地面滤波算法学习及测试记录
1.CSF布料滤波算法
1.1 环境配置:
环境:Win10+ VS2019
参考文章:使用CSF对kitti的点云数据过滤出地面点云,结合PCL使用,C++实现
下载代码后,新建build文件夹

打开CMake-gui

点击Configure, 出现红色的设置提醒,好像没啥好设置的,再点击Configure,Generate
按照该博主的步骤,打开CSF.sln,右键ALL_BUILD,点击生成。
出现报错:2>cl : 命令行 error D8021: 无效的数值参数“/Werror”
命令行 error D8021: 无效的数值参数“/Wextra”
百度有博主说是python文件夹下的setup.py文件里面有设置了这个参数,但查找该代码下的内容,并未找到。
按照错误提示找到D:\Program Files (x86)\CSF\CSF-master\src\CMakeLists.txt,
删除target_compile_options里面的内容,只剩下(CSF PRIVATE -Wall ),保存。
重新打开CSF.sln,右键ALL_BUILD,点击生成。
虽然有很多报错,但是显示生成成功。并生成了lib文件。
1.2 代码运行
按照参考文章的步骤配置环境,博主给的代码如下:
#include 用点云库PCL从入门到精通\第十二章\9Identifying ground returns using Progressive Morphological Filter segmentation\Source\samp11-utm.pcd 测试一下
源点云:

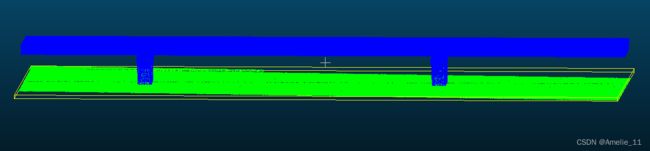
分割后:蓝色为地面点云
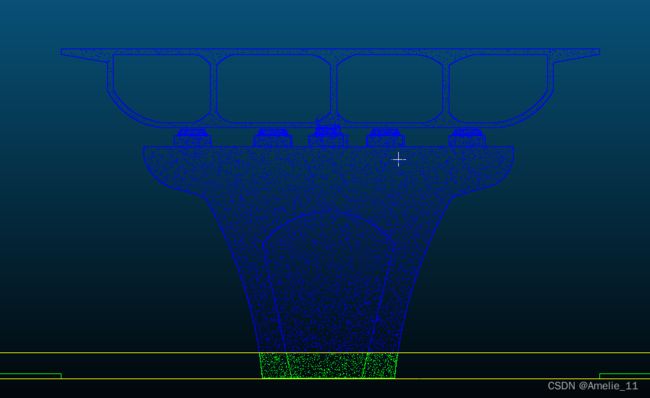
分割自己的数据:桥墩部分,有一些被分成地面了
2. 索引滤波器过滤地面
参考链接:PCL滤波—使用索引滤波器过滤地面
作者给出的代码
//索引滤波
#include ("table_scene_lms400_downsampled.pcd", *cloud_filtered, false);
pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients());
pcl::PointIndices::Ptr inliers(new pcl::PointIndices());
pcl::SACSegmentation<pcl::PointXYZ> seg; //创建分割对象
//可选
seg.setOptimizeCoefficients(true); //设置对估计的模型参数进行优化处理
//必选
seg.setModelType(pcl::SACMODEL_PLANE); //设置分割模型类别
seg.setMethodType(pcl::SAC_RANSAC); //设置用哪个随机参数估计方法
seg.setMaxIterations(100); //设置最大迭代次数
seg.setDistanceThreshold(0.15); //设置判断是否为模型内点的距离阈值
// 创建滤波器对象
pcl::ExtractIndices<pcl::PointXYZ> extract;
int i = 0, nr_points = (int)cloud_filtered->points.size();
//为了处理点云中包含多个模型,在一个循环中执行该过程,
//并在每次模型被提取后,我们保存剩余的点,进行迭代;
//模型内点通过分割过程获取;
//当还有60%原始点云数据时退出循环
while (cloud_filtered->points.size() > 0.6 * nr_points)
{
// 从余下的点云中分割最大平面组成部分
seg.setInputCloud(cloud_filtered);
seg.segment(*inliers, *coefficients);
if (inliers->indices.size() == 0)
{
std::cerr << "Could not estimate a planar model for the given dataset." << std::endl;
break;
}
// 分离内层
extract.setInputCloud(cloud_filtered);
extract.setIndices(inliers);
extract.setNegative(false);
extract.filter(*cloud_p);
std::cerr << "PointCloud representing the planar component: " << cloud_p->width * cloud_p->height << " data points." << std::endl;
std::stringstream ss;
ss << "C:\\Users\\oh_clm\\Desktop\\桥梁\\桥梁点云文件\\7\\table_scene_lms400_plane_" << i << ".pcd";
// writer.write(ss.str(), *cloud_p, false);
// 创建滤波器对象
extract.setNegative(true);
extract.filter(*cloud_f);
cloud_filtered.swap(cloud_f);
i++;
}
cout << "迭代次数:" << i << endl;
pcl::visualization::CloudViewer viewer("Cloud Viewer"); //创建viewer对象
viewer.showCloud(cloud_f);
// viewer.runOnVisualizationThreadOnce(viewerOneOff);
while (!viewer.wasStopped())
{
//在此处可以添加其他处理
}
return (0);
}
这个代码并不适用于目标带有平面的物体

3.渐进式形态学滤波
参考文章:PCL 渐进式形态学滤波
#include 可能是数据太大,没有成功。