【专题】uC/OS-II内核架构解析(1)---嵌入式RTOS
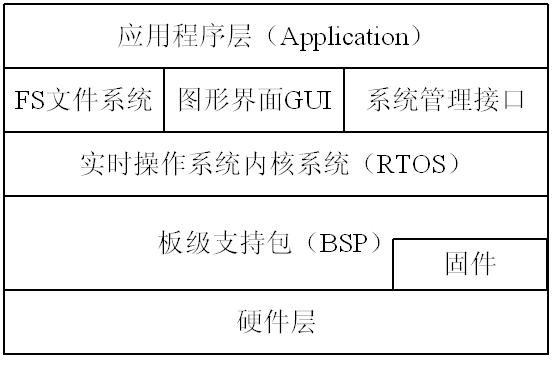
1. 嵌入式系统基本模型
2. RTOS设计原则
采用各种算法和策略,始终保持系统行为的可预测性。即在任何情况下,在系统运行的任何时刻,OS的资源配置策略都能为争夺资源(包括CPU、内存、网络带宽等)的多个实时任务合理地分配资源,使每个实时任务的实时性要求都能得到满足。
3. GPOS与RTOS
- GPOS:注重每次执行的平均响应时间,而不是某次特定执行的响应时间。
- RTOS:除满足应用功能需求外,还要满足实时性要求,始终保证系统行为的可预测性(predictability)。
与GPOS不同,RTOS注重的不是系统的平均表现,而是要满足每个实时任务在最坏情况下的实时性要求。也就是说,RTOS注重的是个体表现,更准确地说是个体最坏情况表现。
RTOS与GPOS的差别主要表现在:
a) 任务调度策略不同;
b) 内存管理方式不同;
c) 中断处理方式不同;
d) 系统管理方式不同;
4. 嵌入式开发模式
- 单片机系统的前后台程序:不使用OS,将应用程序设计成死循环,系统轮流处理各事件,对时间响应要求高的异步事件采用中断进行处理。
- 基于任务(进程)的软件设计方法:使用OS,由OS管理硬件资源,任务只是在需要资源时申请即可,至于when/which,完全由OS决定。
5.(不)可重入
(1) 可重入函数:指函数代码在运行过程中可以被中断,中断返回后仍能够恢复到原来的状态,并能准确无误执行的函数。
可重入函数可以被一个以上的任务调用,而不必担心数据被破坏。可重入函数或者只使用局部变量,即变量保存在CPU寄存器或堆栈中;或者使用全局变量,则要对全局变量予以保护。
(2) 不可重入函数:函数在运行过程中不可以被中断。
6. 互斥条件
实现任务间通信最简便的办法是使用共享数据,但要保证任务在处理共享数据时的排它性。使共享资源满足互斥条件,最一般的方法有:
(1) 关中断
使用某种实时内核,一般情况下关中断的时间最长不超过内核本身的关中断时间,这样就不会影响系统中断延迟。
(2) 使用测试并置位指令
Test&Set操作可能是微处理器一条不会被中断的指令,否则应该在程序中关中断做TAS操作再开中断。
(3) 禁止做任务切换
此时任务切换虽然是禁止的,但仍允许中断。如果这时中断来了,ISR会在这一临界区内立即执行。
(4) 利用信号量;
7. 临界状态
临界状态指当前程序处于不可中断状态。一般情况下,在调用不可重入函数前或在修改全局变量数据时,都需要先进入临界状态。进入临界状态的主要操作是关闭所有可以屏蔽的中断;而退出临界状态的主要操作是恢复到上次进入临界状态时前中断管理的状态。
在uC/OS-II中,宏OS_ENTER_CRITICAL()描述进入临界状态所完成的操作,宏OS_EXIT_CRITICAL()描述退出临界状态的操作。uC/OS-II提供了3种进入和退出临界状态的办法,可以根据CPU类型由宏OS_CRITICAL_MOTHOD指定具体的临界状态处理办法。