3、速腾16线激光雷达RS-16 ----- 3D建图算法LeGO-LOAM的使用(Ubuntu18.04 + ROS Melodic)
Ubuntu18.04使用速腾16线激光雷达RS-16测试3D建图算法 LeGO-LOAM 的使用
-
- 1. 安装gtsam因子图库
- 2. 新建ROS工程目录文件夹,下载源码进行编译
- 3. 下载相关数据集进行测试
- 4. 使用速腾16线激光雷达RS-16进行实时建图
-
- 4.1 下载rslidar_sdk
- 4.2 雷达驱动环境安装
- 4.3 修改 CMakeLists.txt 和 package.xml
- 4.4 修改 config.yaml 参数
- 4.5 下载rs雷达话题转velodyne雷达话题源码
- 4.6 编译LeGO-LOAM
- 4.7 编译并运行所有节点和launch文件
- 5. 进行测试过程中遇到的相关问题及解决方案
运行环境
- Linux:Ubuntu18.04
- ros:Melodic
- Ceres Solver 2.0.0(Ubuntu18.04安装Ceres)
- PCL 1.8.1(Ubuntu系统的PCL、Eigen卸载和安装)
1. 安装gtsam因子图库
wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
cd ~/Downloads/ && unzip gtsam.zip -d ~/Downloads/
cd ~/Downloads/gtsam-4.0.0-alpha2/
mkdir build && cd build
cmake ..
sudo make install
2. 新建ROS工程目录文件夹,下载源码进行编译
- 新建工程文件
mkdir catkin_ws
cd catkin_ws
mkdir src
catkin_make
- 下载编译LeGO-LOAM
cd src
git clone https://github.com/RobustFieldAutonomyLab/LeGO-LOAM.git
cd ..
catkin_make -j1
3. 下载相关数据集进行测试
根据GitHub上面的测试集进行相对应的测试
- 下载相关的数据集,并进行测试。下载地址如下:
https://drive.google.com/drive/folders/16p5UPUCZ1uK0U4XE-hJKjazTsRghEMJa
source ~/devel/setup.bash
roslaunch lego_loam run.launch
rosbag play *.bag --clock --topic /velodyne_points /imu/data
4. 使用速腾16线激光雷达RS-16进行实时建图
4.1 下载rslidar_sdk
https://github.com/RoboSense-LiDAR/rslidar_sdk/releases
根据官网的介绍,下载 rslidar_sdk.tar.gz 压缩包
- 注意:不要下载Source code。 因为Source code压缩包内不包含子模块 rs_drive r的代码, 还需自行下载rs_driver的代码放入其中才行。

打开工作空间进入src文件夹下将下面的文件解压到此处,先不要编译
4.2 雷达驱动环境安装
安装pcap和Yaml:
sudo apt-get install -y libpcap-dev
sudo apt-get install -y libyaml-cpp-dev #若已安装ROS desktop-full, 可跳过
4.3 修改 CMakeLists.txt 和 package.xml
(1) 将文件顶部的set(COMPILE_METHOD ORIGINAL)改为set(COMPILE_METHOD CATKIN)
(2) 将set(POINT_TYPE XYZI)改为set(POINT_TYPE XYZIRT)
(3) 将rslidar_sdk工程目录下的package_ros1.xml文件重命名为package.xml
4.4 修改 config.yaml 参数
rslidar_sdk只有一份参数文件 config.yaml, 储存于rslidar_sdk/config文件夹内。打开此文件,找到以下部分:
idar:
- driver:
//此处修改激光雷达型号
lidar_type: RS128
frame_id: /rslidar
msop_port: 6699
difop_port: 7788
start_angle: 0
end_angle: 360
min_distance: 0.2
max_distance: 200
use_lidar_clock: false
激光雷达型号默认RS128,修改为自己的激光雷达型号即可
不修改则会报错,并且读取不到激光扫描参数:
- 下图为报错的图

