GNSS/INS组合导航学习-GINAV(一)
从今天开始整理一下,最近半年学习的组合导航算法
目前开源程序
1、严老师PSINS工具箱 (MATLAB——卡尔曼滤波算法)
2、GINAV (MATLAB——卡尔曼滤波算法 )
3、KF-GINS (C++——卡尔曼滤波算法)
当然也有图优化算法,后续有时间会继续整理的。参考书:严老师的捷联惯导与卡尔曼滤波原理、武汉大学牛老师组合导航算法讲义,分别对以上三个程序详细整理。
注意:采取的坐标系不同,捷联惯导程序也会有所不同。(东北天与北东地)
GINAV
分别有以下12个文件夹
今天主要整理ins文件夹

INS_1——askew.m
function matrix = askew(vector)
% convert 3x1 vector to 3x3 askew matrix.
matrix = [ 0, -vector(3), vector(2);
vector(3), 0, -vector(1);
-vector(2), vector(1), 0];
return 这个是最常见的反对称矩阵
知识点:反对称矩阵是正规矩阵、反对称的幂方通式、反对称的矩阵指数函数
matrix 3*3的矩阵 vector是 3*1的矩阵
INS_2——att2Cnb.m
function Cnb = att2Cnb(att)
sina=sin(att); cosa=cos(att);
sinp=sina(1); sinr=sina(2); siny=sina(3);
cosp=cosa(1); cosr=cosa(2); cosy=cosa(3);
Cnb=[ cosr*cosy-sinp*sinr*siny, -cosp*siny, sinr*cosy+sinp*cosr*siny;
cosr*siny+sinp*sinr*cosy, cosp*cosy, sinr*siny-sinp*cosr*cosy;
-cosp*sinr, sinp, cosp*cosr];
return将欧拉角转换为方向余弦

航向角y:运载体纵轴在当地水平面上的投影线与当地地理北向的夹角,常取北偏东为正角度范围为0~360°
俯仰角p:运载体纵轴与其水平投影线之间的夹角,当运载体抬头时角度定义为正,角度范围-90°~90°,
横滚角r:运载体立轴与纵轴所在铅垂面之间的夹角,当运载体向右倾斜时角度定义为正,角度范围-180°~180°
INS_3——Cnb2att.m
function att = Cnb2att(Cnb)
att=[asin(Cnb(3,2)); atan2(-Cnb(3,1),Cnb(3,3)); atan2(-Cnb(1,2),Cnb(2,2))];
return从方向余弦到欧拉角(此程序没有考虑奇异点、但是在严老师的PSINS中考虑了)

INS_4——earth_update.m
function eth=earth_update(pos,vel)
eth.Re = 6378137;
eth.f = 1/298.257223563;
eth.Rp = (1-eth.f)*eth.Re;
eth.e1 = sqrt(eth.Re^2-eth.Rp^2)/eth.Re;
eth.e2 = sqrt(eth.Re^2-eth.Rp^2)/eth.Rp;
eth.wie = 7.2921151467e-5;
eth.g0 = 9.7803267714; 以上是WGS84椭球参数
1、长半轴a = 6378137.0 m、短半轴b=6356752.3142m、扁率f =1/298.257223563;长半轴a = 6378137.0 m、短半轴b=6356752.3142m、扁率f =1/298.257223563、第─偏心率平方(e2)= 0.00669437999013、第二偏心率平方(e 2)= 0.00673949674222。
2、地球自转角速度= 7.292115×10-5 rad/s、椭球正常重力位= 62636860.8497 m2/s2、赤道正常重力=9.7803267714m/s2。
B = pos(1); L = pos(2); h = pos(3);
ve = vel(1); vn = vel(2); vu = vel(3);
eth.RN = eth.Re/sqrt(1-eth.e1^2*sin(B)^2);
eth.RM = eth.RN*(1-eth.e1^2)/(1-eth.e1^2*sin(B)^2);
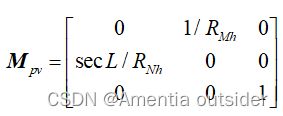
eth.Mpv2 = sec(B)/(eth.RN+h);
eth.Mpv4 = 1/(eth.RM+h);
eth.RNh = eth.RN+h;
eth.RMh = eth.RM+h;
eth.tanL = tan(B);
eth.secL = sec(B);
eth.sinL = sin(B);
eth.cosL = cos(B);
eth.sin2L= sin(2*B);
eth.cos2L= cos(2*B);1、B、L、H代表地理坐标的纬度、经度和大地高
2、ve 东向速度、vn北向速度、vu天向速度
3、ethRN、ethRM代表子午圈曲率半径和卵酉圏曲率半径
% earth rotation rate projected in the n-frame
eth.wnie = [0; eth.wie*cos(B); eth.wie*sin(B)];
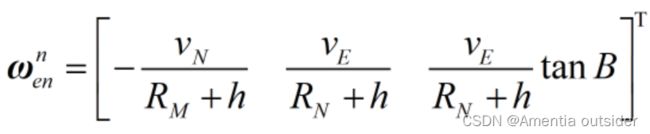
% the rate of n-frame respect to e-fame projected in the n-frame
eth.wnen = [-vn/(eth.RM+h); ve/(eth.RN+h); ve/(eth.RN+h)*tan(B)];
% the rate of n-frame respect to i-fame projected in the n-frame
eth.wnin = eth.wnie + eth.wnen;
% earth gravity vector projected in the n-frame
eth.g = eth.g0*(1+5.27094e-3*sin(B)^2+2.32718e-5*sin(B)^4)-3.086e-6*h;
eth.gn = [0; 0; -eth.g];
% gcc:gravitational acceleration/coriolis acceleration/centripetal acceleration
eth.wnien = 2*eth.wnie + eth.wnen;
eth.gcc = -cross(eth.wnien,vel)+eth.gn;
return1、e系相对于i系的旋转角速度在n系下的投影

2、n系相对于e系的旋转角速度在n系下的投影
3、n系相对于i系的旋转角速度在n系下的投影

4、在n系下计算重力(重力模型方法有很多只是ginav中是这一种方法)

5、哥氏加速度有害加速度

只有在加速度计输出中扣除有害加速度后,才能获得运载体在导航系下的几何运动加速度
INS_5——rvecmat.m
function mat=rvec2mat(vec)
% convert rotation vector to transformation matrix
theta=sqrt(vec'*vec);
mat=eye(3)+(sin(theta)/theta*askew(vec))+...
((1-cos(theta))/theta^2*(askew(vec))^2);
return旋转矢量转方向余弦

theat为等效旋转矢量其矢量方向表示为转轴方向,而模的大小表示为旋转角度大小
INS_6——update_trans_mat.m
更新状态转移矩阵
function Phi=update_trans_mat(ins)
zero33 = zeros(3);
tanL = ins.eth.tanL; secL = ins.eth.secL;
sin2L= ins.eth.sin2L; cos2L= ins.eth.cos2L;
RNh = ins.eth.RNh; RMh = ins.eth.RMh;
vE = ins.vel(1); vN = ins.vel(2); vU = ins.vel(3); %#ok
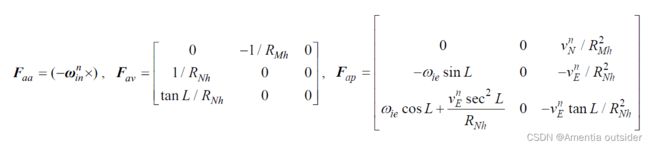
F1=zero33; F1(2)=-ins.eth.wnie(3); F1(3)=ins.eth.wnie(2);
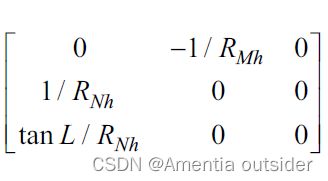
F2=zero33; F2(2)=1/RNh; F2(3)=tanL/RNh; F2(4)=-1/RMh;
F3=zero33; F3(3)=vE*secL^2/RNh; F3(7)=vN/RMh^2; F3(8)=-vE/RNh^2; F3(9)=-vE*tanL/RNh^2;
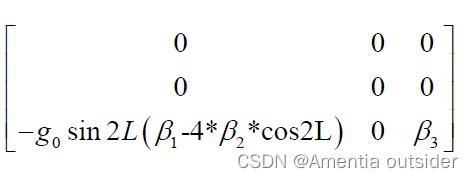
x = -ins.eth.g0*sin2L*(5.27094e-3-4*2.32718e-5*cos2L);
F4=zero33; F4(3)=x; F4(9)=3.086e-6;
1、先生成3*3的0矩阵,共有四个0矩阵F1、F2、F3,F4往里面赋值
2、F1与e系相对于i系的旋转角速度在n系下的投影有关
3、F2与子午圈曲率半径和卵酉圏曲率半径有关
4、F3与东向速度北向速度、子午圈曲率半径、卵酉圏曲率半径有关

5、F4与g、相关
% transition matrix for phi
Faa = -askew(ins.eth.wnin);
Fav = F2;
Fap = F1+F3;
% transition matrix for delta-vel
Fva = askew(ins.fn);
Fvv = askew(ins.vel)*F2 - askew(ins.eth.wnien);
Fvp = askew(ins.vel)*(2*F1+F3+F4);

% transition matrix for delta-pos
Fpp = zero33; Fpp(2)=vE*secL*tanL/RNh; Fpp(7)=-vN/RMh^2; Fpp(8)= -vE*secL/RNh^2;
Fpv = ins.Mpv; 
% time continuous state transition matrix
Ft = [ Faa Fav Fap -ins.Cnb zero33
Fva Fvv Fvp zero33 ins.Cnb
zero33 Fpv Fpp zero33 zero33
zero33 zero33 zero33 diag(-1./ins.tauG) zero33
zero33 zero33 zero33 zero33 diag(-1./ins.tauA)]; 

% discretization
if ins.nt>0.1
Phi = expm(Ft*ins.nt);
else
Phi = eye(size(Ft))+Ft*ins.nt;
end
return当ins.nt大于0,1时,Phi以(Ft*ins,nt)求矩阵的以e为底数的指数函数,否则就是单位阵加上Ft*int,nt


INS_7——ins_init.m
function ins=ins_init(opt,avp0)
% sample date
ins.nt = 1/opt.sample_rate;
ins.old_imud = zeros(1,6);惯导初始化——采样时间
ins.old_imud一行六列的零矩阵

% initialize position,attitude and velocity
ins.att = avp0(1:3);
ins.vel = avp0(4:6);
ins.pos = avp0(7:9);
ins.acc = zeros(3,1);
ins.Cnb = att2Cnb(ins.att);惯导初始化——位置、姿态和速度
% initialize imu error
ins.bg = zeros(3,1);
ins.ba = zeros(3,1);
ins.Kg = eye(3);
ins.Ka = eye(3);
ins.tauG = [inf;inf;inf];
ins.tauA = [inf;inf;inf];
% initialize earth related parameters
ins.eth = earth_update(ins.pos,ins.vel);
ins.Mpv = [0, ins.eth.Mpv4, 0; ins.eth.Mpv2, 0, 0; 0, 0, 1];
ins.wib = zeros(3,1);
ins.fb = zeros(3,1);
ins.fn = -ins.eth.gn;
ins.web = zeros(3,1);初始化imu误差
% initialize earth related parameters
ins.eth = earth_update(ins.pos,ins.vel);
ins.Mpv = [0, ins.eth.Mpv4, 0; ins.eth.Mpv2, 0, 0; 0, 0, 1];
ins.wib = zeros(3,1);
ins.fb = zeros(3,1);
ins.fn = -ins.eth.gn;
ins.web = zeros(3,1);初始化地球相关系数
% initialize state, state covariance matrix, system noise matrix
% state transition matrix, lever arm
init_att_unc = opt.init_att_unc;
init_vel_unc = opt.init_vel_unc;
init_pos_unc = opt.init_pos_unc;
init_bg_unc = repmat(opt.init_bg_unc,1,3);
init_ba_unc = repmat(opt.init_ba_unc,1,3);
psd_gyro = repmat(opt.psd_gyro,1,3);
psd_acce = repmat(opt.psd_acce,1,3);
psd_bg = repmat(opt.psd_bg,1,3);
psd_ba = repmat(opt.psd_ba,1,3);
ins.x = [ins.att;ins.vel;ins.pos;ins.bg;ins.ba];
ins.P = diag([init_att_unc,init_vel_unc,init_pos_unc,init_bg_unc,init_ba_unc].^2);
ins.Q = diag([psd_gyro, psd_acce, zeros(1,3), psd_bg, psd_ba])*ins.nt;
ins.Phi= update_trans_mat(ins);
ins.lever = opt.lever';
ins.xa = zeros(15,1);
ins.Pa = zeros(15,15);
return初始化状态、状态协方差矩阵、系统噪声矩阵、状态转换矩阵,杠杆误差
ins_8——ins_mech.m
function ins=ins_mech(ins,imu)
% INS mechanization
persistent old_dw old_dv
ins.time=imu.time;
if isempty(old_dw)
old_dw=zeros(3,1);
end
if isempty(old_dv)
old_dv=zeros(3,1);
end1、定义持久变量old_dw、old_dv
2、判断old_dw、old_dv是否为空
% correct bias and scaling factor errors
dw0 = imu.dw';
dv0 = imu.dv';
dw = ins.Kg*dw0-ins.bg*ins.nt;
dv = ins.Ka*dv0-ins.ba*ins.nt;纠正零偏和比例因子误差
% extrapolate velocity and position
vel_mid = ins.vel+ins.acc*(ins.nt/2);
pos_mid = ins.pos+ins.Mpv*(ins.vel+vel_mid)/2*ins.nt;
% update velocity
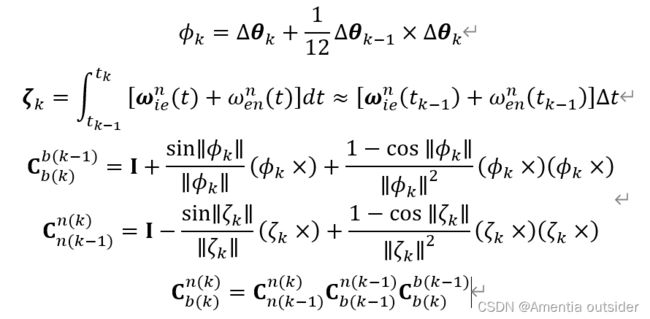
dv_rot = 0.5*cross(dw0,dv0);
dv_scul = 1/12*(cross(old_dw,dv0)+cross(old_dv,dw0));
dv_sf = (eye(3)-0.5*ins.nt*askew(ins.eth.wnin))*ins.Cnb*dv + ins.Cnb*(dv_rot+dv_scul);
dv_cor = ins.eth.gcc*ins.nt;
vel_new = ins.vel+dv_sf+dv_cor;速度更新
这里采用的是双子样算法。但是与严老师的捷联惯导书中公式不同,这部分公式与牛老师的捷联惯导讲义对应,可以参考武大组合导航课程,牛老师详细介绍了其中的差别。

下面公式是严老师书中公式 
% update position
ins.Mpv(2) = ins.eth.Mpv2;
ins.Mpv(4) = ins.eth.Mpv4;
pos_new = ins.pos + ins.Mpv*(ins.vel+vel_new)/2*ins.nt; 位置更新

% update attitude
dw_cone = 1/12*cross(old_dw,dw0);
phi_b_ib = dw+dw_cone;
phi_n_in = ins.eth.wnin*ins.nt;
Cbb = rvec2mat(phi_b_ib);
Cnn = rvec2mat(phi_n_in)';
Cnb_new = Cnn*ins.Cnb*Cbb;
att_new = Cnb2att(Cnb_new);
姿态更新
% update INS result
ins.Cnb = Cnb_new;
ins.att = att_new;
ins.vel = vel_new;
ins.pos = pos_new;
ins.x = [ins.att;ins.vel;ins.pos;ins.bg;ins.ba];
old_dw=dw0;
old_dv=dv0;
return更新INS结果
INS_9——ins_time_update.m
function ins=ins_time_updata(ins)
% INS time update
ins.Phi=update_trans_mat(ins);
G=zeros(15,15);
G(1:3,1:3)=-ins.Cnb;
G(4:6,4:6)=ins.Cnb;
G(10:12,10:12)=eye(3);
G(13:15,13:15)=eye(3);
Q0=G*ins.Q*G';
P0=ins.P+0.5*Q0;
ins.P=ins.Phi*P0*ins.Phi'+0.5*Q0;
return惯导时间更新
在一个滤波周期内,卡尔曼滤波的信息更新过程可以分为时间更新过程和量测更新过程。其中时间更新又被称为预测,一步预测的状态及其协方差阵为:
