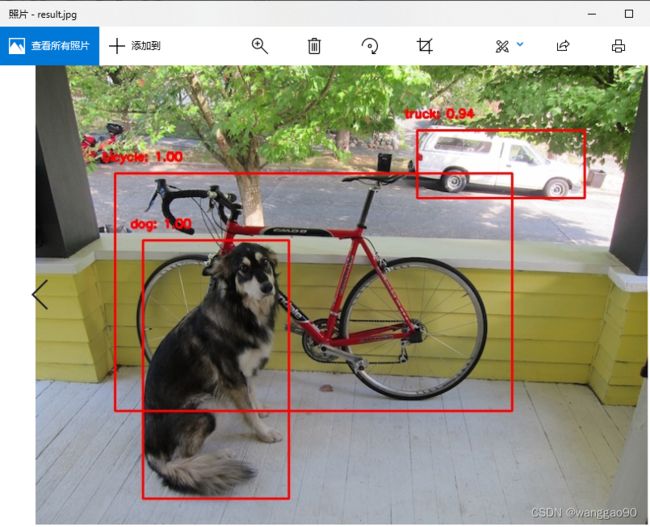
for(int i = 0; i < rects.size(); i++) {
cv::rectangle(img, rects[i], {0,0,255}, 2);
cv::putText(img, cv::format("%s: %.2f", classes[inds[i]], confs[i]), rects[i].tl() - cv::Point{16,16}, cv::FONT_HERSHEY_SIMPLEX, 0.5, {0,0,255}, 2);
}
cv::imshow("img", img);
cv::imwrite("result.jpg", img);
cv::waitKey(0);
return 0;
}
读取类型文件的代码为
std::vector<std::string> loadClasses(const std::string& classesFile)
{
std::vector<std::string> classes;
if(!classesFile.empty()) {
const std::string& file = classesFile;
std::ifstream ifs(file.c_str());
if(!ifs.is_open())
CV_Error(cv::Error::StsError, "File " + file + " not found");
std::string line;
while(std::getline(ifs, line)) {
classes.push_back(line);
}
}
return classes;
}
运行结果如图所示,与python代码结果一致。
2.2、yolo detector 后处理代码
yolov3-608的输出有3个,图中显示的batchSize=64,可以将cfg中的batch=64修改为1重新执行转换脚本生成onnx即可。
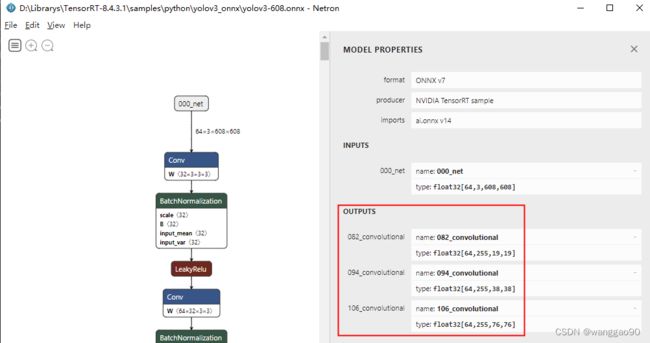
三个输出,对应三个不同的尺度,分别是 19*19、38*38 和 76*76,每个尺度上的每个位置生成3个结果,每个结果包含 位置4个信息、目标置信度、每个类别的置信度,对于目前coco就是 3*(4 + 1 + 80) = 255。
这里直接给出后处理的主要函数部分
void YoloDetector::postprocess(const std::vector<cv::Mat> convBlobs,
int frameHeight, int frameWidth,
std::vector<int>& inds,
std::vector<float>& confs,
std::vector<cv::Rect>& rects)
{
std::vector<cv::Mat> yoloBlobs(convBlobs.size());
for (size_t ii = 0; ii < convBlobs.size(); ii++)
{
const cv::Mat& inpBlob = convBlobs[ii];
cv::Mat& outBlob = yoloBlobs[ii];
int batch_size = inpBlob.size[0];
int channels = inpBlob.size[1];
int rows = inpBlob.size[2];
int cols = inpBlob.size[3];
assert(channels == mYolov3Args.cell_size * mYolov3Args.anchor);
//int hNorm = convBlobs.size() > 1 ? convBlobs[1].size[2] : rows;
//int wNorm = convBlobs.size() > 1 ? convBlobs[1].size[3] : cols;
int hNorm = mYolov3Args.input_resolution[0];
int wNorm = mYolov3Args.input_resolution[1];
// n*c*h*w => ( n*h*w*3 )*( pos + 1 + cls)
//
//int sample_size = mYolov3Args.cell_size * (rows * cols * mYolov3Args.anchor);
outBlob.create(batch_size * rows * cols * mYolov3Args.anchor, mYolov3Args.cell_size, CV_32F);
for (int b = 0; b < batch_size; b++) {
for (int r = 0; r < rows; r++) {
for (int c = 0; c < cols; c++) {
for (int anc = 0; anc < mYolov3Args.anchor; anc++) {
int index= b * (mYolov3Args.anchor * rows * cols) + r * (mYolov3Args.anchor * cols) + c * mYolov3Args.anchor + anc;
// prob
float x = inpBlob.at<float>(cv::Vec4i(b, anc*mYolov3Args.cell_size + 4,r,c));
outBlob.at<float>(index, 4) = logistic_activate(x); // logistic activation
// obj
for (int cls = 0; cls < mYolov3Args.classes; cls++) {
float x = inpBlob.at<float>(cv::Vec4i(b,anc * mYolov3Args.cell_size + 4 + 1 + cls, r,c));
outBlob.at<float>(index,4 + 1 + cls) = logistic_activate(x) * outBlob.at<float>(index,4);
}
// rect
const float scale_x_y = 1.0f;
float x_tmp = (logistic_activate(inpBlob.at<float>(cv::Vec4i(b,anc * mYolov3Args.cell_size + 0,r,c))) - 0.5f) * scale_x_y + 0.5f;
float y_tmp = (logistic_activate(inpBlob.at<float>(cv::Vec4i(b,anc * mYolov3Args.cell_size + 1,r,c))) - 0.5f) * scale_x_y + 0.5f;
const std::array<int,2>& anchor_ch = mYolov3Args.anchors[mYolov3Args.masks[ii][anc]];
outBlob.at<float>(index,0) = (c + x_tmp) / cols;
outBlob.at<float>(index,1) = (r + y_tmp) / rows;
outBlob.at<float>(index,2) = std::exp(inpBlob.at<float>(cv::Vec4i(b,anc * mYolov3Args.cell_size + 2,r,c))) * anchor_ch[0] / wNorm ;
outBlob.at<float>(index,3) = std::exp(inpBlob.at<float>(cv::Vec4i(b,anc * mYolov3Args.cell_size + 3,r,c))) * anchor_ch[1] / hNorm;
}
}
}
}
}
// all detections
inds.clear();
confs.clear();
rects.clear();
for (int i = 0; i < yoloBlobs.size(); ++i)
{
// Network produces output blob with a shape NxC where N is a number of
// detected objects and C is a number of classes + 4 where the first 4
// numbers are [center_x, center_y, width, height]
float* data = (float*)yoloBlobs[i].data;
for (int j = 0; j < yoloBlobs[i].rows; ++j,data += yoloBlobs[i].cols)
{
cv::Mat scores = yoloBlobs[i].row(j).colRange(5,yoloBlobs[i].cols);
cv::Point classIdPoint;
double conf;
minMaxLoc(scores,nullptr,&conf,nullptr,&classIdPoint);
if (static_cast<float>(conf) < mYolov3Args.threshold)
continue;
int centerX = data[0] * frameWidth;
int centerY = data[1] * frameHeight;
int width = data[2] * frameWidth;
int height = data[3] * frameHeight;
int left = std::max(0,std::min(centerX - width / 2,frameWidth - 1));
int top = std::max(0,std::min(centerY - height / 2,frameHeight - 1));
width = std::max(1,std::min(width,frameWidth - left));
height = std::max(1,std::min(height,frameHeight - top));
inds.push_back(classIdPoint.x);
confs.push_back(static_cast<float>(conf));
rects.emplace_back(left,top,width,height);
}
}
// 整体上的nms, 没有对每个类别单独做
if (mYolov3Args.nms_threshold > 0 ) {
std::vector<int> classIds;
std::vector<float> confidences;
std::vector<cv::Rect> boxes;
std::vector<int> indices;
cv::dnn::NMSBoxes(rects,confs, mYolov3Args.threshold ,mYolov3Args.nms_threshold,indices);
for (int idx : indices)
{
boxes.push_back(rects[idx]);
confidences.push_back(confs[idx]);
classIds.push_back(inds[idx]);
}
rects = std::move(boxes);
inds = std::move(classIds);
confs = std::move(confidences);
}
}
struct Yolov3Args {
// A list of 3 three-dimensional tuples for the YOLO masks
std::vector<std::array<int,3>> masks{
{6, 7, 8},
{3, 4, 5},
{0, 1, 2}
};
// A list of 9 two - dimensional tuples for the YOLO anchors
std::vector<std::array<int,2>> anchors{
{10, 13},
{16, 30},
{33, 23}, //
{30, 61},
{62, 45},
{59, 119}, //
{116, 90},
{156, 198},
{373, 326}, //
};
// Threshold for object coverage,float value between 0 and 1
float threshold{ 0.6f };
// Threshold for non - max suppression algorithm,float value between 0 and 1
float nms_threshold = { 0.5f };
std::array<int,2> input_resolution{ 608,608 };
int anchor = 3;
int classes = 80;
int coords = 4;
int cell_size = classes + coords + 1;
};
static float logistic_activate(float x) { return 1.F / (1.F + exp(-x)); }
static void softmax_activate(const float* input,const int n,const float temp,float* output)
{
int i;
float sum = 0;
float largest = -FLT_MAX;
for (i = 0; i < n; ++i) {
if (input[i] > largest) largest = input[i];
}
for (i = 0; i < n; ++i) {
float e = exp((input[i] - largest) / temp);
sum += e;
output[i] = e;
}
for (i = 0; i < n; ++i) {
output[i] /= sum;
}
}
3、其他问题
3.1、yolov3-416模型如何转换
在脚本yolov3_to_onnx.py中模型转换是根据cfg文件解析,需要人为的指定输出层的名字以供onnx进行权重值转换,因此仅需要修改如下部分
# shape of (in CHW format): yolov3-608
output_tensor_dims = OrderedDict()
output_tensor_dims["082_convolutional"] = [255, 19, 19]