作者使用的是16线的激光雷达,故修改如下,
lidar:
- driver:
lidar_type: RS16 #LiDAR type - RS16, RS32, RSBP, RS128, RS80, RSM1, RSHELIOS
frame_id: /rslidar #Frame id of message
msop_port: 6699 #Msop port of lidar
difop_port: 7788 #Difop port of lidar
start_angle: 0 #Start angle of point cloud
end_angle: 360 #End angle of point cloud
min_distance: 0.2 #Minimum distance of point cloud
max_distance: 200 #Maximum distance of point cloud
use_lidar_clock: false #True--Use the lidar clock as the message timestamp
#False-- Use the system clock as the timestamp
4.5 下载rs雷达话题转velodyne雷达话题源码
- 方法一:
下载地址:https://github.com/HViktorTsoi/rs_to_velodyne.git
并编译,可放在同个工作空间编译
- 方法二:使用 git 下载
cd ~/catkin_ws/src
git clone https://github.com/HViktorTsoi/rs_to_velodyne.git
cd ../
catkin_make
4.6 编译LeGO-LOAM
修改LeGO-LOAM的launch文件:
将这句话的true改成false
<param name="/use_sim_time" value="false"/>
4.7 编译并运行所有节点和launch文件
- 先运行雷达;
- 再运行
rs_to_velodyne节点(这里要注意LeGO-LOAM需要的雷达点云是XYZIR格式的,话题还是velodyne_points) - 最后运行lego_loam
catkin_make
source devel/setup.bash
roslaunch rslidar_sdk start.launch
rosrun rs_to_velodyne rs_tovelodyne XYZIRT XYZIR
roslaunch lego_loam run.launch
其中
rosrun rs_to_velodyne rs_to_velodyne XYZIRT XYZIR这个节点启动,可以该写成下面的launch文件进行启动。
在与src并列的位置新建launch文件夹,在launch文件夹内新建XX.launch文件用来启动节点,并在launch内写入如下。其中args="XYZIRT XYZIR"是Main函数的输入参数:XYZIRT、XYZIR,使用空格隔开参数。<launch> <node pkg="rs_to_velodyne" name="rs_to_velodyne" type="rs_to_velodyne" args="XYZIRT XYZIR" output="screen"> node> launch>
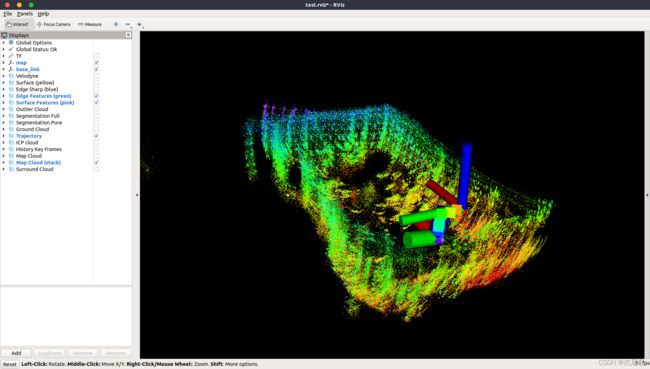
运行成功的图:
5. 进行测试过程中遇到的相关问题及解决方案
遇到的问题:[mapOptmization-7] process has died
原因:可能是libmetis 库没有安装,安装libparmetis-dev可以解决

解决方法:
sudo apt-get update
sudo apt-get install libparmetis-dev
使用参考链接2方法遇到的问题
遇到的问题:[ERROR] [1638358942.333987429]: Point cloud is not in dense format, please remove NaN points first!

解决方法:
找到utility.h将useCloudRIng设置为false
并重新编译
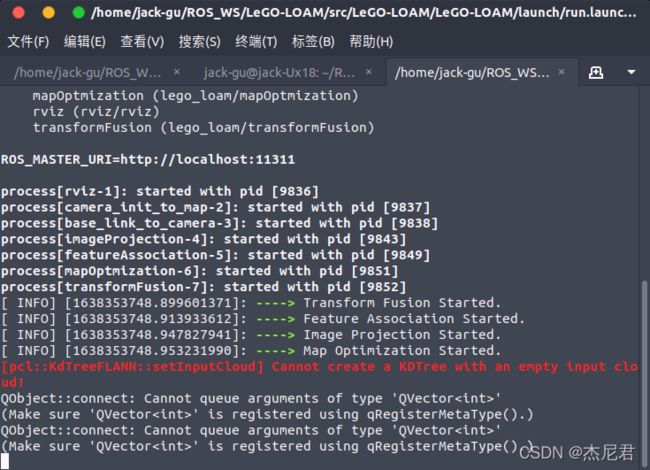
暂未解决,使用其它方法直接对速腾的雷达数据进行转换时遇到的问题
遇到的问题:[pcl::KdTreeFLANN::setInputCloud] Cannot create a KDTree with an empty input cloud!
原因:
该图为参考链接2处实现的建图效果

- 参考链接
- 1、九.激光SLAM框架学习之LeGO-LOAM框架—速腾Robosense-16线雷达室外建图和其他框架对比、录包和保存数据
- 2、https://blog.csdn.net/Zed_Of_Zoe/article/details/117254473