(四)可视化IMU数据
一、IMU数据格式
从KITTI的readme文件中https://github.com/yanii/kitti-pcl/blob/master/KITTI_README.TXT可以看到IMU里数据的格式,
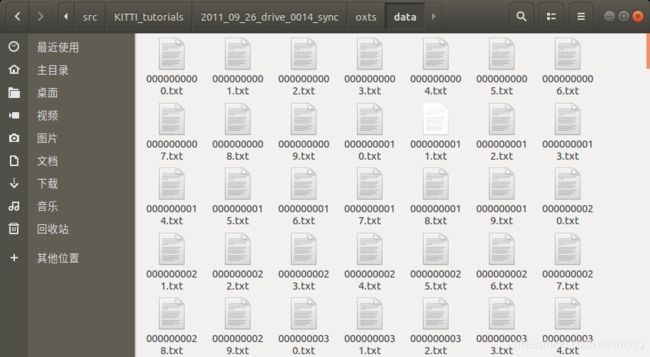
KITTI中的IMUS数据文件存在oxts文件夹下,以txt格式保存。
其中有[‘lat’,‘lon’,‘alt’,‘roll’,‘pith’,‘yaw’,‘vn’,‘ve’,‘vf’,‘vl’,‘vu’,‘ax’,‘ay’,‘az’,‘af’,‘al’,‘au’,‘wx’,‘wy’,‘wz’,‘wf’,
‘wl’,‘wu’,‘posacc’,‘velacc’,‘navstat’,‘numsats’,‘posmode’,‘velomde’,‘orimode’]
而我们常用的数据有:
- lat: 维度(deg)
- lon:经度(deg)
- alt:海拔(m)
- roll :是围绕Z轴旋转,也叫翻滚角(rad);
- pith :是围绕X轴旋转,也叫做俯仰角(rad);
- yaw :是围绕Y轴旋转,也叫偏航角(rad)。
- vf:前进方向速度(m/s)
- vl:左方向速度(m/s)
- vu:垂直向上方向(m/s)
- ax:x方向加速度(m^2/s)
- ay:y方向加速度(m^2/s)
- az:z方向加速度(m^2/s)
- af:前进方向加速度(m^2/s)
- al:左方向加速度(m^2/s)
- au:垂直向上方向加速度(m^2/s)

以上数据ax,ay,az以GPS/IMU坐标系下采集的数据,而vf,vl,vu,af,al,au是以车辆坐标系,在这里也就是velo坐标系的数据,因此使用这几项数据,而不用坐标转换。
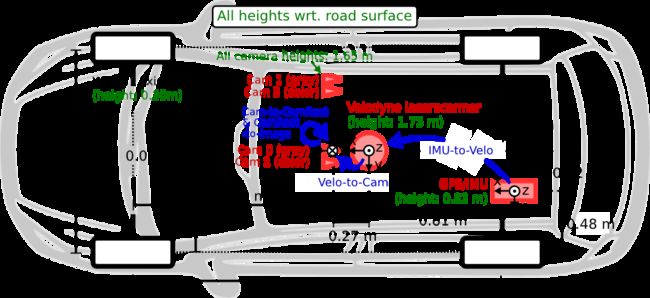
通过其中的roll pith 和yew 即可描述此时车辆的姿态,其代表含义如下:

二、ROS发布IMU Meaasge
在链接地址中是ROS中对IMU消息定义的sensor_msgs/Imu.msg消息格式:
http://docs.ros.org/jade/api/sensor_msgs/html/msg/Imu.html
在发布Message时需要建立一个Header,然后使用roll,pith,yaw设置车辆的旋转量,使用af,al,au设定线性加速度 以voludyne 坐标系为准,再使用wf,wl,wu设置角速度。
- Header header
- geometry_msgs/Quaternion orientation
float64[9] orientation_covariance # Row major about x, y, z axes - geometry_msgs/Vector3 angular_velocity
float64[9] angular_velocity_covariance # Row major about x, y, z axes - geometry_msgs/Vector3 linear_acceleration
float64[9] linear_acceleration_covariance # Row major x, y z
使用ROSPY定义如下:
publish_utils.py
def publish_imu(imu_pub,imu_data):
imu = Imu()
imu.header.stamp = rospy.Time.now()
imu.header.frame_id = FRAME_ID
# 使用roll,pith,yaw设定车辆旋转量
q=tf.transformations.quaternion_from_euler(float(imu_data.roll), float(imu_data.pith), float(imu_data.yaw))
imu.orientation.x = q[0]
imu.orientation.y = q[1]
imu.orientation.z = q[2]
imu.orientation.w = q[3]
# 使用af,al,au设定线形加速度 以voludyne 坐标系为准
imu.linear_acceleration.x = imu_data.af
imu.linear_acceleration.y = imu_data.al
imu.linear_acceleration.z = imu_data.au
# 使用wf,wl,wu设置角速度
imu.angular_velocity.x = imu_data.wf
imu.angular_velocity.y = imu_data.wl
imu.angular_velocity.z = imu_data.wu
imu_pub.publish(imu)
对imu文件进行解析读取:
data_utils.py
# 读取IMU数据
IMU_COLUMN_NAMES = ['lat','lon','alt','roll','pith','yaw','vn','ve','vf','vl','vu','ax','ay','az','af','al','au','wx','wy','wz','wf',
'wl','wu','posacc','velacc','navstat','numsats','posmode','velomde','orimode']
def read_imu(path):
df = pd.read_csv(path,header = None,sep = ' ')
df.columns = IMU_COLUMN_NAMES
return df
kitti.py
# 发布时使用ros中的imu格式发布
imu_pub = rospy.Publisher('kitti_imu', Imu ,queue_size=10)
publish_imu(imu_pub,imu_data)
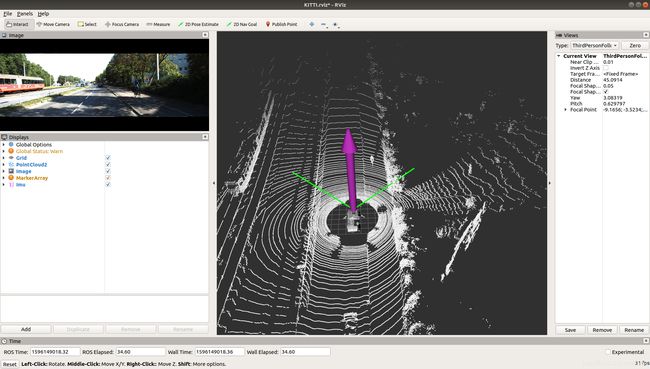
将Imu的话题在RVIZ可视化后, 效果如下图: