- PyTorch & TensorFlow速成复习:从基础语法到模型部署实战(附FPGA移植衔接)
阿牛的药铺
算法移植部署pytorchtensorflowfpga开发
PyTorch&TensorFlow速成复习:从基础语法到模型部署实战(附FPGA移植衔接)引言:为什么算法移植工程师必须掌握框架基础?针对光学类产品算法FPGA移植岗位需求(如可见光/红外图像处理),深度学习框架是算法落地的"桥梁"——既要用PyTorch/TensorFlow验证算法可行性,又要将训练好的模型(如CNN、目标检测)转换为FPGA可部署的格式(ONNX、TFLite)。本文采用"
- 霍夫变换(Hough Transform)算法原来详解和纯C++代码实现以及OpenCV中的使用示例
点云SLAM
算法图形图像处理算法opencv图像处理与计算机视觉算法直线提取检测目标检测霍夫变换算法
霍夫变换(HoughTransform)是一种经典的图像处理与计算机视觉算法,广泛用于检测图像中的几何形状,例如直线、圆、椭圆等。其核心思想是将图像空间中的“点”映射到参数空间中的“曲线”,从而将形状检测问题转化为参数空间中的峰值检测问题。一、霍夫变换基本思想输入:边缘图像(如经过Canny边缘检测)输出:一组满足几何模型的形状(如直线、圆)关键思想:图像空间中的一个点→参数空间中的一个曲线参数空
- 【目标检测】机场内部目标检测数据集4106张YOLO+VOC格式
数据集格式:VOC格式+YOLO格式压缩包内含:3个文件夹,分别存储图片、xml、txt文件JPEGImages文件夹中jpg图片总计:4106Annotations文件夹中xml文件总计:4106labels文件夹中txt文件总计:4106标签种类数:7标签名称:["Ground_vehicles","Horizontal_sign","Runaway_limit","Taxiway","Ver
- 传统检测响应慢?陌讯多模态引擎提速90+FPS实战
2501_92473147
算法计算机视觉目标检测
开篇痛点:实时目标检测在安防监控中的核心挑战在安防监控领域,实时目标检测是保障公共安全的关键技术。然而,传统算法如YOLOv5或开源框架MMDetection常面临两大痛点:误报率高(复杂光照或遮挡场景下检测不稳定)和响应延迟(高分辨率视频流处理FPS低于30)。实测数据显示,城市交通监控系统误报率达15%,导致安保资源浪费;客户反馈表明,延迟超100ms时,目标跟踪可能失效。这些问题源于算法泛化
- 盲超分的核心概念
小冷爱读书
数学建模盲超分超分重建
一、盲超分的本质与数学建模1.退化过程的数学表达低分辨率图像(LR)可看作高分辨率图像(HR)经过退化模型后的结果::观测到的低分辨率图像:待恢复的高分辨率图像:模糊核(BlurKernel)⊗:卷积操作↓:下采样(步长为):加性噪声(如高斯噪声、泊松噪声等)盲超分的核心问题:在未知、、的情况下,从估计。2.为什么传统超分方法会失效?传统方法(如SRCNN、EDSR)假设退化是固定的(如双三次下采
- 深度学习模型表征提取全解析
ZhangJiQun&MXP
教学2024大模型以及算力2021AIpython深度学习人工智能pythonembedding语言模型
模型内部进行表征提取的方法在自然语言处理(NLP)中,“表征(Representation)”指将文本(词、短语、句子、文档等)转化为计算机可理解的数值形式(如向量、矩阵),核心目标是捕捉语言的语义、语法、上下文依赖等信息。自然语言表征技术可按“静态/动态”“有无上下文”“是否融入知识”等维度划分一、传统静态表征(无上下文,词级为主)这类方法为每个词分配固定向量,不考虑其在具体语境中的含义(无法解
- 【Qualcomm】高通SNPE框架简介、下载与使用
Jackilina_Stone
人工智能QualcommSNPE
目录一高通SNPE框架1SNPE简介2QNN与SNPE3Capabilities4工作流程二SNPE的安装与使用1下载2Setup3SNPE的使用概述一高通SNPE框架1SNPE简介SNPE(SnapdragonNeuralProcessingEngine),是高通公司推出的面向移动端和物联网设备的深度学习推理框架。SNPE提供了一套完整的深度学习推理框架,能够支持多种深度学习模型,包括Pytor
- 目标检测(object detection)
加油吧zkf
目标检测目标检测人工智能计算机视觉
目标检测作为计算机视觉的核心技术,在自动驾驶、安防监控、医疗影像等领域发挥着不可替代的作用。本文将系统讲解目标检测的概念、原理、主流模型、常见数据集及应用场景,帮助读者构建对这一技术的完整认知。一、目标检测的核心概念目标检测(ObjectDetection)是指在图像或视频中自动定位并识别出所有感兴趣的目标的技术。它需要解决两个核心问题:分类(Classification):确定图像中每个目标的类
- 深度学习篇---昇腾NPU&CANN 工具包
Atticus-Orion
上位机知识篇图像处理篇深度学习篇深度学习人工智能NPU昇腾CANN
介绍昇腾NPU是华为推出的神经网络处理器,具有强大的AI计算能力,而CANN工具包则是面向AI场景的异构计算架构,用于发挥昇腾NPU的性能优势。以下是详细介绍:昇腾NPU架构设计:采用达芬奇架构,是一个片上系统,主要由特制的计算单元、大容量的存储单元和相应的控制单元组成。集成了多个CPU核心,包括控制CPU和AICPU,前者用于控制处理器整体运行,后者承担非矩阵类复杂计算。此外,还拥有AICore
- 深度学习图像分类数据集—桃子识别分类
AI街潜水的八角
深度学习图像数据集深度学习分类人工智能
该数据集为图像分类数据集,适用于ResNet、VGG等卷积神经网络,SENet、CBAM等注意力机制相关算法,VisionTransformer等Transformer相关算法。数据集信息介绍:桃子识别分类:['B1','M2','R0','S3']训练数据集总共有6637张图片,每个文件夹单独放一种数据各子文件夹图片统计:·B1:1601张图片·M2:1800张图片·R0:1601张图片·S3:
- 微算法科技的前沿探索:量子机器学习算法在视觉任务中的革新应用
MicroTech2025
量子计算算法
在信息技术飞速发展的今天,计算机视觉作为人工智能领域的重要分支,正逐步渗透到我们生活的方方面面。从自动驾驶到人脸识别,从医疗影像分析到安防监控,计算机视觉技术展现了巨大的应用潜力。然而,随着视觉任务复杂度的不断提升,传统机器学习算法在处理大规模、高维度数据时遇到了计算瓶颈。在此背景下,量子计算作为一种颠覆性的计算模式,以其独特的并行处理能力和指数级增长的计算空间,为解决这一难题提供了新的思路。微算
- 目标检测中的NMS算法详解
好的,我们来详细解释一下目标检测中非极大值抑制(Non-MaximumSuppression,NMS)的相关概念和计算过程。1.为什么需要NMS?问题:目标检测模型(如FasterR-CNN,YOLO,SSD等)在推理时,对于同一个目标物体,通常会预测出多个重叠的、不同置信度(confidencescore)的候选边界框(BoundingBoxes)。直接输出所有这些框会导致:结果冗余:同一个物体
- NumPy-@运算符详解
GG不是gg
numpynumpy
NumPy-@运算符详解一、@运算符的起源与设计目标1.从数学到代码:符号的统一2.设计目标二、@运算符的核心语法与运算规则1.基础用法:二维矩阵乘法2.一维向量的矩阵语义3.高维数组:批次矩阵运算4.广播机制:灵活的形状匹配三、@运算符与其他乘法方式的核心区别1.对比`np.dot()`2.对比元素级乘法`*`3.对比`np.matrix`的`*`运算符四、典型应用场景:从基础到高阶1.深度学习
- NLP_知识图谱_大模型——个人学习记录
macken9999
自然语言处理知识图谱大模型自然语言处理知识图谱学习
1.自然语言处理、知识图谱、对话系统三大技术研究与应用https://github.com/lihanghang/NLP-Knowledge-Graph深度学习-自然语言处理(NLP)-知识图谱:知识图谱构建流程【本体构建、知识抽取(实体抽取、关系抽取、属性抽取)、知识表示、知识融合、知识存储】-元気森林-博客园https://www.cnblogs.com/-402/p/16529422.htm
- 解决 Python 包安装失败问题:以 accelerate 为例
在使用Python开发项目时,我们经常会遇到依赖包安装失败的问题。今天,我们就以accelerate包为例,详细探讨一下可能的原因以及解决方法。通过这篇文章,你将了解到Python包安装失败的常见原因、如何切换镜像源、如何手动安装包,以及一些实用的注意事项。一、问题背景在开发一个深度学习项目时,我需要安装accelerate包来优化模型的训练过程。然而,当我运行以下命令时:bash复制pipins
- 从RNN循环神经网络到Transformer注意力机制:解析神经网络架构的华丽蜕变
熊猫钓鱼>_>
神经网络rnntransformer
1.引言在自然语言处理和序列建模领域,神经网络架构经历了显著的演变。从早期的循环神经网络(RNN)到现代的Transformer架构,这一演变代表了深度学习方法在处理序列数据方面的重大进步。本文将深入比较这两种架构,分析它们的工作原理、优缺点,并通过实验结果展示它们在实际应用中的性能差异。2.循环神经网络(RNN)2.1基本原理循环神经网络是专门为处理序列数据而设计的神经网络架构。RNN的核心思想
- 如何使用Python实现交通工具识别
如何使用Python实现交通工具识别文章目录技术架构功能流程识别逻辑用户界面增强特性依赖项主要类别内容展示该系统是一个基于深度学习的交通工具识别工具,具备以下核心功能与特点:技术架构使用预训练的ResNet50卷积神经网络模型(来自ImageNet数据集)集成图像增强预处理技术(随机裁剪、旋转、翻转等)采用多数投票机制提升预测稳定性基于置信度评分的结果筛选策略功能流程用户通过GUI界面选择待识别图
- YOLOv11 技术详解:架构优化与性能提升
代码老y
YOLO架构目标跟踪
YOLOv11是目标检测领域中一个备受瞩目的新版本,它在保持实时性的同时,显著提升了检测的准确性和效率。本文将深入探讨YOLOv11的架构改进、性能优化以及它在不同应用场景中的表现。一、架构改进(一)C3K2块YOLOv11引入了C3K2块,这是对之前版本中CSP(CrossStagePartial)块的增强。C3K2块使用不同的核大小(例如3x3或5x5)和通道分离策略来优化更复杂特征的提取。这
- OpenCV图片操作100例:从入门到精通指南(1)
总有刁民想爱朕ha
opencv计算机视觉人工智能
OpenCV图片操作100例:从入门到精通指南本文整理了100个OpenCV实用技巧,涵盖图像处理各个领域,助你轻松掌握计算机视觉核心技能!一、入门必备:基础操作1.图像读写与显示importcv2#读取图像(BGR格式)img=cv2.imread('image.jpg')#显示图像cv2.imshow('示例图片',img)cv2.waitKey(0)#按任意键退出cv2.destroyAll
- OpenCV图片操作100例:从入门到精通指南(3)
总有刁民想爱朕ha
opencv人工智能计算机视觉
高效学习路径:1️⃣分阶段学习:入门:1-20例(基础操作)进阶:21-50例(图像处理)高级:51-100例(计算机视觉)2️⃣项目驱动学习:证件照背景替换(1-15例)停车场车位检测(30-45例)视频运动追踪(70-85例)3️⃣性能优化技巧:#使用UMat加速图像处理umat_img=cv2.UMat(img)processed=cv2.GaussianBlur(umat_img,(5,5
- YOLO11 目标检测从安装到实战
前言YOLO(YouOnlyLookOnce)系列是目标检测领域的经典算法,凭借速度快、精度高的特点被广泛应用。最新的YOLO11在模型结构和性能上进一步优化,本文将从环境搭建到实战应用,详细讲解YOLO11的使用方法,适合新手快速上手。一、环境准备1.系统要求操作系统:Windows10/11、Ubuntu20.04+、欧拉系统等硬件:CPU可运行,GPU(NVIDIA)可加速(推荐,需支持CU
- Python OpenCV教程从入门到精通的全面指南【文末送书】
一键难忘
pythonopencv开发语言
文章目录PythonOpenCV从入门到精通1.安装OpenCV2.基本操作2.1读取和显示图像2.2图像基本操作3.图像处理3.1图像转换3.2图像阈值处理3.3图像平滑4.边缘检测和轮廓4.1Canny边缘检测4.2轮廓检测5.高级操作5.1特征检测5.2目标跟踪5.3深度学习与OpenCVPythonOpenCV从入门到精通【文末送书】PythonOpenCV从入门到精通OpenCV(Ope
- OpenCV入门到精通:AI视觉处理的完整指南
AI云原生与云计算技术学院
人工智能opencv计算机视觉ai
OpenCV入门到精通:AI视觉处理的完整指南关键词:OpenCV、计算机视觉、图像预处理、目标检测、AI视觉应用摘要:本文是一份面向AI视觉爱好者的OpenCV完整学习指南。从OpenCV的核心概念讲起,结合生活案例、代码示例和项目实战,逐步拆解图像读取/显示、灰度化、边缘检测、目标检测等关键技术。无论你是想入门计算机视觉的新手,还是希望用OpenCV解决实际问题的开发者,都能通过本文掌握从理论
- CNN 猫狗识别:从理论到实战的深度解析
爱熬夜的小古
cnn深度学习人工智能
在计算机视觉领域,卷积神经网络(ConvolutionalNeuralNetwork,CNN)凭借其强大的特征提取和模式识别能力,成为图像分类任务的主流技术。猫狗识别作为经典的图像分类问题,不仅能帮助我们理解CNN的工作原理,还能为实际应用提供技术支持。本文将深入探讨CNN在猫狗识别中的应用,从理论基础到实战代码,带你全面掌握这项技术。一、CNN基础理论概述(一)CNN的核心组件卷积层:是CNN的
- OpenCV入门到精通:从基础到实战的全面指南
摘要:本文旨在为初学者和有一定经验的开发者提供OpenCV从入门到精通的全面指南。文章首先介绍了OpenCV的基本概念和安装方法,然后深入讲解了图像处理基础、特征检测与匹配、视频处理与分析等核心内容,最后通过实战案例展示了OpenCV在计算机视觉任务中的应用。关键词:OpenCV;图像处理;特征检测;视频分析;实战案例引言OpenCV(OpenSourceComputerVisionLibrary
- 第八周 tensorflow实现猫狗识别
降花绘
365天深度学习tensorflow系列tensorflow深度学习人工智能
本文为365天深度学习训练营内部限免文章(版权归K同学啊所有)**参考文章地址:[TensorFlow入门实战|365天深度学习训练营-第8周:猫狗识别(训练营内部成员可读)]**作者:K同学啊文章目录一、本周学习内容:1、自己搭建VGG16网络2、了解model.train_on_batch()3、了解tqdm,并使用tqdm实现可视化进度条二、前言三、电脑环境四、前期准备1、导入相关依赖项2、
- 深度学习实战-使用TensorFlow与Keras构建智能模型
程序员Gloria
Python超入门TensorFlowpython
深度学习实战-使用TensorFlow与Keras构建智能模型深度学习已经成为现代人工智能的重要组成部分,而Python则是实现深度学习的主要编程语言之一。本文将探讨如何使用TensorFlow和Keras构建深度学习模型,包括必要的代码实例和详细的解析。1.深度学习简介深度学习是机器学习的一个分支,使用多层神经网络来学习和表示数据中的复杂模式。其广泛应用于图像识别、自然语言处理、推荐系统等领域。
- AI在垂直领域的深度应用:医疗、金融与自动驾驶的革新之路
AI在垂直领域的深度应用:医疗、金融与自动驾驶的革新之路一、医疗领域:AI驱动的精准诊疗与效率提升1.医学影像诊断AI算法通过深度学习技术,已实现对X光、CT、MRI等影像的快速分析,辅助医生检测癌症、骨折等疾病。例如,GoogleDeepMind的AI系统在乳腺癌筛查中,误检率比人类专家低9.4%;中国的推想医疗AI系统可在20秒内完成肺部CT扫描分析,为急诊救治争取黄金时间。2.药物研发传统药
- 目前主流图像分类模型的详细对比分析
@comefly
闲聊linux运维服务器
以下是目前主流图像分类模型的详细对比分析,结合性能、架构特点及应用场景进行整理:一、主流模型架构分类与定量对比模型名称架构类型核心特点ImageNetTop-1准确率参数量(百万)计算效率典型应用场景ResNetCNN残差连接解决梯度消失,支持超深网络(如ResNet-152)76.1%25.6中等通用分类、目标检测ViTTransformer将图像分割为patches,用标准Transforme
- 专题:2025云计算与AI技术研究趋势报告|附200+份报告PDF、原数据表汇总下载
原文链接:https://tecdat.cn/?p=42935关键词:2025,云计算,AI技术,市场趋势,深度学习,公有云,研究报告云计算和AI技术正以肉眼可见的速度重塑商业世界。过去十年,全球云服务收入激增8倍,中国云计算市场规模突破6000亿元,而深度学习算法的应用量更是暴涨400倍。这些数字背后,是企业从“自建机房”到“云原生开发”的转型,是AI从“实验室”走向“产业级应用”的跨越。本报告
- java线程的无限循环和退出
3213213333332132
java
最近想写一个游戏,然后碰到有关线程的问题,网上查了好多资料都没满足。
突然想起了前段时间看的有关线程的视频,于是信手拈来写了一个线程的代码片段。
希望帮助刚学java线程的童鞋
package thread;
import java.text.SimpleDateFormat;
import java.util.Calendar;
import java.util.Date
- tomcat 容器
BlueSkator
tomcatWebservlet
Tomcat的组成部分 1、server
A Server element represents the entire Catalina servlet container. (Singleton) 2、service
service包括多个connector以及一个engine,其职责为处理由connector获得的客户请求。
3、connector
一个connector
- php递归,静态变量,匿名函数使用
dcj3sjt126com
PHP递归函数匿名函数静态变量引用传参
<!doctype html>
<html lang="en">
<head>
<meta charset="utf-8">
<title>Current To-Do List</title>
</head>
<body>
- 属性颜色字体变化
周华华
JavaScript
function changSize(className){
var diva=byId("fot")
diva.className=className;
}
</script>
<style type="text/css">
.max{
background: #900;
color:#039;
- 将properties内容放置到map中
g21121
properties
代码比较简单:
private static Map<Object, Object> map;
private static Properties p;
static {
//读取properties文件
InputStream is = XXX.class.getClassLoader().getResourceAsStream("xxx.properti
- [简单]拼接字符串
53873039oycg
字符串
工作中遇到需要从Map里面取值拼接字符串的情况,自己写了个,不是很好,欢迎提出更优雅的写法,代码如下:
import java.util.HashMap;
import java.uti
- Struts2学习
云端月影
最近开始关注struts2的新特性,从这个版本开始,Struts开始使用convention-plugin代替codebehind-plugin来实现struts的零配置。
配置文件精简了,的确是简便了开发过程,但是,我们熟悉的配置突然disappear了,真是一下很不适应。跟着潮流走吧,看看该怎样来搞定convention-plugin。
使用Convention插件,你需要将其JAR文件放
- Java新手入门的30个基本概念二
aijuans
java新手java 入门
基本概念: 1.OOP中唯一关系的是对象的接口是什么,就像计算机的销售商她不管电源内部结构是怎样的,他只关系能否给你提供电就行了,也就是只要知道can or not而不是how and why.所有的程序是由一定的属性和行为对象组成的,不同的对象的访问通过函数调用来完成,对象间所有的交流都是通过方法调用,通过对封装对象数据,很大限度上提高复用率。 2.OOP中最重要的思想是类,类是模板是蓝图,
- jedis 简单使用
antlove
javarediscachecommandjedis
jedis.RedisOperationCollection.java
package jedis;
import org.apache.log4j.Logger;
import redis.clients.jedis.Jedis;
import java.util.List;
import java.util.Map;
import java.util.Set;
pub
- PL/SQL的函数和包体的基础
百合不是茶
PL/SQL编程函数包体显示包的具体数据包
由于明天举要上课,所以刚刚将代码敲了一遍PL/SQL的函数和包体的实现(单例模式过几天好好的总结下再发出来);以便明天能更好的学习PL/SQL的循环,今天太累了,所以早点睡觉,明天继续PL/SQL总有一天我会将你永远的记载在心里,,,
函数;
函数:PL/SQL中的函数相当于java中的方法;函数有返回值
定义函数的
--输入姓名找到该姓名的年薪
create or re
- Mockito(二)--实例篇
bijian1013
持续集成mockito单元测试
学习了基本知识后,就可以实战了,Mockito的实际使用还是比较麻烦的。因为在实际使用中,最常遇到的就是需要模拟第三方类库的行为。
比如现在有一个类FTPFileTransfer,实现了向FTP传输文件的功能。这个类中使用了a
- 精通Oracle10编程SQL(7)编写控制结构
bijian1013
oracle数据库plsql
/*
*编写控制结构
*/
--条件分支语句
--简单条件判断
DECLARE
v_sal NUMBER(6,2);
BEGIN
select sal into v_sal from emp
where lower(ename)=lower('&name');
if v_sal<2000 then
update emp set
- 【Log4j二】Log4j属性文件配置详解
bit1129
log4j
如下是一个log4j.properties的配置
log4j.rootCategory=INFO, stdout , R
log4j.appender.stdout=org.apache.log4j.ConsoleAppender
log4j.appender.stdout.layout=org.apache.log4j.PatternLayout
log4j.appe
- java集合排序笔记
白糖_
java
public class CollectionDemo implements Serializable,Comparable<CollectionDemo>{
private static final long serialVersionUID = -2958090810811192128L;
private int id;
private String nam
- java导致linux负载过高的定位方法
ronin47
定位java进程ID
可以使用top或ps -ef |grep java
![图片描述][1]
根据进程ID找到最消耗资源的java pid
比如第一步找到的进程ID为5431
执行
top -p 5431 -H
![图片描述][2]
打印java栈信息
$ jstack -l 5431 > 5431.log
在栈信息中定位具体问题
将消耗资源的Java PID转
- 给定能随机生成整数1到5的函数,写出能随机生成整数1到7的函数
bylijinnan
函数
import java.util.ArrayList;
import java.util.List;
import java.util.Random;
public class RandNFromRand5 {
/**
题目:给定能随机生成整数1到5的函数,写出能随机生成整数1到7的函数。
解法1:
f(k) = (x0-1)*5^0+(x1-
- PL/SQL Developer保存布局
Kai_Ge
近日由于项目需要,数据库从DB2迁移到ORCAL,因此数据库连接客户端选择了PL/SQL Developer。由于软件运用不熟悉,造成了很多麻烦,最主要的就是进入后,左边列表有很多选项,自己删除了一些选项卡,布局很满意了,下次进入后又恢复了以前的布局,很是苦恼。在众多PL/SQL Developer使用技巧中找到如下这段:
&n
- [未来战士计划]超能查派[剧透,慎入]
comsci
计划
非常好看,超能查派,这部电影......为我们这些热爱人工智能的工程技术人员提供一些参考意见和思想........
虽然电影里面的人物形象不是非常的可爱....但是非常的贴近现实生活....
&nbs
- Google Map API V2
dai_lm
google map
以后如果要开发包含google map的程序就更麻烦咯
http://www.cnblogs.com/mengdd/archive/2013/01/01/2841390.html
找到篇不错的文章,大家可以参考一下
http://blog.sina.com.cn/s/blog_c2839d410101jahv.html
1. 创建Android工程
由于v2的key需要G
- java数据计算层的几种解决方法2
datamachine
javasql集算器
2、SQL
SQL/SP/JDBC在这里属于一类,这是老牌的数据计算层,性能和灵活性是它的优势。但随着新情况的不断出现,单纯用SQL已经难以满足需求,比如: JAVA开发规模的扩大,数据量的剧增,复杂计算问题的涌现。虽然SQL得高分的指标不多,但都是权重最高的。
成熟度:5星。最成熟的。
- Linux下Telnet的安装与运行
dcj3sjt126com
linuxtelnet
Linux下Telnet的安装与运行 linux默认是使用SSH服务的 而不安装telnet服务 如果要使用telnet 就必须先安装相应的软件包 即使安装了软件包 默认的设置telnet 服务也是不运行的 需要手工进行设置 如果是redhat9,则在第三张光盘中找到 telnet-server-0.17-25.i386.rpm
- PHP中钩子函数的实现与认识
dcj3sjt126com
PHP
假如有这么一段程序:
function fun(){
fun1();
fun2();
}
首先程序执行完fun1()之后执行fun2()然后fun()结束。
但是,假如我们想对函数做一些变化。比如说,fun是一个解析函数,我们希望后期可以提供丰富的解析函数,而究竟用哪个函数解析,我们希望在配置文件中配置。这个时候就可以发挥钩子的力量了。
我们可以在fu
- EOS中的WorkSpace密码修改
蕃薯耀
修改WorkSpace密码
EOS中BPS的WorkSpace密码修改
>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
蕃薯耀 201
- SpringMVC4零配置--SpringSecurity相关配置【SpringSecurityConfig】
hanqunfeng
SpringSecurity
SpringSecurity的配置相对来说有些复杂,如果是完整的bean配置,则需要配置大量的bean,所以xml配置时使用了命名空间来简化配置,同样,spring为我们提供了一个抽象类WebSecurityConfigurerAdapter和一个注解@EnableWebMvcSecurity,达到同样减少bean配置的目的,如下:
applicationContex
- ie 9 kendo ui中ajax跨域的问题
jackyrong
AJAX跨域
这两天遇到个问题,kendo ui的datagrid,根据json去读取数据,然后前端通过kendo ui的datagrid去渲染,但很奇怪的是,在ie 10,ie 11,chrome,firefox等浏览器中,同样的程序,
浏览起来是没问题的,但把应用放到公网上的一台服务器,
却发现如下情况:
1) ie 9下,不能出现任何数据,但用IE 9浏览器浏览本机的应用,却没任何问题
- 不要让别人笑你不能成为程序员
lampcy
编程程序员
在经历六个月的编程集训之后,我刚刚完成了我的第一次一对一的编码评估。但是事情并没有如我所想的那般顺利。
说实话,我感觉我的脑细胞像被轰炸过一样。
手慢慢地离开键盘,心里很压抑。不禁默默祈祷:一切都会进展顺利的,对吧?至少有些地方我的回答应该是没有遗漏的,是不是?
难道我选择编程真的是一个巨大的错误吗——我真的永远也成不了程序员吗?
我需要一点点安慰。在自我怀疑,不安全感和脆弱等等像龙卷风一
- 马皇后的贤德
nannan408
马皇后不怕朱元璋的坏脾气,并敢理直气壮地吹耳边风。众所周知,朱元璋不喜欢女人干政,他认为“后妃虽母仪天下,然不可使干政事”,因为“宠之太过,则骄恣犯分,上下失序”,因此还特地命人纂述《女诫》,以示警诫。但马皇后是个例外。
有一次,马皇后问朱元璋道:“如今天下老百姓安居乐业了吗?”朱元璋不高兴地回答:“这不是你应该问的。”马皇后振振有词地回敬道:“陛下是天下之父,
- 选择某个属性值最大的那条记录(不仅仅包含指定属性,而是想要什么属性都可以)
Rainbow702
sqlgroup by最大值max最大的那条记录
好久好久不写SQL了,技能退化严重啊!!!
直入主题:
比如我有一张表,file_info,
它有两个属性(但实际不只,我这里只是作说明用):
file_code, file_version
同一个code可能对应多个version
现在,我想针对每一个code,取得它相关的记录中,version 值 最大的那条记录,
SQL如下:
select
*
- VBScript脚本语言
tntxia
VBScript
VBScript 是基于VB的脚本语言。主要用于Asp和Excel的编程。
VB家族语言简介
Visual Basic 6.0
源于BASIC语言。
由微软公司开发的包含协助开发环境的事
- java中枚举类型的使用
xiao1zhao2
javaenum枚举1.5新特性
枚举类型是j2se在1.5引入的新的类型,通过关键字enum来定义,常用来存储一些常量.
1.定义一个简单的枚举类型
public enum Sex {
MAN,
WOMAN
}
枚举类型本质是类,编译此段代码会生成.class文件.通过Sex.MAN来访问Sex中的成员,其返回值是Sex类型.
2.常用方法
静态的values()方
是目标总类数量。
代表的是真实标签值,
为预测值。
。
计算:
的
的
的
的
是平衡系数,用于平衡我们的分类损失和边界框回归损失,
是艾弗森括号,即
时它为1,反之为0。







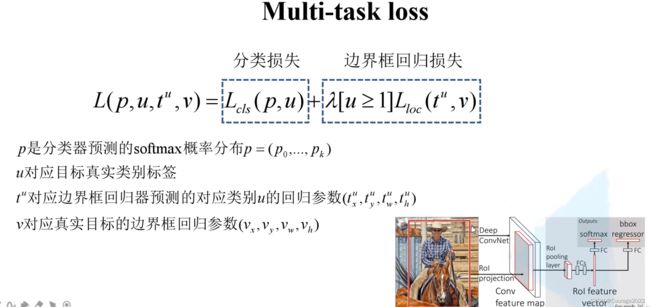




代表通过回归层预测出来的并不是计算出来的,那些带*的是根据anchor所对应的真实的ground-truth以及anchor的坐标计算出来的。