output_tensor_dims["094_convolutional"] = [255, 38, 38]
output_tensor_dims["106_convolutional"] = [255, 76, 76]
# shape of (in CHW format): yolov3-416
output_tensor_dims = OrderedDict()
output_tensor_dims["082_convolutional"] = [255, 13, 13]
output_tensor_dims["094_convolutional"] = [255, 26, 26]
output_tensor_dims["106_convolutional"] = [255, 52, 52]
转换后的查看输出为

测试脚本,修改加载的onnx和trt文件名称、修改的地方有
onnx_file_path = "yolov3-416.onnx"
engine_file_path = "yolov3-416.trt"
#input_resolution_yolov3_HW = (608, 608)
input_resolution_yolov3_HW = (416, 416)
#output_shapes = [(1, 255, 19, 19), (1, 255, 38, 38), (1, 255, 76, 76)]
output_shapes = [(1, 255, 13, 13), (1, 255, 26, 26), (1, 255, 52, 52)]
#network.get_input(0).shape = [1, 3, 608, 608]
network.get_input(0).shape = [1, 3, 416, 416]
执行结果为
>>>
RESTART: D:\Librarys\TensorRT-8.4.3.1\samples\python\yolov3_onnx\onnx_to_tensorrt.py
Loading ONNX file from path yolov3-416.onnx...
Beginning ONNX file parsing
Completed parsing of ONNX file
Building an engine from file yolov3-416.onnx; this may take a while...
Completed creating Engine
Running inference on image dog.jpg...
[[122.5109715 225.01062311 199.10577509 317.32366383]
[114.91165433 128.17760862 456.74105451 302.43399097]
[472.04688328 86.89298721 219.78270777 79.65799847]] [0.99860307 0.98919281 0.95482076] [16 1 7]
Saved image with bounding boxes of detected objects to dog_bboxes.png.
从结果可视化看,608和416的结果框略有差异。
3.2、手写后处理的效率问题
目前使用机器 i7700k,1080ti,使用yolov3-416模型测试。编辑一个统计时间的代码
class TicketMeter {
public:
TicketMeter(const std::string& info, int count = 1): infoPrefix(info), count(count) {
start = std::chrono::high_resolution_clock::now();
}
~TicketMeter() {
end = std::chrono::high_resolution_clock::now();
std::cout << infoPrefix << ": " << std::chrono::duration_cast<std::chrono::milliseconds>(end - start).count()*1.f / count << " mills" << std::endl;
}
private:
std::chrono::steady_clock::time_point start, end;
int count;
std::string infoPrefix;
};
之后在c++的测试代码的前向、后处理增加以下代码,分别测试100次:
// 推理
buffers.copyInputToDevice();
context->executeV2(buffers.getDeviceBindings().data());
buffers.copyOutputToHost();
{
TicketMeter tm("========= inference avg time", 100);
for(int i = 0; i < 100; i++) context->executeV2(buffers.getDeviceBindings().data());
}
YoloDetector::postprocess(outs, img.rows, img.cols, inds, confs, rects);
{
TicketMeter tm("========= postprocess avg time", 100);
for(int i = 0; i < 100; i++) YoloDetector::postprocess(outs, img.rows, img.cols, inds, confs, rects);
}
运行提示为
[12/27/2022-14:53:49] [I] [TRT] [MemUsageChange] Init CUDA: CPU +278, GPU +0, now: CPU 22733, GPU 1120 (MiB)
[12/27/2022-14:53:49] [I] [TRT] Loaded engine size: 383 MiB
[12/27/2022-14:53:50] [I] [TRT] [MemUsageChange] TensorRT-managed allocation in engine deserialization: CPU +0, GPU +0, now: CPU 0, GPU 0 (MiB)
[12/27/2022-14:53:50] [I] [TRT] [MemUsageChange] TensorRT-managed allocation in IExecutionContext creation: CPU +0, GPU +0, now: CPU 0, GPU 0 (MiB)
========= inference avg time: 8.61 mills
========= postprocess avg time: 12.86 mills
可以看到推理耗时8.61ms,网络后处理时间耗费12.86ms,一张图的完整处理时间60%耗费在后处理上。
其他配置机器的测试时间结果如下:
TODO
网络输出的格式为 [N,C,H,W],可以整理为 [N,H,W,C]从数据格式上保证每一个候选框的输出数据维度上的255个内存数据是连续的,也就是调整输出为[N*H*W, C]的格式。
TensorRt中也含有NMS的插件,可以替换前面手写的cpu代码,可能进一步提高整体流程效率。
TODO