深度学习评价指标总结及代码实现
1.分类任务
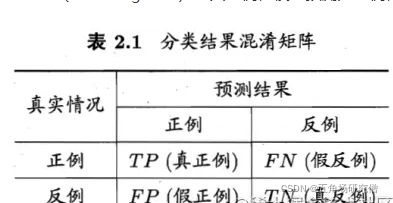
混淆矩阵
混淆矩阵就是统计分类模型的分类结果,即:统计归对类,归错类的样本的个数,然后把结果放在一个表里展示出来,这个表就是混淆矩阵。
初步理解混淆矩阵,当以二分类混淆矩阵作为入门,多分类混淆矩阵都是以二分类为基础作为延伸的!
对于二分类问题,将类别1称为正例(Positive),类别2称为反例(Negative),分类器预测正确记作真(True),预测错误记作(False),由这4个基本术语相互组合,构成混淆矩阵的4个基础元素,为:
TP(True Positive):真正例,模型预测为正例,实际是正例(模型预测为类别1,实际是类别1)
FP(False Positive):假正例,模型预测为正例,实际是反例 (模型预测为类别1,实际是类别2)
FN(False Negative):假反例,模型预测为反例,实际是正例 (模型预测为类别2,实际是类别1)
TN(True Negative):真反例,模型预测为反例,实际是反例 (模型预测为类别2,实际是类别2)
评价指标
import numpy as np
from sklearn.metrics import confusion_matrix, accuracy_score, precision_score, recall_score, f1_score, multilabel_confusion_matrix
np.seterr(divide='ignore',invalid='ignore')
"""
ConfusionMetric
Mertric P N
P TP FN
N FP TN
"""
class ClassifyMetric(object):
def __init__(self, numClass, labels=None):
self.labels = labels
self.numClass = numClass
self.confusionMatrix = np.zeros((self.numClass,)*2)
def genConfusionMatrix(self, y_true, y_pred):
return confusion_matrix(y_true, y_pred, labels=self.labels)
def addBatch(self, y_true, y_pred):
assert np.array(y_true).shape == np.array(y_pred).shape
self.confusionMatrix += self.genConfusionMatrix(y_true, y_pred)
def reset(self):
self.confusionMatrix = np.zeros((self.numClass, self.numClass))
def accuracy(self):
accuracy = np.diag(self.confusionMatrix).sum() / self.confusionMatrix.sum()
return accuracy
def precision(self):
precision = np.diag(self.confusionMatrix) / self.confusionMatrix.sum(axis=0)
return np.nan_to_num(precision)
def recall(self):
recall = np.diag(self.confusionMatrix) / self.confusionMatrix.sum(axis=1)
return recall
def f1_score(self):
precision = self.precision()
recall = self.recall()
f1_score = 2 * (precision*recall) / (precision+recall)
return np.nan_to_num(f1_score)
if __name__ == '__main__':
y_true = ["cat", "ant", "cat", "cat", "ant", "bird"]
y_pred = ["ant", "ant", "cat", "cat", "ant", "cat"]
metric = ClassifyMetric(3, ["ant", "bird", "cat"])
metric.addBatch(y_true, y_pred)
acc = metric.accuracy()
precision = metric.precision()
recall = metric.recall()
f1Score = metric.f1_score()
print('acc is : %f' % acc)
print('precision is :', precision)
print('recall is :', recall)
print('f1_score is :', f1Score)
print('\n')
# 与 sklearn 对比
metric = confusion_matrix(y_true, y_pred, labels=["ant", "bird", "cat"])
accuracy_score1 = accuracy_score(y_true, y_pred)
print("accuracy_score", accuracy_score1)
precision_score1 = precision_score(y_true, y_pred, average=None, zero_division=0)
print("precision_score", precision_score1)
recall_score1 = recall_score(y_true, y_pred, average=None, zero_division=0)
print("recall_score", recall_score1)
f1_score1 = f1_score(y_true, y_pred, average=None)
print("f1_score", f1_score1)
2.语义分割
语义分割是像素级别的分类,其常用评价指标:
像素准确率(Pixel Accuracy,PA)、
类别像素准确率(Class Pixel Accuray,CPA)、
类别平均像素准确率(Mean Pixel Accuracy,MPA)、
交并比(Intersection over Union,IoU)、
平均交并比(Mean Intersection over Union,MIoU),
频率加权交并比(frequency Weighted Intersection over Union,FWIoU)
其计算都是建立在混淆矩阵(Confusion Matrix)的基础上。因此,了解基本的混淆矩阵知识对理解上述6个常用评价指标是很有益处的!
