【EHub_tx1_tx2_E100】Ubuntu18.04 + ROS_ Melodic + NVISTAR VP300 激光雷达 评测
简介:介绍NVISTAR 的二维DTOF激光雷达 在EHub_tx1_tx2_E100载板,TX1核心模块环境(Ubuntu18.04)下测试ROS驱动,打开使用RVIZ 查看点云数据,本文的前提条件是你的TX1里已经安装了ROS版本:Melodic。
关于测试硬件EHub_tx1_tx2_E100载板请查看:EdgeBox_EHub_tx1_tx2_E100 开发板评测_机器人虎哥的博客-CSDN博客
目录
一、参数指标:
二、官方资料获取
三、NVISTAR 点云客户端(windows版本)使用(micro-USB)
3.1 获取工具软件
3.2 雷达接入WIN电脑
3.3 工具软件链接雷达
四、ROS环境显示点云(micro-USB)
4.1 建立工作空间
4.拷贝代码
4.3 编译源码包
4.4 将雷达通过USB 接入系统
4.5 串口配置
4.5 启动驱动
4.6 启动RVIZ查看点云
一、参数指标:
-
激光波长:905nm,class I
-
探测范围:0.1m~50m
-
重复精度:3cm
-
水平视场角:300°
-
测量频率:5KHZ~60KHZ
-
扫描频率:10HZ~30HZ
-
水平角分辨率:0.18°(10HZ)~0.54°(30HZ)
-
抗强光:>80000LX
-
电源供电:5V/500mA
-
功耗:<2.5w
-
外形尺寸:50mm * 50mm * 75mm
-
重量:150g
-
防护等级:IP65
-
接口:micro-USB、以太网口、RS232、NPN
-
工作环境温度:-10℃~55℃
-
存储环境温度:-30℃~75℃
二、官方资料获取
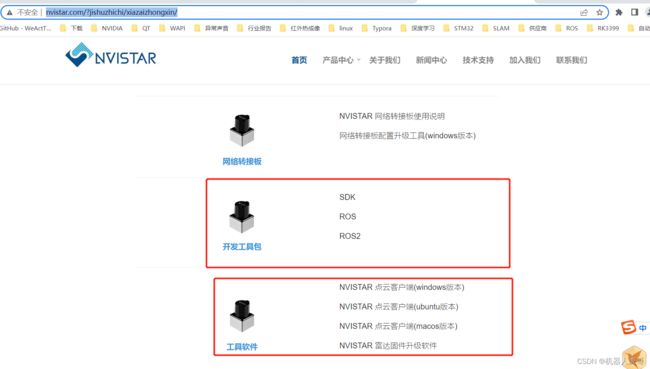
官网下载中心:下载中心-深圳市不止技术有限公司-深圳市不止技术有限公司

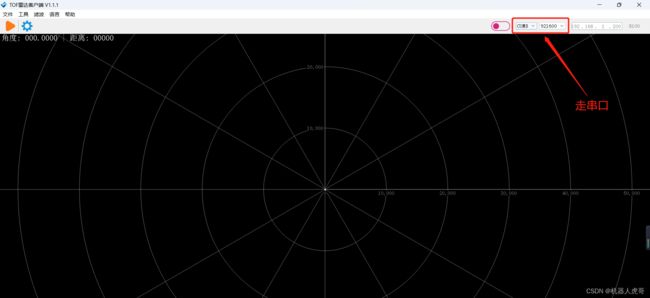
三、NVISTAR 点云客户端(windows版本)使用(micro-USB)
3.1 获取工具软件
下载解压后,获得文件和使用说明:
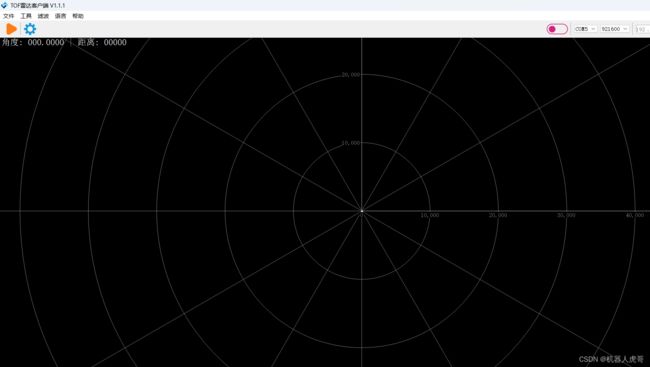
 软件是免安装版本,直接打开即可:
软件是免安装版本,直接打开即可:
3.2 雷达接入WIN电脑
3.3 工具软件链接雷达


