【Argoverse 1 Motion Forecasting Dataset】轨迹预测数据集简介
Argoverse 1 https://www.argoverse.org/av1.html#forecasting-link
https://www.argoverse.org/av1.html#forecasting-link
目录
1.数据集概述
1.1数据集简介
1.2数据收集方式
2. Argoverse 1 地图
2.1 Vector Map: Lane-Level Geometry
2.2 Rasterized Map: Drivable Area
2.3 Rasterized Map: Ground Height
3.Argoverse 1 Motion Forecasting Dataset
4. Download Argoverse 1 Dataset
4.1 Argoverse 1.1
1.数据集概述
1.1数据集简介
包含从1000多个驾驶小时中提取的324557条感兴趣的车辆轨迹。
Argoverse 1中的数据来自Argo AI自动驾驶测试车辆在迈阿密和匹兹堡运营的地区的一个子集,这两个美国城市都有不同的城市驾驶挑战和当地驾驶习惯。我们包括不同季节、天气条件和一天中不同时间的传感器数据或“日志段”的记录,以提供广泛的真实驾驶场景。
1.2数据收集方式
我们使用完全集成了Argo AI自动驾驶技术的福特Fusion Hybrid车队收集了所有数据。我们包括来自两个激光雷达传感器、七个环形摄像头和两个前置立体摄像头的数据。所有传感器均安装在车顶:

Lidar
- 2 roof-mounted lidar sensors
- Overlapping 40° vertical field of view
- Range of 200m
- On average, our lidar sensors produce a point cloud with ~ 107,000 points at 10 Hz
Localization
We use a city-specific coordinate system for vehicle localization. We include 6-DOF localization for each timestamp, from a combination of GPS-based and sensor-based localization methods.
Cameras
- Seven high-resolution ring cameras (1920 x 1200) recording at 30 Hz with a combined 360° field of view
- Two front-view facing stereo cameras (2056 x 2464) sampled at 5 Hz
Calibration
Sensor measurements for each driving session are stored in “logs.” For each log, we provide intrinsic and extrinsic calibration data for lidar and all nine cameras.
2. Argoverse 1 地图
地图包含丰富的几何和语义元数据,以更好地理解3D场景。从地面高度到下一个十字路口的剩余距离,地图使研究人员能够探索HD地图在机器人感知中的潜力。 有三个不同的组件使地图与众不同:
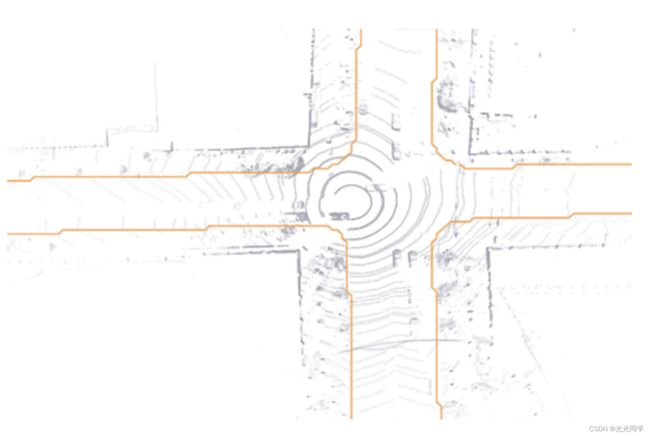
2.1 Vector Map: Lane-Level Geometry
语义向量图传达了有用的车道级细节,如车道中心线、交通方向和交叉点注释。通过这些功能和更多功能,用户可以探索测试区域内城市街道和复杂交叉路口的多种交通流方式,并获得每个场景前后的全面图片。
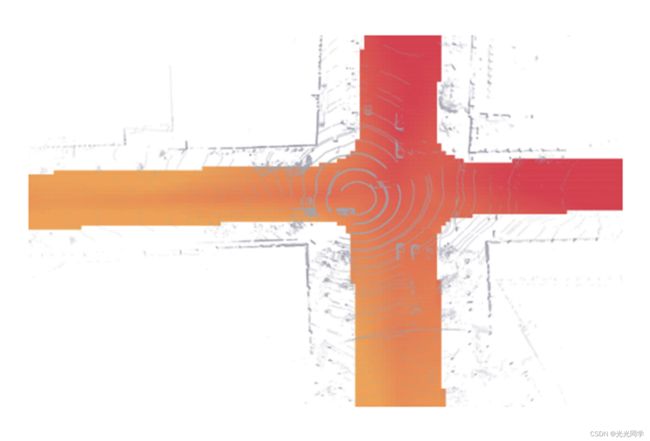
2.2 Rasterized Map: Drivable Area
地图包括一米网格分辨率的二进制可驱动区域标签。可驾驶区域是指车辆可以驾驶的区域(尽管不一定是合法的)。轨迹标注,在3D跟踪中概述,延伸到可驾驶区域之外五米。把这个更大的区域称为“感兴趣的区域”.
