tensorflow使用正则化和不使用正则化的区别(模型对比加个人分析)
最近有学一些机器学习的相关知识,就来讲一些tensorflow使用正则化和不使用正则化的区别
简介
——搭建一个简单的神经网络
——前向传播
——反向传播过程
——八股之正则化
什么是正则化呢?
正则化的概念及原因
简单来说,正则化是一种为了减小测试误差的行为(有时候会增加训练误差)。我们在构造机器学习模型时,最终目的是让模型在面对新数据的时候,可以有很好的表现。当你用比较复杂的模型比如神经网络,去拟合数据时,很容易出现过拟合现象,这会导致模型的泛化能力下降,这时候,我们就需要使用正则化,让训练出来的模型没有那么复杂。
(以上是正则化的概念)
我个人理解是:
机器在学习的过程中如果对一方面的处理(如图像识别)等方面做的非常的好,但是如果出现了新的情况却不能正确的响应,这就是过拟合现象——但是使用了正则化的方法,就可以在损失函数模型中引入复杂度指标,从而有效缓解过拟合现象。
|所以正则化是用来优化训练模型的一个方式
——来举个例子
import tensorflow as tf
import numpy as np
import matplotlib.pyplot as plt
# coding:utf-8
# 0导入模块 , 生成模拟数据集合
BATCH_SIZE = 30
seed = 2
# 基于seed产生随机数
rdm = np.random.RandomState(seed)
# 随机数返回300行2列的矩阵, 表示300组坐标点 (x0,x1) 座位输入数据集
X = rdm.randn(300, 2)
# 从X这个矩阵中取出一行,判断如果两个坐标的平方和小于2,给Y赋值1, 其余赋值0
# 作为输入数据集的表情 (正确答案)
Y_ = [int(x0 * x0 + x1 * x1 < 2) for (x0, x1) in X]
Y_c = [['red' if y else 'blue'] for y in Y_]
# 对数据集合X和标签Y进行shape整理, 第一个元素为 -1表示,随第二个参数计算得到,第二个元素
# 表示多少列, 把X整理为n行2列, 把Y整理为n行1列
X = np.vstack(X).reshape(-1, 2)
Y_ = np.vstack(Y_).reshape(-1, 1)
print(X)
print(Y_)
print(Y_c)
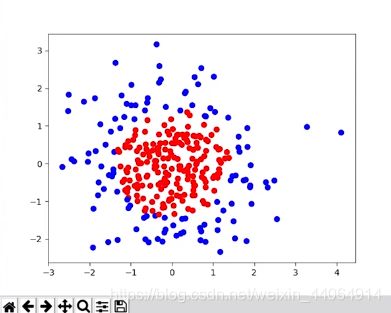
# 用plt.scatter画出数据集X各行中第0列元素和第1列元素的点即各行的(x0, x1),用各行Y_c对应
# 的值表示颜色(c是color的缩写) X[:, 0]的意思是取出横坐标x的第一列元素x0,后面的就是取出第二列x1
plt.scatter(X[:, 0], X[:, 1], c=np.squeeze(Y_c))
plt.show()
# 定义神经网络的输入、参数和输出,定义前向传播过程 (shape, regularizer—正则化权重—)
def get_weight(shape, regularizer):
w = tf.Variable(tf.random_normal(shape), dtype=tf.float32)
tf.add_to_collection('losses', tf.contrib.layers.l2_regualrizer(regularizer)(w))
return w
# 生成的偏置b
def get_bias(shape):
b = tf.Variable(tf.constant(0.01, shape=shape))
return b
# 占位
x = tf.placeholder(tf.float32, shape=(None, 2))
y_ = tf.placeholder(tf.float32, shape=(None, 1))
# w1: b1:获得偏值 y1:实现矩阵乘法
w1 = get_weight([2, 11], 0.01)
b1 = get_bias([11])
y1 = tf.nn.relu(tf.matmul(x, w1) + b1)
w2 = get_weight([11, 1], 0.01)
b2 = get_bias([1])
# 输出层不过激活
y = tf.matmul(y1, w2) + b2
# 定义损失函数
# mse是均方误差的损失函数
# total是计算 均方误差的损失函数加上每一个正则化w的损失
loss_mse = tf.reduce_mean(tf.square(y - y_))
loss_total = loss_mse + tf.add_n(tf.get_collection('losses'))
# 定义反向传播方法: 不含正则化 ->表示Adam优化器沿着均方误差最小的函数的方向上优化(不包含正则化)
train_step = tf.train.AdamOptimizer(0.0001).minimize(loss_mse)
with tf.Session() as sess:
init_op = tf.global_variables_initializer()
sess.run(init_op)
STEPS = 40000
for i in range(STEPS):
start = (i * BATCH_SIZE) % 300
end = start + BATCH_SIZE
sess.run(train_step, feed_dict={x: X[start:end], y_: Y_[start, end]})
if i % 2000 == 0:
loss_mse_v = sess.run(loss_mse, feed_dict={x: X, y_: Y_})
print("After %d steps, loss is: %f" % (i, loss_mse_v))
# xx在 -3到3之间以步长为0.01, yy在-3之间以步长0.01,生成二维网络坐标点
xx, yy = np.mgrid[-3:3:.01, -3:3:, .01]
# 将xx ,yy拉直,并合并成一个2列的矩阵,得到一个网络坐标点的集合
grid = np.c_[xx.ravel(), yy.ravel()]
# 将网络坐标点喂入神经网络,probs为输出
probs = sess.run(y, feed_dict={x: grid})
# probs = probs.reshape(xx.shape)
print("w1:\n", sess.run(w1))
print("b1:\n", sess.run(b1))
print("w2:\n", sess.run(w2))
print("b2:]n", sess.run(b2))
plt.scatter(X[:, 0], X[:, 1], c=np.squeeze(Y_c))
plt.contour(xx, yy, probs, levels=[.5])
plt.show()
# 定义反向传播方法:包含正则化
train_step = tf.train.AdamOptimizer(0.0001).minimize(loss_total)
with tf.Session() as sess:
init_op = tf.global_variables_initializer()
sess.run(init_op)
STEPS = 40000
for i in range(STEPS):
start = (i * BATCH_SIZE) % 300
end = start + BATCH_SIZE
sess.run(train_step, feed_dict={x: X[start:end], y_: Y_[start:end]})
if i % 20000 == 0:
loss_v = sess.run(loss_total, feed_dict={x: X, y_: Y_})
print("After %d steps, loss is: %f" % (i, loss_v))
xx, yy = np.mgrid[-3:3:.01, -3:3:.01]
grid = np.c_[xx.ravel(), yy.ravel()]
probs = sess.run(y, feed_dict={x: grid})
probs = probs.reshape(xx.shape)
print("w1:\n", sess.run(w1))
print("b1:\n", sess.run(b1))
print("w2:\n", sess.run(w2))
print("b2:\n", sess.run(b2))
plt.scatter(X[:, 0], X[:, 1], c=np.squeeze(Y_c))
plt.contour(xx, yy, probs, levels=[.5])
plt.show()
如图所示
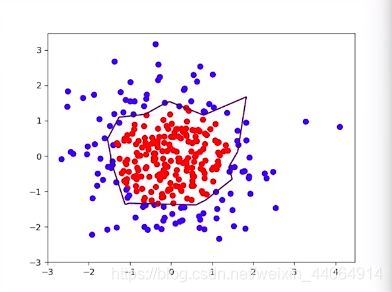
运行无正则化的模型 ?
运行有正则化的模型 ?
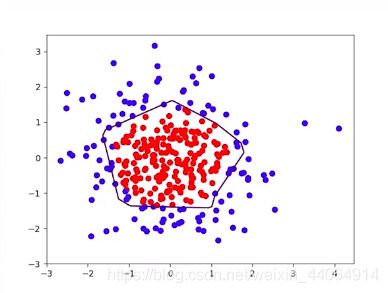
我们发现,相对于无正则化方法的模型来说,有正则化的模型过拟合程度更低(如图,更收敛了一些)
我github上有相关代码https://github.com/snfet
如果没有可能是我删了