混淆矩阵
语义分割中的混淆矩阵,其关注的重点不在类别,而在像素点,判断一个像素点是否预测正确。
语义分割混淆矩阵的计算公式:
def generate_matrix(label_true, label_pred, n_class):
mask = (label_true >= 0) & (label_true < n_class)
label = n_class * label_true[mask] + label_pred[mask]
confusionMatrix = np.bincount(label, minlength=n_class**2).reshape(n_class, n_class)
return confusionMatrix
对代码进行详细解析:
label_true = np.array([
[0,1,1],
[2,1,0],
[2,2,1]])
label_pred = np.array([
[0,2,0],
[2,1,0],
[1,2,1]])
n = 3
mask = (label_true >= 0) & (label_true < n)
print(mask, '\n')
"""
这一句是为了保证标记的正确性(标记的每个元素值在[0, n_class)内),标记正确得到的mask是一个全为true的数组
[[ True True True]
[ True True True]
[ True True True]]
"""
a = label_true[mask].astype(int)
print(a, '\n')
# 将label_true展平 [0 1 1 2 1 0 2 2 1]
b = label_pred[mask]
print(b, '\n')
# 将label_pred展平 [0 2 0 2 1 0 1 2 1]
c = n * a + b
print(c, '\n')
# [0 5 3 8 4 0 7 8 4]
d = np.bincount(c, minlength=n**2)
print(d, '\n')
# [2 0 0 1 2 1 0 1 2]
"""
- minlength=n_class ** 2 参数是为了保证输出向量的长度为n_class * n_class。
- 根据np.bincout的特性,c中元素的每一个值是为d中以其值为index的元素+1,
也就是说c中元素的值其实是对应与d的index,d里面的元素,就是c中元素出现的次数,
比如d[4],这个4表示的就是c中的元素4,d[4] = 2,表示在c中4出现了两次,
而c中的4是怎么得来的呢?是 a*n + b 得来的
"""
D = d.reshape(n,n)
print(D, '\n')
"""
通过reshape(n, n)将向量d转换为3*3的矩阵,其结果如下表:
[2 0 0]
[1 2 1]
[0 1 2]
则D[i,j]的值就是原来的d[i*n+j]的值,D[i,j]的值表示i*n+j在c中出现的次数,c = a*n + b,
所以就可以看出来,i 对应的就是 a,j 对应的就是 b,且它们在a与b相同的位置处,恰好代表了真实类别与预测类别,
即D[i,j]代表了预测结果为类别 j,实际标签为类别 i 的所有像素点的数目。
D[1,1]=d[1*3+1]=d[4]=2,表示预测类别为1,实际标签也为1的所有像素点数目为2。
"""
评价指标
import numpy as np
import itertools
import matplotlib.pyplot as plt
from sklearn.metrics import confusion_matrix
"""
ConfusionMetric
Mertric P N
P TP FN
N FP TN
"""
class SegmentationMetric(object):
def __init__(self, numClass):
self.numClass = numClass
self.confusionMatrix = np.zeros((self.numClass,)*2)
def genConfusionMatrix(self, imgLabel, imgPredict):
mask = (imgLabel >= 0) & (imgLabel < self.numClass)
label = self.numClass * imgLabel[mask] + imgPredict[mask]
count = np.bincount(label, minlength=self.numClass**2)
confusionMatrix = count.reshape(self.numClass, self.numClass)
return confusionMatrix
def addBatch(self, imgLabel, imgPredict):
assert imgLabel.shape == imgPredict.shape
self.confusionMatrix += self.genConfusionMatrix(imgLabel, imgPredict)
def reset(self):
self.confusionMatrix = np.zeros((self.numClass, self.numClass))
def plot_confusion_matrix(self, classes, normalize=False, title='Confusion matrix', cmap=plt.cm.Blues):
cm = self.confusionMatrix
if normalize:
cm = cm.astype('float') / cm.sum(axis=1)[:, np.newaxis]
print("Normalized confusion matrix")
else:
print('Confusion matrix, without normalization')
plt.imshow(cm, interpolation='nearest', cmap=cmap)
plt.title(title)
plt.colorbar()
tick_marks = np.arange(len(classes))
plt.xticks(tick_marks, classes, rotation=45)
plt.yticks(tick_marks, classes)
thresh = cm.max() / 2.
