二十二.香港大学火星实验室R3LIVE框架跑官方数据集
专栏系列文章如下:
一:Tixiao Shan最新力作LVI-SAM(Lio-SAM+Vins-Mono),基于视觉-激光-惯导里程计的SLAM框架,环境搭建和跑通过程_goldqiu的博客-CSDN博客
二.激光SLAM框架学习之A-LOAM框架---介绍及其演示_goldqiu的博客-CSDN博客
三.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---1.项目文件介绍(除主要源码部分)_goldqiu的博客-CSDN博客
四.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---2.scanRegistration.cpp--前端雷达处理和特征提取_goldqiu的博客-CSDN博客
五.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---3.laserOdometry.cpp--前端雷达里程计和位姿粗估计_goldqiu的博客-CSDN博客
六.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---4.laserMapping.cpp--后端建图和帧位姿精估计(优化)_goldqiu的博客-CSDN博客
七.激光SLAM框架学习之A-LOAM框架---速腾Robosense-16线雷达室内建图_goldqiu的博客-CSDN博客
八.激光SLAM框架学习之LeGO-LOAM框架---框架介绍和运行演示_goldqiu的博客-CSDN博客
九.激光SLAM框架学习之LeGO-LOAM框架---速腾Robosense-16线雷达室外建图和其他框架对比、录包和保存数据_goldqiu的博客-CSDN博客
十.激光SLAM框架学习之LeGO-LOAM框架---算法原理和改进、项目工程代码_goldqiu的博客-CSDN博客
十一.激光惯导LIO-SLAM框架学习之LIO-SAM框架---框架介绍和运行演示
十二.激光SLAM框架学习之livox-loam框架安装和跑数据集_goldqiu的博客-CSDN博客_livox 数据集
十三.激光SLAM框架学习之livox-Mid-70雷达使用和实时室外跑框架_goldqiu的博客-CSDN博客
十四.激光和惯导LIO-SLAM框架学习之惯导内参标定_goldqiu的博客-CSDN博客
十五.激光和惯导LIO-SLAM框架学习之惯导与雷达外参标定(1)_goldqiu的博客-CSDN博客
十六.激光和惯导LIO-SLAM框架学习之配置自用传感器实时室外跑LIO-SAM框架_goldqiu的博客-CSDN博客
十七.激光和惯导LIO-SLAM框架学习之IMU和IMU预积分_goldqiu的博客-CSDN博客
十八.多个SLAM框架(A-LOAM、Lego-loam、LIO-SAM、livox-loam)室外测试效果粗略对比分析_goldqiu的博客-CSDN博客
十九.激光和惯导LIO-SLAM框架学习之项目工程代码介绍---代码框架和一些文件解释_goldqiu的博客-CSDN博客
二十.激光、视觉和惯导LVIO-SLAM框架学习之相机内参标定_goldqiu的博客-CSDN博客
二十一.激光、视觉和惯导LVIO-SLAM框架学习之相机与雷达外参标定(1)_goldqiu的博客-CSDN博客
香港大学火星实验室的r3live框架,是一个实时鲁棒的带有RGB颜色信息的激光雷达-惯性-视觉紧耦合系统。
github如下:
https://github.com/hku-mars/r3live.git
安装依赖:
sudo apt-get install ros-XXX-cv-bridge ros-XXX-tf ros-XXX-message-filters ros-XXX-image-transport ros-XXX-image-transport*安装livox雷达:https://github.com/Livox-SDK/livox_ros_driver.git
sudo apt-get install libcgal-dev pcl-tools查看opencv版本:pkg-config --modversion opencv
安装3.3.1, 3.4.16, 4.2.1 and 4.5.3. 都可
编译:
cd ~/catkin_ws/src
git clone https://github.com/hku-mars/r3live.git
cd ../
catkin_make
source ~/catkin_ws/devel/setup.bash报错:
/usr/include/flann/ext/lz4.h:196:57: error: conflicting declaration ‘typedef struct LZ4_stream_t LZ4_stream_t’
typedef struct { long long table[LZ4_STREAMSIZE_U64]; } LZ4_stream_t;解决办法:
sudo mv /usr/include/flann/ext/lz4.h /usr/include/flann/ext/lz4.h.bak
sudo mv /usr/include/flann/ext/lz4hc.h /usr/include/flann/ext/lz4.h.bak
sudo ln -s /usr/include/lz4.h /usr/include/flann/ext/lz4.h
sudo ln -s /usr/include/lz4hc.h /usr/include/flann/ext/lz4hc.h运行:
roslaunch r3live r3live_bag.launch
rosbag play YOUR_DOWNLOADED.bag效果如下:
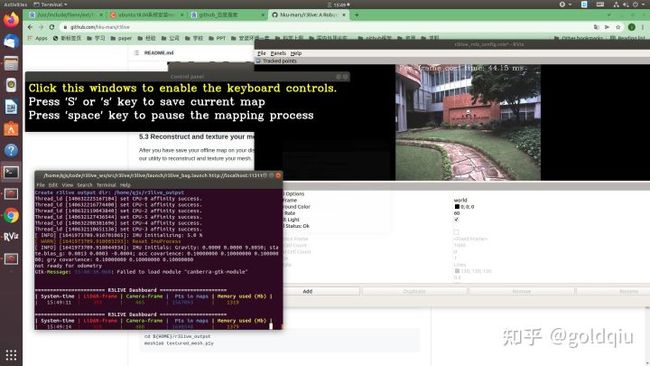
保存pcd如下:

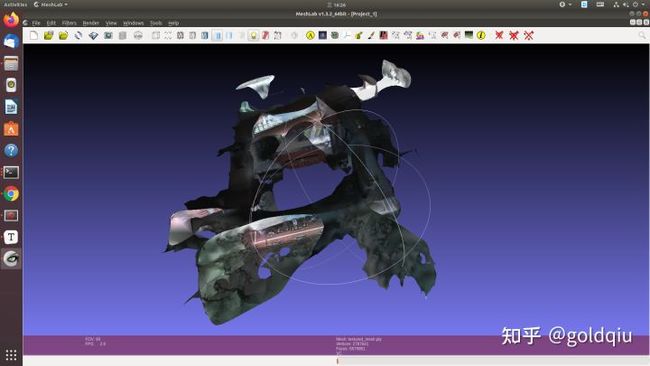
重建为ply格式
roslaunch r3live r3live_reconstruct_mesh.launch安装meshlab
sudo apt-get install pcl-tools meshlab
cd ${HOME}/r3live_output
meshlab textured_mesh.ply显示如下: