迷宫问题 深度优先搜索 广度优先搜索 宽度优先搜索【python】
文章目录
- 一、实验内容
- 二、深度优先搜索和广度优先搜索总结
-
- 1.深度优先搜索算法
- 2.广度优先搜索算法
- 三、实验代码和用于测试的迷宫
-
- 1.实验代码
- 2.测试迷宫
-
- 2.1 maze1.txt
- 2.2 maze2.txt
- 2.3 maze3.txt
- 四、实验结果
-
- 1. maze1.txt
- 2. maze2.txt
- 3. maze3.txt
- 五、结果分析
- 总结
一、实验内容
- 下载mymaze.py文件maze1.txt,maze2.txt,maze3.txt以及requirements.txt几个文件,将它们放于同一个文件夹中,安装相应的环境定义。
- 读懂文件中所给的类和函数,请按照mymaze.py中的提示,补全代码,执行深度优先搜索和广度优先搜索的代码并对结果进行记录。
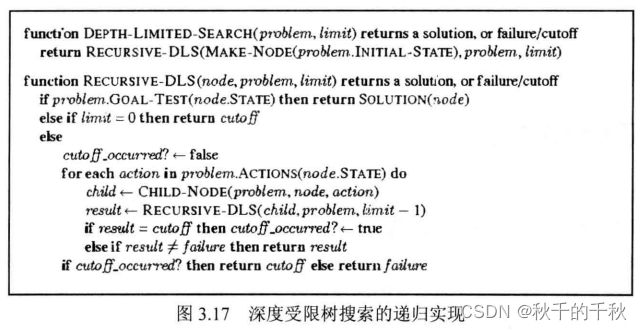
二、深度优先搜索和广度优先搜索总结
1.深度优先搜索算法
- 总是先扩展frontier表中最深的结点
- Frontier是一个栈结构——后进先出
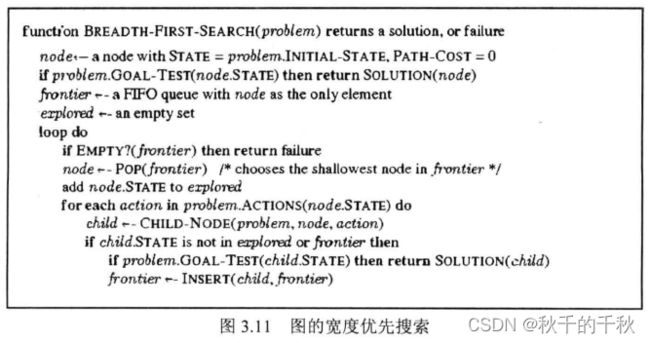
2.广度优先搜索算法
- 总是先扩展frontier表中最浅的结点
- Frontier是一个队列结构——先进先出
三、实验代码和用于测试的迷宫
1.实验代码
#!/usr/bin/python
# -*- coding:utf-8 -*-
class Node():
def __init__(self, state, parent, action):
self.state = state
self.parent = parent
self.action = action
class StackFrontier():
def __init__(self):
self.frontier = []
def add(self, node):
self.frontier.append(node)
def contains_state(self, state):
return any(node.state == state for node in self.frontier)
def empty(self):
return len(self.frontier) == 0
def remove(self):
if self.empty():
raise Exception("empty frontier")
else:
#please add your code here to get a node from the frontier, according to FIBO
#请在下面添加你的代码,从frontier表中按照后进先出的顺序移除一个结点,并将移除的结点给node
node = self.frontier[-1]
#after remove a node ,your frontier should adaptive accordingly
#在移除了一个结点后,你的frontier表应该相应的更新
del self.frontier[-1]
return node
class QueueFrontier(StackFrontier):
def remove(self):
if self.empty():
raise Exception("empty frontier")
else:
#请添加你的代码,按照先进先出的顺序移除结点
node = self.frontier[0]
#请更新frontier表,使得frontier表为移除了一个结点剩下的结点组成
del self.frontier[0]
return node
class Maze():
def __init__(self, filename):
# Read file and set height and width of maze
with open(filename) as f:
contents = f.read()
# Validate start and goal
if contents.count("A") != 1:
raise Exception("maze must have exactly one start point")
if contents.count("B") != 1:
raise Exception("maze must have exactly one goal")
# Determine height and width of maze
contents = contents.splitlines()
self.height = len(contents)
self.width = max(len(line) for line in contents)
# Keep track of walls
self.walls = []
for i in range(self.height):
row = []
for j in range(self.width):
try:
if contents[i][j] == "A":
self.start = (i, j)
row.append(False)
elif contents[i][j] == "B":
self.goal = (i, j)
row.append(False)
elif contents[i][j] == " ":
row.append(False)
else:
row.append(True)
except IndexError:
row.append(False)
self.walls.append(row)
self.solution = None
def print(self):
solution = self.solution[1] if self.solution is not None else None
print()
for i, row in enumerate(self.walls):
for j, col in enumerate(row):
if col:
print("#", end="")
elif (i, j) == self.start:
print("A", end="")
elif (i, j) == self.goal:
print("B", end="")
elif solution is not None and (i, j) in solution:
print("*", end="")
else:
print(" ", end="")
print()
print()
def neighbors(self, state):
row, col = state
candidates = [
("up", (row - 1, col)),
("down", (row + 1, col)),
("left", (row, col - 1)),
("right", (row, col + 1))
]
result = []
for action, (r, c) in candidates:
if 0 <= r < self.height and 0 <= c < self.width and not self.walls[r][c]:
result.append((action, (r, c)))
return result
def solve(self):
"""Finds a solution to maze, if one exists."""
# Keep track of number of states explored
self.num_explored = 0
# Initialize frontier to just the starting position
start = Node(state=self.start, parent=None, action=None)
#please add the frontier of stackfroniter or queuefrontier
#请声明栈结构或者队列的frontier实例
"""
每一次都改的地方!!!
"""
frontier = QueueFrontier()
#frontier = StackFrontier()
frontier.add(start)
# Initialize an empty explored set
self.explored = set()
# Keep looping until solution found
while True:
# If nothing left in frontier, then no path
if frontier.empty():
raise Exception("no solution")
# Choose a node from the frontier,please finish the sentence
node = frontier.remove()
self.num_explored += 1
# If node is the goal, then we have a solution
if node.state == self.goal:
actions = []
cells = []
while node.parent is not None:
actions.append(node.action)
cells.append(node.state)
node = node.parent
actions.reverse()
cells.reverse()
self.solution = (actions, cells)
return
# Mark node as explored
self.explored.add(node.state)
# Add neighbors to frontier
for action, state in self.neighbors(node.state):
if not frontier.contains_state(state) and state not in self.explored:
child = Node(state=state, parent=node, action=action)
frontier.add(child)
def output_image(self, filename, show_solution=True, show_explored=False):
from PIL import Image, ImageDraw
cell_size = 50
cell_border = 2
# Create a blank canvas
img = Image.new(
"RGBA",
(self.width * cell_size, self.height * cell_size),
"black"
)
draw = ImageDraw.Draw(img)
solution = self.solution[1] if self.solution is not None else None
for i, row in enumerate(self.walls):
for j, col in enumerate(row):
# Walls
if col:
fill = (40, 40, 40)
# Start
elif (i, j) == self.start:
fill = (255, 0, 0)
# Goal
elif (i, j) == self.goal:
fill = (0, 171, 28)
# Solution
elif solution is not None and show_solution and (i, j) in solution:
fill = (220, 235, 113)
# Explored
elif solution is not None and show_explored and (i, j) in self.explored:
fill = (212, 97, 85)
# Empty cell
else:
fill = (237, 240, 252)
# Draw cell
draw.rectangle(
([(j * cell_size + cell_border, i * cell_size + cell_border),
((j + 1) * cell_size - cell_border, (i + 1) * cell_size - cell_border)]),
fill=fill
)
img.save(filename)
"""if len(sys.argv) != 2:
sys.exit("Usage: python maze.py maze.txt")"""
m = Maze("maze3.txt")
print("Maze:")
m.print()
print("Solving...")
m.solve()
print("States Explored:", m.num_explored)
print("Solution:")
m.print()
m.output_image("maze3_广度优先.png", show_explored=True)
2.测试迷宫
2.1 maze1.txt
#####B#
##### #
#### #
#### ##
##
A######
2.2 maze2.txt
### #########
# ################### # #
# #### # # # #
# ################### # # # #
# # # # #
##################### # # # #
# ## # # # #
# # ## ### ## ######### # # #
# # # ##B# # # #
# # ## ################ # # #
### ## #### # # #
### ############## ## # # # #
### ## # # # #
###### ######## ####### # # #
###### #### # #
A ######################
2.3 maze3.txt
## #
## ## #
#B # #
# ## ##
##
A######
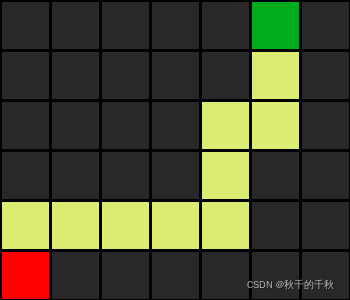
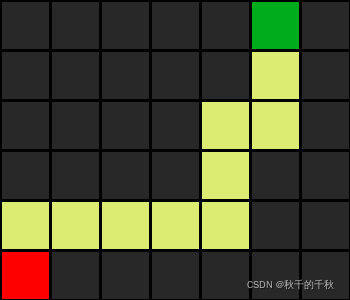
四、实验结果
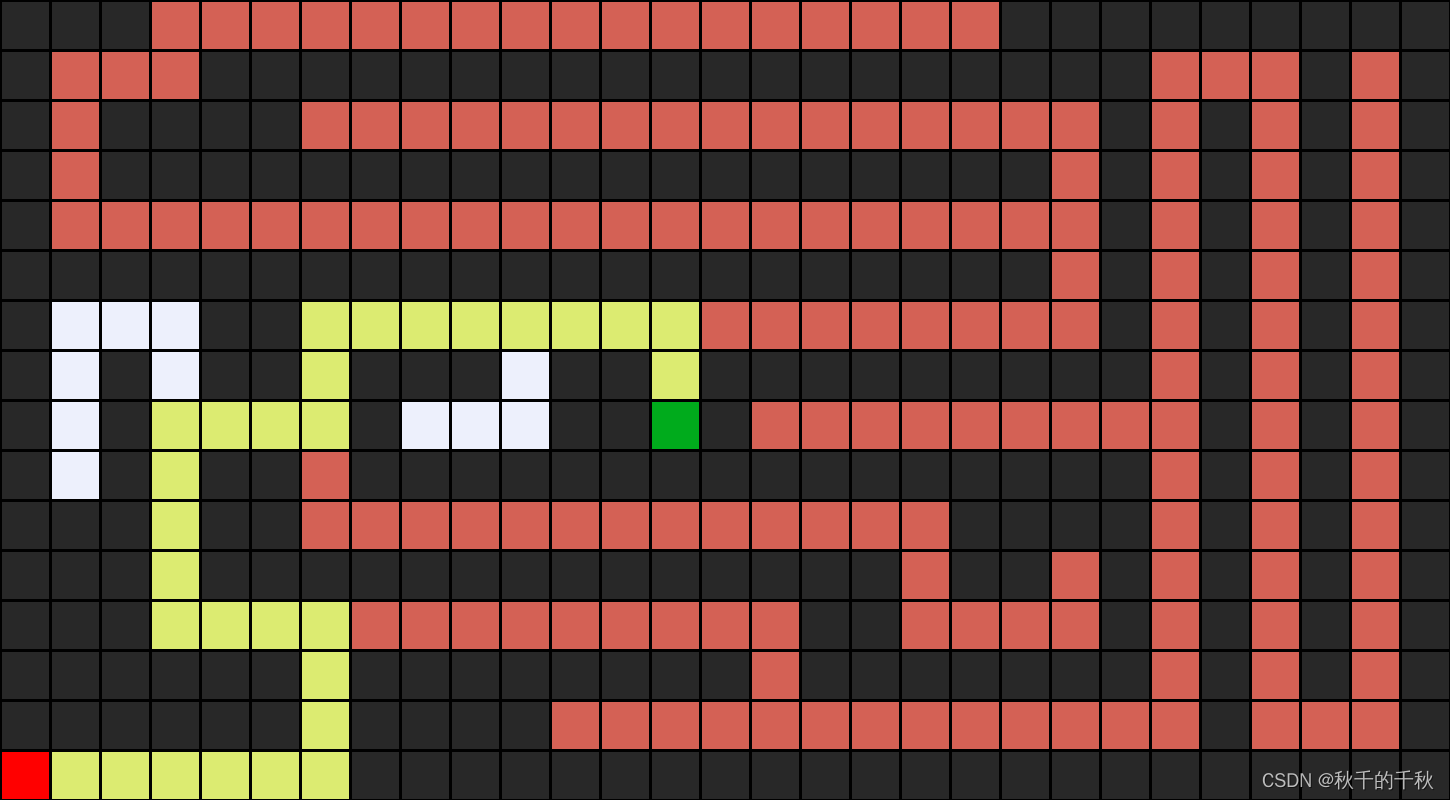
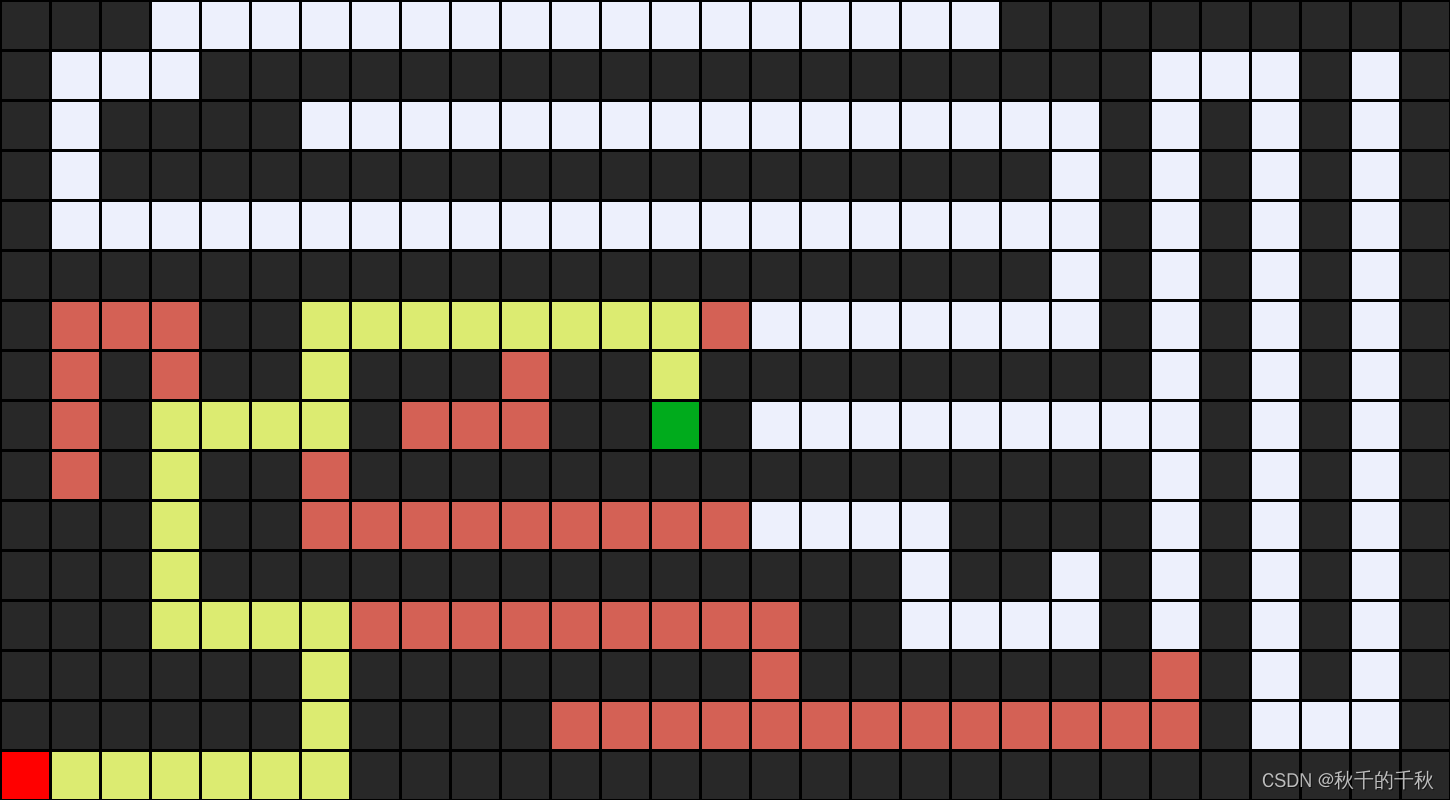
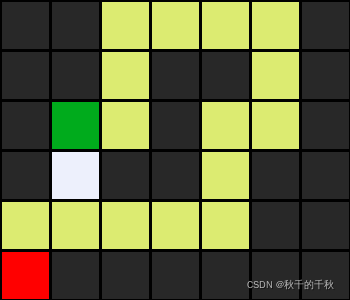
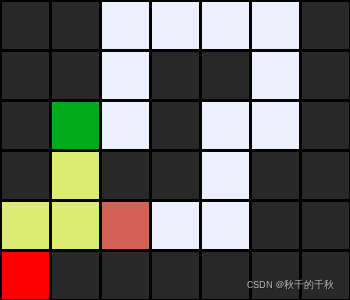
下图中黑色格子代表迷宫中的墙,深红色代表起点,深绿色代表终点,浅红色代表走过的错路,浅绿色代表走到正确的路线。
1. maze1.txt
- 深度优先算法结果
- 广度优先算法结果
2. maze2.txt
- 深度优先算法结果
- 广度优先算法结果
3. maze3.txt
- 深度优先算法结果
- 广度优先算法结果
五、结果分析
- 从完备性角度上分析:深度优先搜索和广度优先搜索都可以找到解。
- 从最优性角度上分析:深度优先搜索不一定能找到最优解,而广度优先搜索可以找到最优解。
- 从时间复杂度角度上分析:深度优先搜索跑了更多的结点所以它的时间复杂度比广度优先搜索高。
- 从空间复杂度角度上分析:广度优先搜索在找到最终结点之前需要记录所有已经走过的结点,所以空间复杂度要高一些。
总结
算法引自——人工智能 一种现代的方法(第3版)
代码源自网络,仅用于教学实验
本文来源于实验报告