for i, j in itertools.product(range(cm.shape[0]), range(cm.shape[1])):
num = '{:.2f}'.format(cm[i, j]) if normalize else int(cm[i, j])
plt.text(j, i, num,
verticalalignment='center',
horizontalalignment="center",
color="white" if num > thresh else "black")
plt.tight_layout()
plt.ylabel('True label')
plt.xlabel('Predicted label')
plt.show()
# 评价指标
def pixelAccuracy(self):
# return all class overall pixel accuracy
# PA = acc = (TP + TN) / (TP + TN + FP + TN)
acc = np.diag(self.confusionMatrix).sum() / self.confusionMatrix.sum()
return acc
def classPixelAccuracy(self):
# return each category pixel accuracy(A more accurate way to call it precision)
# acc = (TP) / TP + FP
classAcc = np.diag(self.confusionMatrix) / self.confusionMatrix.sum(axis=0)
return classAcc # 返回的是一个列表值,如:[0.90, 0.80, 0.96],表示类别1 2 3各类别的预测准确率
def meanPixelAccuracy(self):
classAcc = self.classPixelAccuracy()
meanAcc = np.nanmean(classAcc) # np.nanmean 求平均值,nan表示遇到Nan类型,其值取为0
return meanAcc # 返回单个值,如:np.nanmean([0.90, 0.80, 0.96, nan, nan]) = (0.90 + 0.80 + 0.96)/ 3 = 0.89
def intersectionOverUnion(self):
# Intersection = TP Union = TP + FP + FN
# IoU = TP / (TP + FP + FN)
intersection = np.diag(self.confusionMatrix) # 取对角元素的值,返回列表
union = np.sum(self.confusionMatrix, axis=1) + np.sum(self.confusionMatrix, axis=0) - np.diag(self.confusionMatrix) # axis = 1表示混淆矩阵行的值,返回列表; axis = 0表示取混淆矩阵列的值,返回列表
IoU = intersection / union # 返回列表,其值为各个类别的IoU
return IoU
def meanIntersectionOverUnion(self):
IoU = self.intersectionOverUnion()
mIoU = np.nanmean(IoU) # 求各类别IoU的平均
return mIoU
def frequencyWeightedIntersectionOverUnion(self):
# FWIOU = [(TP+FN)/(TP+FP+TN+FN)]*[TP/(TP+FP+FN)]
freq = np.sum(self.confusionMatrix, axis=1) / np.sum(self.confusionMatrix)
iu = self.intersectionOverUnion()
FWIoU = (freq[freq > 0] * iu[freq > 0]).sum()
return FWIoU
if __name__ == '__main__':
label_true = np.array([0, 1, 1, 2, 1, 0, 2, 2, 1]) # 可直接换成标注图片
label_pred = np.array([0, 2, 0, 2, 1, 0, 1, 2, 1]) # 可直接换成预测图片
metric = SegmentationMetric(3) # 3表示有3个分类,有几个分类就填几
metric.addBatch(label_true, label_pred)
print(metric.confusionMatrix)
pa = metric.pixelAccuracy()
cpa = metric.classPixelAccuracy()
mpa = metric.meanPixelAccuracy()
