相机视场角和焦距_机器视觉基础(二):相机和镜头选型
在上一讲中,我们对相机的成像原理进行了解释,并推导了相机在三维空间中工作时所常用的几个坐标系的相互转换关系。本期将围绕着机器视觉中相机和镜头的选型进行讲解,解释在此过程中会频繁遇到的各种参数的含义。
1.相机选型
1.1 相机分类
相机根据构造,原理,参数规格等各种标准,在工业上有非常多的分类方式:
按芯片分类,可以可分为CCD相机和CMOS相机;
按传感器结构特性分类,可以分为线阵相机和面阵相机;
按扫描方式可以分为隔行扫描相机和隔行扫描相机;
按分辨率大小可以分为普通分辨率相机和高分辨率相机;
按输出信号方式可以分为模拟相机和数字相机;
按输出色彩可以分为单色相机和彩色相机。
下面我们着重介绍一下第一个分类,以助于大家理解现在我们所适用的数字相机是如何成像并生成图片文件的。
相机根据芯片的材料,相机可以分为CCD相机和CMOS相机。
首先是CCD相机,CCD(charged-coupled device),中文全称电荷耦合元件,是一种半导体器件,在1969年由美国贝尔实验室的Willard Boyle和George Smith所发明的,这个元件的特性是能够沿着表面传递电荷。于是可以根据这个特性,通过光电效应使元件的表面产生电荷从而组成数位影像。
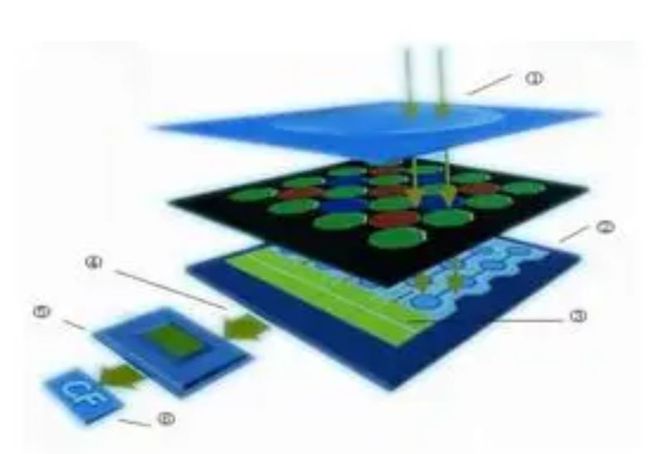
上图便是一个CCD相机成像过程的示意图,下面我简述这个成像过程。
我们用相机拍摄物体,物体反射的光线将通过镜头投射到CCD上,由此CCD曝光后,光电二极管由于光电效应,会释放出电荷,便在感光元件上产生了电流信号。此后CCD的控制芯片对这个电流信号进行控制,并通过电路将这一次成像产生的电流信号统一收集起来输出到放大器处,经过放大和滤波的处理后,A/D把模拟信号转换为数字信号,数值的大小和电信号的强度成正比,于是便得到了最原始的图像数字数据。

通过这个过程得到的数据还不能够直接生成图像,还要经过数字信号处理器(DSP),进行色彩校正、白平衡处理等各种后期处理,编码成最终的图像文件。
CCD是由大量独立的光敏元件所组成的,并以矩阵排列,通常以百万像素(megapixel)为单位,相机规格中的多少百万像素,指的便是CCD的分辨率。
而另一种相机,CMOS(Complementary Metal-Oxide Semiconductor)相机即互补性金属氧化物半导体,其和CCD一样都是可用来感受光线变化的半导体。了解了CCD相机的成像方式,我们也就更容易理解CMOS相机的成像原理,二者在原理上都是通过半导体感光并转换为电信号从而做到存储图像的功能。CMOS主要是利用硅和锗这两种元素所作成的半导体,通过CMOS上带负电和带正电的晶体管来实现基本的功能的。这两个互补效应所产生的电流即可被处理芯片记录和解读成影像。
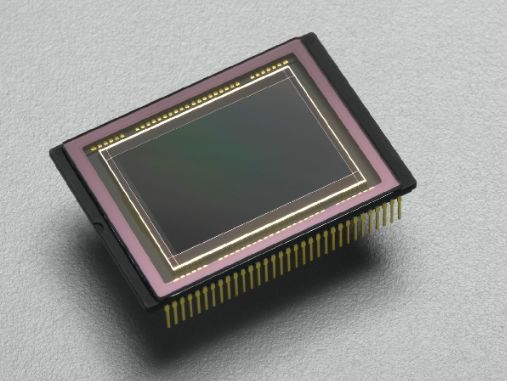
CMOS传感器
1.2 相机选型参数
首先给出与前面我们介绍的CCD和CMOS相机成像过程直接相关的几个参数
1) 分辨率(Resolution): 单次采集图像的像素点数,工业相机与光电传感器的像元数对应,即之前我们提到的一个光敏元件就对应一个像素。
2) 像元尺寸(Pixel size):像元尺寸指芯片的像元阵列上每个像元的实际物理尺寸,通常的尺寸包括14um,10um,9um , 7um ,6.45um ,3.75um 等。像元尺寸从某种程度上反映了芯片的对光的响应能力,像元尺寸越大,能够接收到的光子数量越多,在同样的光照条件和曝光时间内产生的电荷数量越多。对于弱光成像而言,像元尺寸是芯片灵敏度的一种表征。
3) 靶面尺寸(Chart Size):通常意义上的靶面尺寸就是CCD或CMOS的对角线尺寸,我们常用的CCD或者CMOS有1、2/3、1/2、1/3、1/4英寸(1英寸为16mm),如果给定了像元尺寸和分辨率,我们可以计算出靶面尺寸,如某相机的分辨率为2588 x1940的500万像素,像元大小为2.2um,则其传感器的尺寸为2588 x 2.2=5694um=5.694mm,宽方向为1940 x 2.2=4268um=4.268mm,即为1/2.5英寸的传感器。当然,现在的传感器像素一般是正方形的像素,如果是矩形的像素,则分别使用像素长乘分辨率的长、像素宽分辨率的宽即可。按照后面这种像素乘分辨率计算得到的靶面大小是肯定准确的。
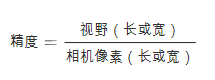
当我们进行实际的相机选型时,我们一般是根据需求的精度而来的,那么便可以用下面的这个计算公式:
2. 镜头选型
2.1 镜头分类
与相机一样,镜头同样的可以有多种分类方式:
1) 按镜头结构分类:固定光圈定焦镜头、手动光圈定焦镜头、自动光圈定焦镜头、手动光圈变焦镜头、自动光圈电动变焦镜头、电动三可变镜头。
固定光圈定焦镜头,即镜头只有一个可以手动调整的对焦调整环,左右旋转该环可使成像在 CCD靶面上的图像最清晰;没有光圈调整环,光圈不能调整,进入镜头的光通量不能通过改变镜头因素而改变,只能通过改变视场的光照度来调整。结构简单,价格便宜。

手动光圈定焦镜头比固定光圈定焦镜头增加了光圈调整环,光圈范围一般从F1.2或F1.4到全关闭,能方便地适应被被摄现场地光照度,光圈调整是通过手动人为进行的。光照度比较均匀,价格较便宜。

自动光圈电动变焦镜头,与自动光圈定焦镜头相比增加了两个微型电机,其中一个电机与镜头的变焦环合,当其转动时可以控制镜头的焦距;另一电机与镜头的对焦环合,当其受控转动时可完成镜头的对焦。但是由于增加了两个电机且镜片组数增多,镜头的体积也相应增大。

根据这个分类标准选择镜头时,我们可以按照是否固定光圈,对光圈控制的手动还是自动,是否需要自动变焦来确定。
2) 按镜头焦距分类,从小至大依次可以分为:标准镜头、广角镜头、鱼眼镜头、长焦距镜头、反射式望远镜头、微距镜头。

标准镜头,指焦距长度接近或等于底片/传感器对角线长度的镜头。其视角约50度,也是人单眼在头和眼不转动的情况下所能看到的视角。在诸如取景范围、透视关系等方面,标准镜头都与人眼观看的效果类同,显得特别亲切、自然。

广角镜头,指焦距短于、视角大于标准镜头的镜头。视角大于90度的镜头称为“超广角镜头”,适用于拍摄距离近且范围大的景物,又能刻意夸大前景表现强烈远近感即透视。其主要包括4个特点,即1)景深大,有利于获得被摄画面全部清晰的效果。广泛地用于风光片的拍摄;2)视角大,在有限的范围内可以获得较大的取景范围,在室内建筑的拍摄中尤为见长,广泛地用于房地产行业的拍摄;3)透视感强烈,可以营造具有强烈视觉冲击感的画面;4)畸变较大,尤其是在画面的边缘部分。

鱼眼镜头,一种极端的超广角镜头,视角在180度左右的镜头就可称为“鱼眼镜头”。鱼眼镜头的特点:1)视角大,被摄范围极广;2)透视感获得极大的夸张;3)鱼眼镜头存在严重的畸变,但可以获得戏剧性的效果;4)第一片镜片向外凸出,不能使用通常的滤镜,取而代之的是“内置式滤镜”。

长焦距镜头,适于拍摄距离远的景物,景深小容易使背景模糊主体突出,但体积笨重且对动态主体对焦不易。35mm 相机长焦距镜头通常分为三级,135mm以下称中焦距,135-500mm称长焦距,500mm 以上称超长焦距。长焦镜头的主要特点为:1)景深小,容易获得主体清晰,背景虚化的画面效果;2)视角小,能够获得远处主体较大的画面且不干扰被摄对象;3)压缩了画面透视的纵身感,拉近了前后景的距离;4)影像畸变较小。

3)按接口分类 镜头按接口分,可以划分为:C接口镜头、CS接口镜头、单板机镜头、特殊接口镜头。

2.2 镜头参数
1)焦距(focus):镜头焦距是指镜头光学后主点到焦点的距离,是镜头的重要性能指标。
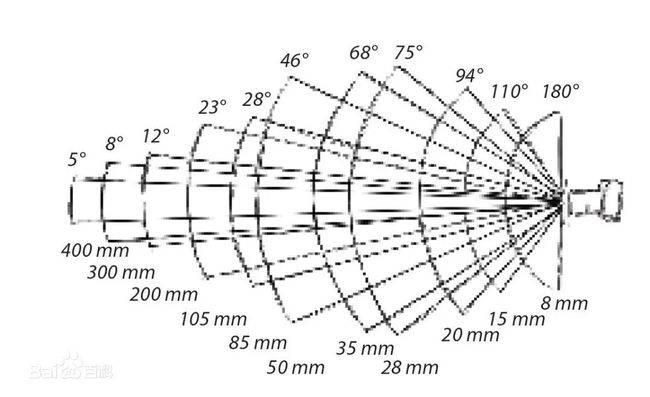
2)视场角(FOV):以相机的镜头为顶点,以拍摄目标的物像可通过镜头的最大范围的两条边缘构成的夹角,成为视场角。用我们通俗的理解来说,视场角的范围也即视野范围。
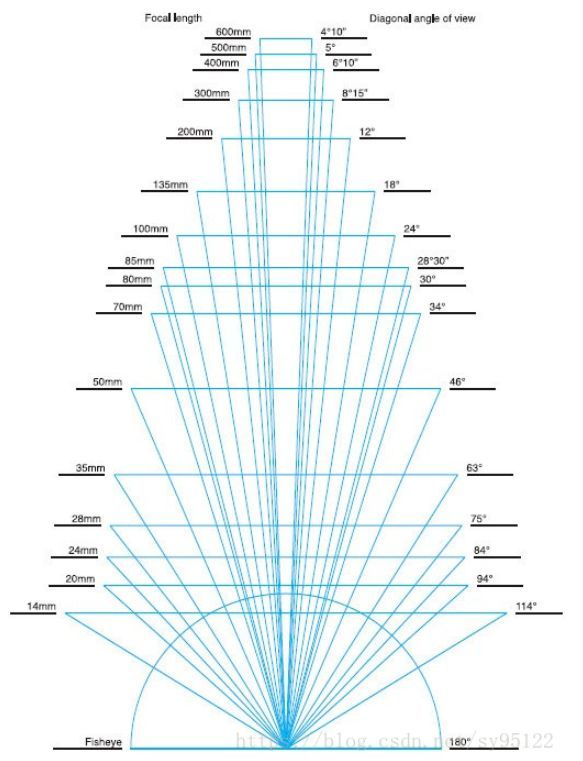
焦距与视场角成反比,即焦距越大,视场角越小。读者们可以试着从目视前方逐步变化成对眼来感受这个变化趋势>_<
视场角的定量计算公式如下:
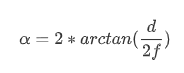
其中f为镜头焦距,d是我们根据目标范围自由选取的一段大小。
3) 光圈(Aperture)大小:光圈是一个用来控制光线透过镜头,进入机身内感光面的装置,它通常是在镜头内。常用光圈F值来表示光圈的大小。
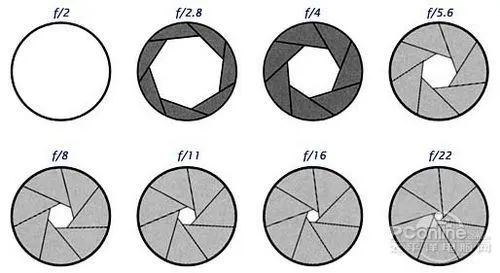
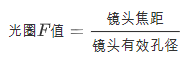
光圈F值越小,通光孔径越大,在同一单位时间内的进光量越多,画面越亮。
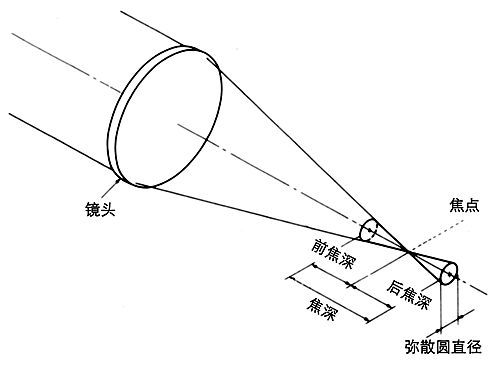
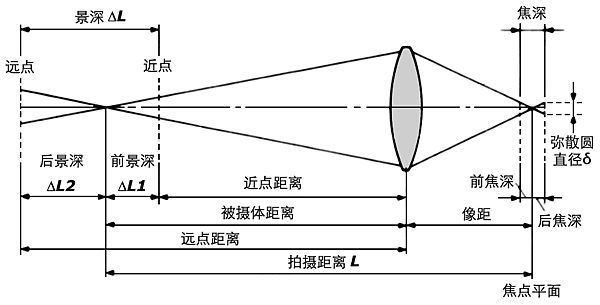
4)景深,焦深(depth of focus):景深是指在摄影机镜头或其他成像器前沿能够取得清晰图像的成像所测定的被摄物体前后距离范围。在聚焦完成后,在焦点前后的范围内都能形成清晰的像,这一前一后的距离范围,便叫做景深。焦深(depth of focus):在光学系统中所能允许的焦点偏移范围,当焦点偏移在此范围之内,所产生的模糊并不会影响到成像品质。焦深决定镜头的图像平面与传感器平面本身之间可容忍之翻转与倾斜量。
景深随镜头的焦距、光圈值F、拍摄距离而变化。对于固定焦距和拍摄距离,使用光圈越小,也就是镜片的直径越小,景深越大,和镜头的通光量无关。
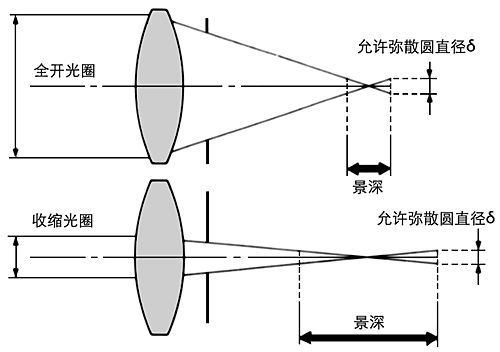
光圈越大(光圈值F越小)景深越小,光圈越小(光圈值F越大)景深越小;
镜头焦距越长,景深越浅;
拍摄距离越远,景深越大;
2.3 镜头选型
在了解了相机的不同分类以及各项参数后,我们可以总结出下面一个镜头的选型步骤:
获取物体至镜头的距离WD,如果是一个范围,取中间值;
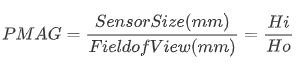
通过已知的传感器成像面高度Hi和被测物尺寸(视场高度)Ho计算图像放大倍数PMAG;
计算所需的镜头焦距f;
选取与上一步计算值最为接近的标准镜头焦距值,并固定此焦距为镜头焦距;
根据上一步所选的镜头焦距重新核算镜头到物体的距离WD
相信读完本文后,你应该对相机和镜头有了更进一步的理解,并且能够合理的选购一款相机进行后续的研究。下一期我们讲解一个单目相机测距的实例,敬请期待!
本文参考资料 :
http://www.360doc.com/content/18/0104/17/50354283_719051589.shtml https://zhuanlan.zhihu.com/p/29098395 https://blog.csdn.net/dcrmg/article/details/52851913
上期内容回顾:
机器视觉基础(一):相机成像原理
公众号精彩内容回顾:
十大经典排序算法的分析与实现
OpenAI Five简介——完胜Dota2人类顶尖玩家的AI
Leetcode杂谈之矩形问题系列