电动汽车有序无序充放电的优化调度(Matlab代码实现)
欢迎来到本博客❤️❤️❤️
目前更新:电力系统相关知识,期刊论文,算法,机器学习和人工智能学习。

本文目录如下:⛳️⛳️⛳️
目录
1 全文概述
2 数学模型
3 Matlab实现
3.1 代码前的准备
然后:也是代码前的准备编辑
3.2 运行结果
编辑编辑编辑编辑
4 往期回顾
5 参考文献
6 Matlab代码实现
1 全文概述
汽车行业正在大力投资插电式混合动力汽车 (PHEV) 和全电动汽车 (EV),主要是为了减少当前汽车技术的二氧化碳排放和对石油的依赖。由于用电量的增加,汽车电气化将对电网产生重大影响。
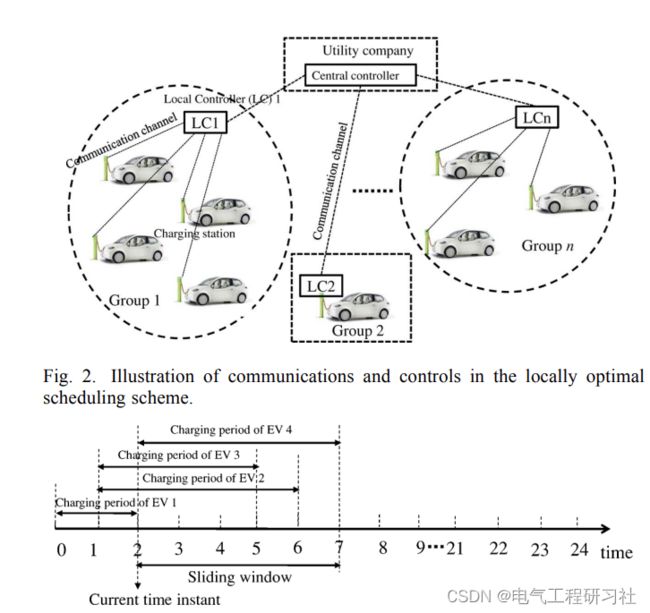
由于用电量的增加,汽车电气化将对电网产生重大影响。对电动汽车 (EV) 的充电和放电进行智能调度非常重要。然而,调度问题存在两个主要挑战。首先,寻找可以最小化总成本的全局最优调度解决方案具有挑战性。其次,很难找到能够处理大量人口和电动汽车随机到达的分布式调度方案。在本文中,我们提出了电动汽车充电和放电的全局最优调度方案和局部最优调度方案。首先制定了一个全局调度优化问题,其中优化充电功率以最小化所有在白天进行充电和放电的电动汽车的总成本。全局最优解提供全局最小总成本。然而,全局最优调度方案是不切实际的,因为它需要关于未来基本负载和到达时间以及将在一天中的未来时间到达的电动汽车的充电时间的信息。为了开发一个实用的调度方案,本文制定了一个局部调度优化问题,旨在最小化本地组中当前正在进行的 EV 集中 EV 的总成本。局部最优调度方案不仅可扩展到大型 EV 种群,而且对动态 EV 到达具有弹性。通过仿真,我们证明了与全局最优调度方案相比,局部最优调度方案可以实现接近的性能。
2 数学模型
详细数学模型和解释见第4部分。
3 Matlab实现
3.1 代码前的准备
安装CVX包:
安装方法:风电随机性动态经济调度模型
然后:也是代码前的准备
3.2 运行结果
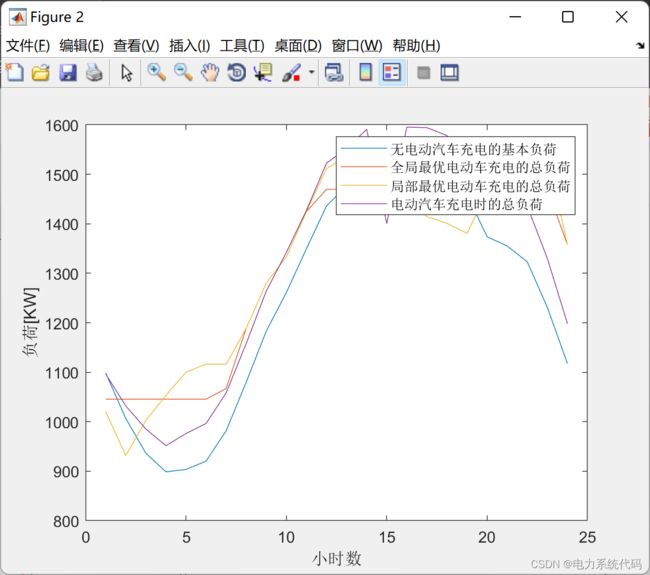



部分代码
close all;
clc;
clear;
%% 参数设置
%==(1)基本荷荷向量===
L_b=[
1648181.19
1510114.92
1404600.51
1348140.62
1355294.53
1380434.41
1472398.73
1619859.88
1774726.71
1891739.09
2024589.36
2154006.65
2214969.44
2248348.3
2257444.05
2253898.58
2251095.52
2240891.11
2187658.11
2060455.55
2032531.95
1984614.47
1846244.76
1676395.15];
%====(2)预测的基本负荷(平均相对误差 = 0.089)====
P_L_b1=[
1737223.863
1603267.075
1501043.33
1434323.708
1427034.265
1445808.13
1535646.84
1703557
1878913.403
2041190.428
2189203.243
2300813.958
2376838.56
2431838.998
2456820.033
2472628.88
2497750.498
2502256.753
2487853.418
2333072.535
2313458.498
2278059.543
2121749.573
1908084.005];
