【哈工大大一年度项目经验与感想】立项篇 中(2021.9.17~2021.11.17)
第四步:立项报告书写
立项报告的目的在于向答辩老师或者投资方阐述你的项目是什么?做什么的?解决什么问题?打算怎么解决这些问题?有什么创新点、特色?目标?所以一篇立项报告正文需要包括以下内容:
1. 立项背景
2. 研究内容
3. 预期目标
4. 特色与创新
5. 研究方案
6. 进度安排
7. 经费预算
8. 参考文献
这几部分都有一些需要注意的地方,接下来我一一阐述:
4.1 立项背景(3~5页)
4.1.1 立项背景需要包括国内背景、国外背景总共大概3~5页
这块主要是在知网或者万方等网站找相关论文,然后看他们的项目背景,提取与你们项目相关的内容,一般是介绍别人做到什么程度了,现在都有什么技术,他们的不足是什么,然后引出你们自己的项目
4.1.2 图文并茂,文章中一篇里只有文字没有图片是大忌,全是文字的报告谁都不愿意看。(不过我这文章也差不多,哈哈) “图“主要包括表格、流程图、图片等,最后我会主要讲述作图的一些要点。
4.1.3 引用其他论文的文字或图片需要进行标注
4.2 研究内容(1~2页)
4.2.1 开头给一个流程图来综述整个项目的研究内容
4.2.2 然后分条概括性描述项目研究内容,每条1~3行文字,不能太多,以我的项目为例就是简单介绍机构设计、动力学建模、步态研究与路径规划、仿真验证四个方面的研究内容,简述时多使用术语。
例:
1.1机构设计
根据张拉整体结构的特点,建模设计张拉整体机器人的基本构型,各部件的空间分布,杆件与绳索的连接方式,进一步完成电控系统的初步设计以及进行硬件材料的选择与生产装配,最终设计组装出张拉整体机器人的初代实体样机。
1.2动力学建模
将机器人结构进行简化,运用拉格朗日方程、牛顿—欧拉递归法、雅可比矩阵对机器人进行精确的运动规划理论研究,并利用仿真软件建立出简化的机器人动力学虚拟样机。
1.3步态研究与运动规划
基于机构设计建立机器人的结构拓扑关系以及动力学虚拟样机的仿真步态对机器人的滚动步态和运动规划进行定性研究。
1.4仿真验证
基于动力学模型在仿真软件中建立机器人的仿真模型,重点研究了适用于张拉整体结构的特殊建模方法。运用Adams和Simulink联合仿真技术对张拉整体机器人的运动方式进行精确模拟,通过对仿真结果的分析,验证已有的步态研究、运动规划的正确性,并对理论研究提供可靠的数据。
———————————————————————————————————————————
4.3 预期目标
这个主要是你自己给自己定个目标,用来合理安排你的研究进度,老师主要看的不是这
4.4 特色与创新(很重要)
这一块的作用是告诉答辩导师你们项目的主要创新点和亮点。所以这部分需要着重强调写出自己项目用到的创新性技术或者需要研究的创新性技术。这块内容可以找老师要一下他的项目申报书参考参考或者看一看其他优秀论文的写法,字数不要太多500字左右概括。
我国首次火星探测任务中巡视器着陆阶段虽然成功但难度系数极高,操作十分复杂凶险。 常见的地外行星探测器在它们可以覆盖的地形和它们对未知环境的鲁棒性方面存在局限性, 它们通常造价昂贵且非常的笨重,这大大增加了任务的成本。而张拉整体结构具有良好的适 应性和弹性,这使得它对机器人极端环境下的探索很有吸引力。下面我给出我的立项报告进行参考。