四、ROS环境显示点云(micro-USB)
包获取地址:ROS
4.1 建立工作空间
mkdir -p ~/Nvistar_ws/src
cd ~/Nvistar_ws/
catkin_make
source devel/setup.bash4.拷贝代码
cd ~/Nvistar_ws/src
#将官网地址的代码包放置到这个目录解压
#解压包
unzip NVISTAR_ROS.zip 
官方也提供了git下载的维护,和这步操作作用一致
cd ~/Nvistar_ws/src
git clone https://gitee.com/nvilidar/nvilidar_ros.git4.3 编译源码包
cd ~/Nvistar_ws
catkin_make --pkg nvilidar_ros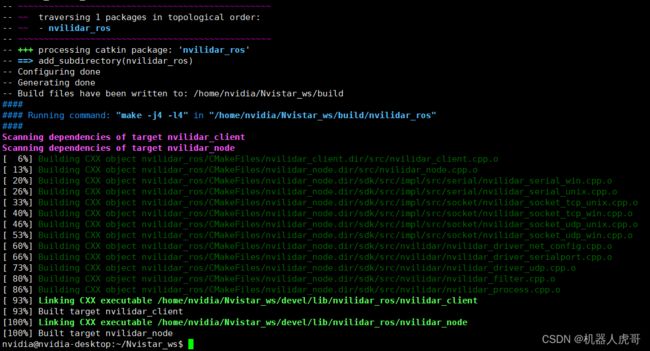
编译完成。
4.4 将雷达通过USB 接入系统
lsusb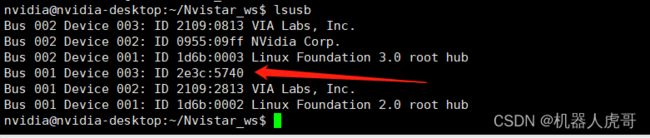
ls /dev
4.5 串口配置
如果你想实现串口重映射名称,则采用如下的步骤:
if you want to use the unchanging device name,Create the name "/dev/nvilidar" to rename serialport
cd ~/Nvistar_ws
source devel/setup.bash
roscd nvilidar_ros/startup
sudo chmod 777 ./*
sudo sh initenv.sh执行完毕后,重新插拔雷达USB口
ls /dev
给当前用户放开串口权限:if you use the lidar device name,you must give the permissions to user.
if you use the lidar device name,you must give the permissions to user.
---whoami
get the user name.link ubuntu.
---sudo usermod -a -G dialout ubuntu
ubuntu is the user name.
---sudo reboot我自己的步骤:
sudo usermod -a -G dialout nvidia
sudo reboot4.5 启动驱动
/home/nvidia/Nvistar_ws/src/nvilidar_ros/launch/lidar.launch 脚本内容
可根据你实际的硬件环境和需要,修改串口,扫描角度等参数。
启动:
cd ~/Nvistar_ws
source devel/setup.bash
roslaunch nvilidar_ros lidar.launch 
4.6 启动RVIZ查看点云
打开终端,启动IMU节点
cd ~/Nvistar_ws
source devel/setup.bash
roslaunch nvilidar_ros lidar.launch 打开新终端,启动rviz
rosrun rviz rviz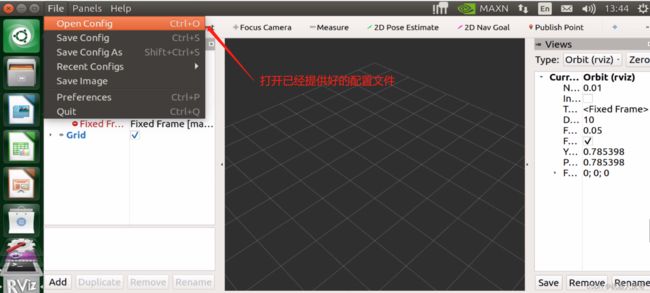


纠错,疑问,交流: [email protected]