%====(3)预测的基本负荷(平均相对误差 = 0.0414)====
P_L_b2=[
1599948.91
1468345.518
1370502.199
1310946.046
1308525.559
1330298.288
1417044.254
1592177.276
1774327.31
1935791.394
2081450.673
2194127.508
2266347.528
2310264.895
2317806.969
2328853.886
2350763.395
2356239.943
2340220.599
2215920.234
2192252.838
2168526.739
2014122.374
1803843.804];
%=====(4)第二次预测的基本负荷(更好的预测)(平均相对误差=0.0234)===
P_L_b3=[
1648037.519
1458944.669
1366366.043
1310276.476
1309105.99
1329282.055
1411672.493
1587762.671
1728429.463
1888917.875
2032770.183
2133804.711
2199858.463
2240117.111
2241852.165
2245048.574
2259487.69
2260142.395
2243557.341
2145562.018
2122157.145
2104126.554
1948760.596
1740961.875];
%=====选择使用哪个预测负荷====
P_L_b=P_L_b2;
%% 微电网的基本负荷
Scale_factor=1/1500;
L_b_mic=L_b*Scale_factor; % 基本负荷
P_L_b_mic=P_L_b*Scale_factor; % 基本预测负荷
%% 价格模型
% alfa=1.0;
% theta=1;
omega=1.2*max(L_b_mic);
k_0=0.0001;
k_1=0.00012;
k_2=0;
%====(1)寿命缩减成本======
beta=0.001;
beta=0;
%===简单乘法计算=====
% k_con=alfa/(omega^theta*(theta+1));
%=====充电间隔时间======
tau=1; % 小时内
%=====充电间隔数========
num_slot=length(L_b_mic);
%====(2)基本价格=======
price_basic=zeros(num_slot,1); % 基于基本负荷的价格
for i=1:num_slot
price_basic(i)=k_0+k_1* L_b_mic(i);
end
fprintf('价格,最低价格=%g,最高价格=%g.\n',min(price_basic), max(price_basic));
%% 电动汽车EV容量
Cap_battery_org=16; % KWh
gamma=0.9; % 充电完成时电池的百分比
Cap_battery=gamma*Cap_battery_org;
%% ==最大充电率===
P_max=5; % KW
%% 电动汽车数量
num_EV=200;
% 仅给电池充电的电动汽车的百分比
P_Chg=0;
% CHG EVs数量
num_CHG_EV=round(P_Chg*num_EV); % CHG EV 将位于 EV 信息矩阵的前面部分。
% V2G EVs数量
num_V2G_EV=num_EV-num_CHG_EV;
%% 电动汽车充电模式
% 30% 的电动汽车在间隔 1 之前连接到充电站,其余的均匀分布
%EV矩阵:1) 到达时间,2) 出发时间,3) 初始能量,4) 充电周期,5) 最小充电时间%
% EV_info=zeros(num_EV,3);
%===间隔1前接入站的EVS百分比====
% Per_EV=0.1;
%=====其他车辆到达时间均匀分布在[ 1,20 ]之间======
% for i=1:num_EV
% temp_00=rand;
% if temp_00<=Per_EV
% T_arrival(i,1)=1;
% else
% T_arrival(i,1)=round(1 + (20-1).*rand);
% end
% end
%
%=====充电时间均匀分布在 [4, 12] 小时之间======
% T_charging= round(4 + (12-4).*rand(num_EV,1));
% T_charging=-1*sort(-1*T_charging);
%
% % the departure time
% for i=1:num_EV
% T_departure(i,1)=min(24, T_arrival(i,1)+T_charging(i,1));
% end
%====初始电量均匀分布在电池容量的[0 0.8]之间======
% Ini_percentage=0+ (0.8-0).*rand(num_EV,1);
% % fill the EV_info
% EV_info(:,1)=T_arrival;
% EV_info(:,2)=T_departure;
% EV_info(:,3)=Cap_battery_org*Ini_percentage;
%
% for i=1:num_EV
% EV_info(i,4)=EV_info(i,2)-EV_info(i,1)+1; % 充电周期
% EV_info(i,5)=EV_info(i,3)/P_max; % 最小充电时间
% if EV_info(i,4) < EV_info(i,5)
% fprintf('EV %g 充电时间不合理.\n',i);
% end
% end
%
% % save and load EV_info
% save EV_info.txt EV_info -ascii;
load EV_info.txt;
EV_info=EV_info(1:num_EV,:);
%% 电动汽车与充电间隔的关系
F=zeros(num_EV, num_slot);
G=ones(num_EV, num_slot);
for i=1:num_EV
for j=EV_info(i,1):EV_info(i,2)
F(i,j)=1;
G(i,j)=0;
end
end
F1=reshape(F',1,[]);
% F=ones(num_EV, num_slot);
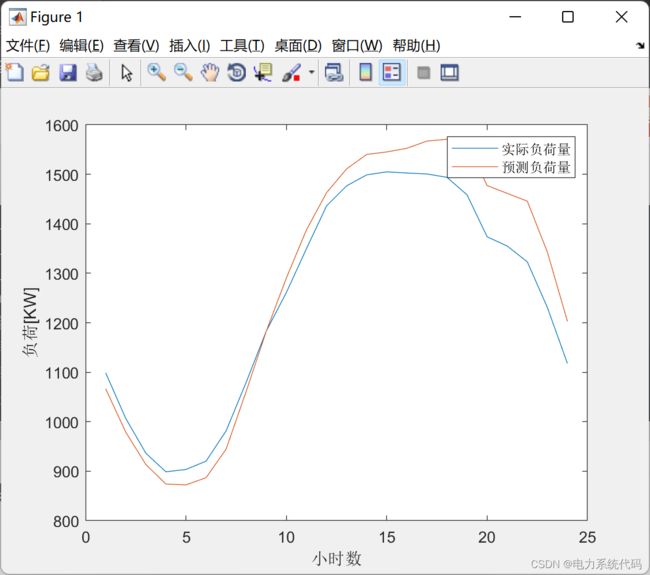
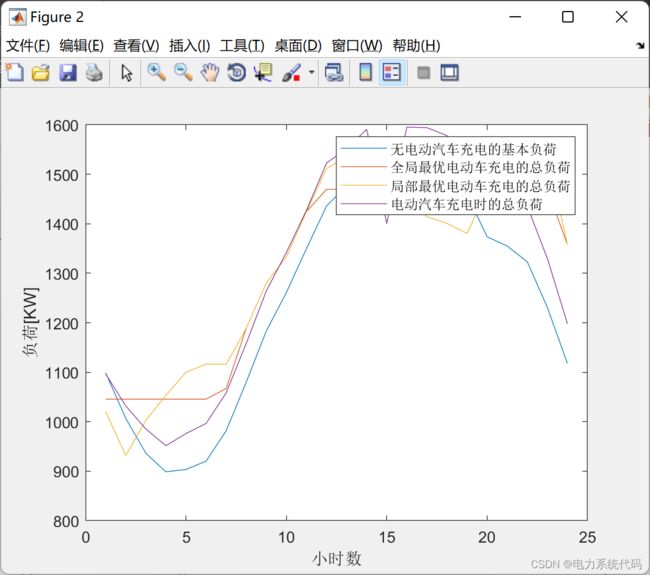
%% 绘制基本负荷
xx_1=1:num_slot;
figure;
yy_1(:,1)=L_b_mic;
yy_1(:,2)=P_L_b_mic;
plot(xx_1,yy_1);
ylabel('负荷[KW]');
xlabel('小时数');
legend('实际负荷量','预测负荷量');
%% 使用CVX工具的V2G全局最优方案
%(1)等式约束: Ax=b
% (2)优化变量x=[z1, z2, ..., z_24, x11, x12, ...., x_100,24]'