IoU = metric.intersectionOverUnion()
mIoU = metric.meanIntersectionOverUnion()
FWIoU = metric.frequencyWeightedIntersectionOverUnion()
print('pa is : %f' % pa)
print('cpa is :', cpa)
print('mpa is : %f' % mpa)
print('IoU is :', IoU)
print('mIoU is : %f' % mIoU)
print('FWIoU is : %f' % FWIoU)
# metric.plot_confusion_matrix(classes=['background', 'cat', 'dog'])
# 对比sklearn
metric = confusion_matrix(label_true, label_pred)
print(metric)
3.ROC曲线与AUC指标
以上的准确率Accuracy,精确度Precision,召回率Recall,F1 score,混淆矩阵都只是一个单一的数值指标,如果想观察分类算法在不同的参数下的表现情况,就可以使用一条曲线,即ROC曲线,全称为receiver operating characteristic。
ROC曲线可以用于评价一个分类器在不同阈值下的表现情况。在ROC曲线中,每个点的横坐标是false positive rate(FPR),纵坐标是true positive rate(TPR),描绘了分类器在True Positive和False Positive间的平衡,两个指标的计算如下:
TPR=TP/(TP+FN),代表分类器预测的正类中实际正实例占所有正实例的比例。
FPR=FP/(FP+TN),代表分类器预测的正类中实际负实例占所有负实例的比例,FPR越大,预测正类中实际负类越多。
ROC曲线通常如下:
其中有4个关键的点:
点(0,0):FPR=TPR=0,分类器预测所有的样本都为负样本;
点(1,1):FPR=TPR=1,分类器预测所有的样本都为正样本;
点(0,1):FPR=0, TPR=1,此时FN=0且FP=0,所有的样本都正确分类;
点(1,0):FPR=1,TPR=0,此时TP=0且TN=0,最差分类器,避开了所有正确答案。
ROC曲线相对于PR曲线有个很好的特性:
当测试集中的正负样本的分布变化的时候,ROC曲线能够保持不变,即对正负样本不均衡问题不敏感。比如负样本的数量增加到原来的10倍,TPR不受影响,FPR的各项也是成比例的增加,并不会有太大的变化。所以不均衡样本问题通常选用ROC作为评价标准。
ROC曲线越接近左上角,该分类器的性能越好,若一个分类器的ROC曲线完全包住另一个分类器,那么可以判断前者的性能更好。
如果想通过两条ROC曲线来定量评估两个分类器的性能,就可以使用AUC指标。
AUC(Area Under Curve**)为ROC曲线下的面积**,它表示的就是一个概率,这个面积的数值不会大于1。随机挑选一个正样本以及一个负样本,AUC表征的就是有多大的概率,分类器会对正样本给出的预测值高于负样本,当然前提是正样本的预测值的确应该高于负样本。
predict = [0.9,0.8,0.7,0.6,0.55,0.54,0.53,0.52,0.51,0.505,0.4,0.39,0.38,0.37,0.36,0.35,0.34,0.33,0.3,0.1];
ground_truth = [1,1,0,1,1,1,0,0,1,0,1,0,1,0,0,0,1,0,1,0];
auc = plot_roc(predict,ground_truth)
function auc = plot_roc(predict,ground_truth)
pos_num = sum(ground_truth==1);
neg_num = sum(ground_truth==0);
m = size(ground_truth,2);
[pre,Index] = sort(predict);
ground_truth = ground_truth(Index);
x = zeros(m+1,1);
y = zeros(m+1,1);
auc = 0;
x(1) = 1; y(1) = 1; %当阈值为0.1时,都被分类为了正类,所以真阳率和假阳率都为1.
for i = 2:m
TP = sum(ground_truth(i:m) == 1); %大于x(i)的标签为1的都是真阳,大于x(i)的标签为0的都是假阳
FP = sum(ground_truth(i:m) == 0);
x(i) = FP/neg_num;
y(i) = TP/pos_num;
auc = auc + (y(i)+y(i-1))*(x(i-1)-x(i))/2;
end
x(m+1) = 0; y(m+1) = 0;
auc = auc + y(m)*x(m)/2;%这句多余
plot(x,y);
end