【 因此本项目将张拉整体结构和巡视器相结合,将张拉整体结构的各种优势应用于巡视器 的设计。该技术将未知环境识别与探测、张拉整体结构的运动规划、动力学建模、机构控制策 略进行技术挖掘与整合。利用视觉测量对未知环境进行三维重构。基于动力学模型设计其精 准操作控制器。本项目所包含的技术创新包含以下方面:
(1) 巡视器的折展技术:基于张拉整体结构的特性,巡视器具有了可折展性,折叠后巡视器极 大的节省了其所占空间,为其他科学元件腾出空间,同时也让巡视器具有穿梭狭窄空间的能 力。
(2) 巡视器的抗冲击策略:基于张拉整体结构的特性,巡视器具有抗冲击性,以此为基础设计 巡视器的抗冲击策略,在巡视器每次坠落或受到撞击时最大限度减少对巡视器机体的冲击, 保护巡视器及其内部的科学载荷。
(3) 巡视器的自动控制策略:巡视器在外星球表面工作,不能做到实施操控,我们团队将设计 一套集合自动避障、自我解救、自动调整姿态等的自我控制系统来实现巡视器在两个命令信 号之间的自我控制。】
4.5 研究方案(能写多详细就写多详细)
按照上面研究内容的顺序,一步一步写。这块是整个立项报告的大头,你问我我tm才刚刚立项我怎么知道我应该研究什么,额,其实立项报告就是这样子的。。。你在立项的时候就得向老师或者投资人展示你已经有完整的研究思路,甚至你已经完成了很多研究工作。这样别人才会觉得你的项目有成功的可能性,投资人才会把钱投资给你。
不过学校老师还是相对宽容的,你也可以选择在这个部分表达你在找资料的时候做出了哪些努力,比如说机构零件怎么设计的,建模方面出现了什么问题,怎么解决的等等,尽量展现你在研究中做出的努力。
研究方案的具体内容你可以在各种数据库(比较常见的比如中国知网、万方、IEEE等等)中找一下你研究方面的论文,研究一下别的硕士博士是怎么做这个项目的,写一些他们的研究过程和成果。
4.6 进度安排(1页)
这个可以参考一下你们学校往年优秀立项报告的样子,学一下甘式图怎么画,这个做的好看一些就行,其实不重要,你不一定就按照这个去做。
4.7 经费预算
列一个表格:
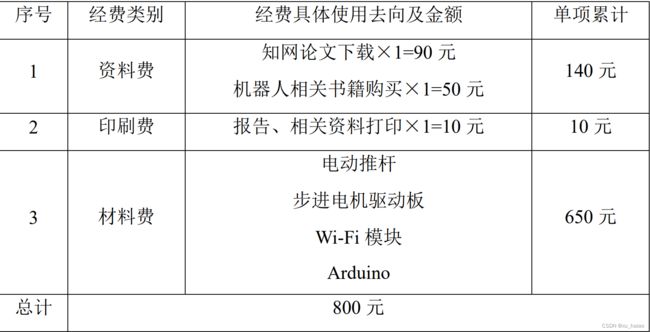
有多少经费就尽量用多少,不要给学校省钱>v>。
尽量写成”单价×个数=钱“这种形式。
4.8 参考文献(大概15~25个,中英文的文献都要有)
多参考些文献,不要就写四五个。前面文献引用的标号要和后面的数字对应。
引用的时候就点一下这个:

然后在这里选一个你想要的复制就行:

Ps:作图的一些要点
论文里你多少要往里面加一些表格、图片,公式,一整页全是文字就会让文章显得特别的枯燥。表格的话用word自带的表格绘制就可以不用太花哨 。
注意记得表格和图片上方或者下方需要统一加上表注和图注,文字样式是word里的题注样式,如果表格或者图片是引用其他文章的也需要进行引用标注。
公式的话推荐使用mathtype这个公式编辑器,word自带的公式编辑器不好看也不好用,这个编辑器有很多快捷键,你用顺了之后打公式速度都能和手写一样快。公式打完之后后面要加上标号。
流程图推荐使用Visio绘画。