num_OptVar=1*num_slot+num_slot*num_EV;
b_a=L_b_mic; %第一个等式约束的矩阵
A1_a=zeros(num_slot, num_OptVar-1*num_slot);
A1=[eye(num_slot) A1_a];
A2_a=zeros(num_slot, num_OptVar-1*num_slot);
s_temp=0;
for i=1:num_slot
for j=1:num_EV
A2_a(i, (j-1)*num_slot+i)=F(j,i);
% fprintf('Assign F(%g,%g)=%g, to A2_a(%g, %g).\n',j,i,F(j,i),i,(j-1)*num_slot+1);
s_temp=s_temp+F(j,i);
end
end
A2_b=zeros(num_slot, num_slot);
A2=[A2_b A2_a];
A_a=A1-A2; % 第一个等式约束的矩阵
clear A1 A2 A1_a A2_a A2_b;
%======第一个等式约束的矩阵=====
B_1=zeros(num_EV, num_OptVar-1*num_slot);
for i=1:num_EV
B_1(i,(i-1)*num_slot+1:(i-1)*num_slot+num_slot)=F(i,:);
end
temp_1=zeros(num_EV, num_slot);
B1=[temp_1 B_1]; % 第二等式约束的矩阵
b_b=(Cap_battery/tau)*ones(num_EV,1)-EV_info(:,3);% 第二等式约束的矩阵
clear B_1 temp_1;
%合并等式矩阵
% Eq_left=[A_a' B1']';
% Eq_right=[b_a' b_b']';
%% ======等式约束=====
Eq_L=A_a;
Eq_R=b_a;
clear A_a b_a;
%% ======不等式约束=====
% ====1)第一个不等式约束=====
In_1=zeros(num_EV*num_slot, num_OptVar);
for i=1:num_slot
for j=1:num_EV
In_1((i-1)*num_EV+j,num_slot+(j-1)*num_slot+1:num_slot+(j-1)*num_slot+i)=F(j,1:i);
% fprintf('set row %g, col %g:%g by using F(%g,1:%g).\n',(i-1)*num_EV+j,num_slot+(j-1)*num_slot+1,num_slot+(j-1)*num_slot+i,j,i);
end
end
In_1=-1*In_1; % 第一个不等式,左边
In_b1=zeros(num_EV*num_slot, 1); % 第一个不等式,右边, [EV1_slot1, EV2_slot1, ..., EV1_slot2, EV2_slot2,...]'
for i=1:num_slot
In_b1( (i-1)*num_EV+1:(i-1)*num_EV+num_EV, 1 )= (1/tau)*EV_info(1:num_EV,3);
end
%=====2)第二个不等式约束=====
In_2=-1*In_1; %第二个不等式约束,左边
In_b2=zeros(num_EV*num_slot, 1); % 第二个不等式约束,右边, [EV1_slot1, EV2_slot1, ..., EV1_slot2, EV2_slot2,...]'
temp_b2=Cap_battery_org - EV_info(1:num_EV,3);
for i=1:num_slot
In_b2( (i-1)*num_EV+1:(i-1)*num_EV+num_EV, 1 )= (1/tau)*temp_b2;
''''''''''''
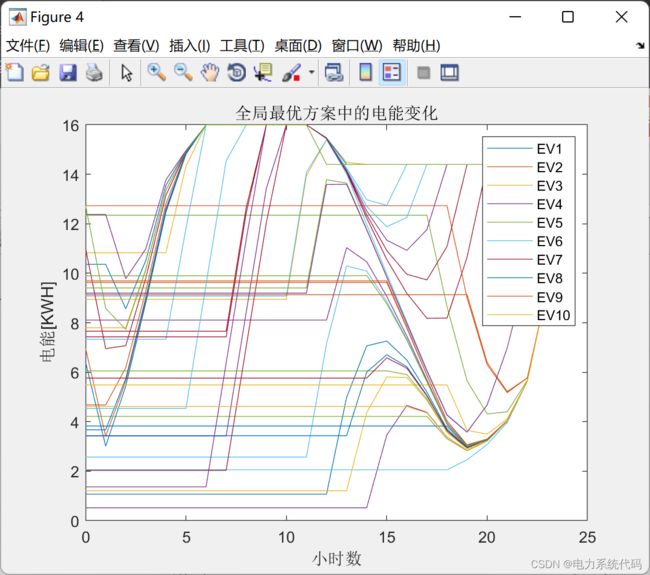
% 绘出每个电动车(全局最优方案)的电能水平演化图。
figure;
xxx=0:num_slot;
plot(xxx,v_Energy_variation(1:40,:));
ylabel('电能[KWH]');
xlabel('小时数');
legend('EV1','EV2','EV3','EV4','EV5','EV6','EV7','EV8','EV9','EV10');
title('全局最优方案中的电能变化');
% 绘制每个电动汽车的能量水平演化(局部最优方案)
figure;
xxx=0:num_slot;
plot(xxx,Energy_variation);
ylabel('电能[KWH]');
xlabel('小时数');
legend('EV1','EV2','EV3','EV4','EV5','EV6','EV7','EV8','EV9','EV10');
title('局部最优方案中的电能变化');
% 绘制每个EV的能量水平演化(等分配方案)
figure;
plot(xxx,N_Energy_variation);
ylabel('电能[KWH]');
xlabel('小时数');
legend('EV1','EV2','EV3','EV4','EV5','EV6','EV7','EV8','EV9','EV10');
title('均等分配最优方案中的电能变化');
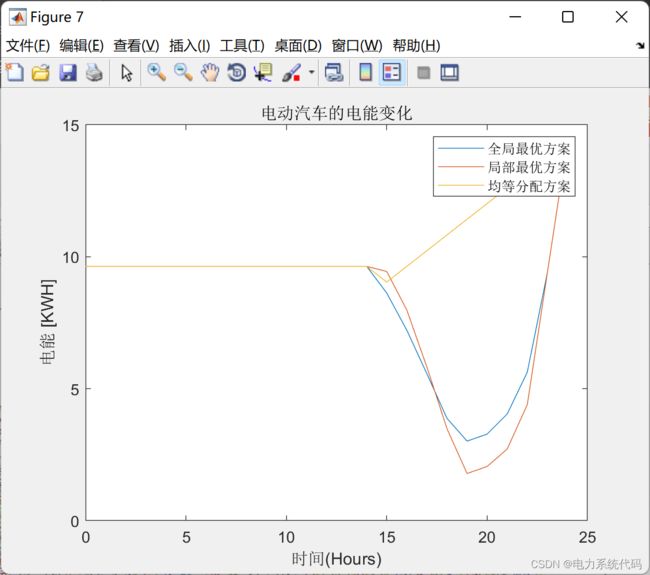
% %绘制每辆电动汽车的充电率
figure;
EV_ID=65;
energy_mmm(1,:)=v_Energy_variation(EV_ID,:);
energy_mmm(2,:)=Energy_variation(EV_ID,:);
energy_mmm(3,:)=N_Energy_variation(EV_ID,:);
plot(xxx,energy_mmm);
ylabel('电能 [KWH]');
xlabel('时间(Hours)');
legend('全局最优方案','局部最优方案','均等分配方案');
title('电动汽车的电能变化');
figure;
nnn(:,1)=v_x_Matrix(EV_ID,:)';%全局最优
nnn(:,2)=x_Matrix(EV_ID,:)';%局部最优
nnn(:,3)=N_x_Matrix(EV_ID,:)';%均等分配
h=bar(xx,nnn);
ylabel('速率[KW]');
xlabel('时间(Hours)');
legend('全局最优','局部最优','均等分配');
title('全局最优方案中的充放电速率');
4 往期回顾
| 模拟大规模电动车充电行为(Matlab实现) |
| 电动汽车对系统运行的影响(Matlab实现) |
| 基于蒙特卡洛法的规模化电动汽车充电负荷预测(Python&Matlab实现) |
| 基于电动汽车的带时间窗的路径优化(Python&Matlab代码实现) |
| (Matlab实现)基于蒙特卡诺和拉格朗日乘子法的电动车调度【有序、无序充放电】 |
5 参考文献
部分理论引用网络文献,若有侵权请联系博主删除。
电动汽车充放电的最佳调度|IEEE Journals & Magazine |IEEE Xplore