2.3 Rasterized Map: Ground Height
我们的地图包括一米分辨率的真实地面高度。使用我们的地图工具,用户可以去除不平坦地面上的激光雷达回波,以便更容易地检测物体。
3.Argoverse 1 Motion Forecasting Dataset
作用:训练和验证运动预测模型的数据集
Argorverse 1运动预测是324557个场景的精选集合,每个场景长5秒,用于训练和验证。每个场景都包含以10 Hz采样的每个跟踪对象的2D鸟瞰图质心。
为了创建此集合,我们从我们的自动驾驶测试车辆车队中筛选了1000多小时的驾驶数据,以找到最具挑战性的路段,包括显示十字路口车辆、左转或右转车辆以及变道车辆的路段。
这个数据集比目前从公开的自动驾驶数据集挖掘的数据集要大得多,我们的高清地图使预测物体的运动更加容易。
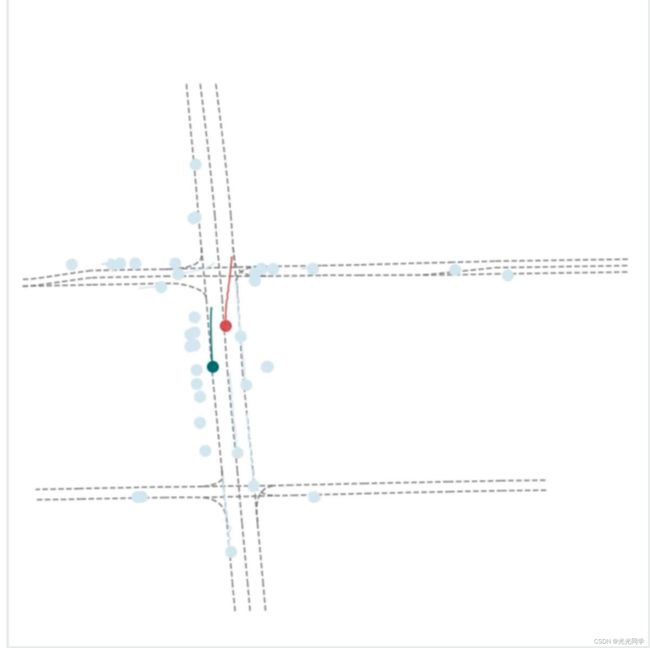
来自其中一个运动预测序列的静止帧,显示感兴趣的代理(红色)、自动驾驶车辆(绿色)和场景中所有其他感兴趣的对象(浅蓝色)的轨迹。
有关运动预测数据集的更多信息,请参阅我们的教程。 要下载,请向下滚动并选择运动预测数据集文件。
4. Download Argoverse 1 Dataset
Argoverse 1根据Creative Commons Attribution NonCommercial ShareAlike 4.0国际公共许可免费提供。Argorverse代码和API是根据MIT许可证提供的。下载前,请查看我们的完整使用条款。 对我们数据集的质量感到好奇吗?从每个日志中抽取一个日志。要开始,请访问我们的API并在下面的菜单中下载我们的地图。
4.1 Argoverse 1.1
2019年10月:我们修复了3D跟踪注释,改进了立体校准,并删除了一些嘈杂的预测场景。这个新版本的Argovese是Argovese比赛的基础。