【曲线全局逼近】
曲线全局逼近
本文是基于 这篇文章 翻译而来的,仅学习。
在插值中,插值曲线以给定的顺序通过所有给定的数据点。正如在全局插值页面中所讨论的,插值曲线可能会在所有数据点上摆动,而不是紧紧跟随数据多边形。为了克服这个问题,引入了逼近技术,放宽了曲线必须包含所有数据点的严格要求。在全局近似中,除了第一个和最后一个数据点外,曲线不必包含每个点。
为了测量曲线“近似”给定数据多边形的程度,使用了误差距离的概念。误差距离是数据点与其曲线上的“对应”点之间的距离。因此,如果这些误差距离的总和最小化,曲线应该紧密地跟随数据多边形的形状。插值曲线当然是这样一种解决方案,因为每个数据点的误差距离都是零。然而,要讨论的公式不太可能产生插值曲线。用这种方法得到的曲线称为近似曲线。
假设我们有n+1个数据点D0, D1,…, Dn,并希望找到一条b样条曲线,它遵循数据多边形的形状,而不实际包含数据点。为此,我们需要另外两个输入:控制点的数量(即h+1)和度数( p ),其中必须保持n > h >= p >= 1。因此,近似比插值更灵活,因为我们不仅选择了度数,还选择了控制点的数量。以下是对我们问题的总结:
 least square:最小二乘
least square:最小二乘
有了h和p,我们可以确定一组参数和节点向量。设参数为t0, t1,…, tn。注意,参数的数量等于数据点的数量。假设p次b样条曲线的近似是

其中P0, P1,…, Ph为 h+1 个未知控制点。由于我们希望曲线通过第一个和最后一个数据点,我们有D0 = C(0) = P0和Dn = C(1) = ph。因此,只有 h - 1 个未知控制点P1, P2,…, Ph-1。考虑到这一点,曲线方程如下所示:

最小二乘的意义
我们如何测量误差距离?由于参数tk对应数据点Dk,因此Dk与曲线上tk对应点的距离为|Dk - C(tk)|。由于该距离由一个平方根组成,不容易处理,因此我们选择使用平方距离|Dk - C(tk)|2。因此,所有误差距离的平方和为

当然,我们的目标是找到那些控制点P1,…, Ph-1,使得函数f()最小化。因此,近似是在最小二乘意义下进行的。
寻找解决方案
这部分有点乱,需要一些线性代数的知识。首先,让我们把Dk - C(tk)改写成另一种形式:

上面给出了D0, Dk和Dn,通过计算N0,p(u)和Nh,p(u)可以得到N0,p(tk)和Nh,p(tk)。点击这里学习如何计算这些系数。为了方便起见,我们定义一个新的向量Qk为:
![]()
那么平方和函数f()可以写成:

接下来,我们将找出误差距离的平方。回想恒等式x·x = |x|2。这意味着向量x与自身的内积给出了x长度的平方。因此,误差平方项可以重写为
然后,f()函数为:
我们如何最小化这个函数?函数f()实际上是一个椭圆抛物面,变量P1,…, Ph-1。因此,我们对f()对每个Pg进行微分,并找到这些偏导数的公共零。这些0是函数f()达到其最小值时的值。
在计算对Pg的导数时,请注意所有Qk和Ni,p(tk)都是常数(即不涉及Pk),它们对任何Pg的偏导数必须为零。因此,我们有

考虑求和中的第二项,它是Ni,p(tk)Pi · Qk的和。各子项的导数计算如下:

只有当i = g时,Pi对Pg的偏导数是非零的,因此,第二项的偏导数为:

第三项的导数更复杂;但这仍然很简单。下面使用乘法规则(f·g)’ = f ‘·g + f·g’。
如果i不等于g,则Pi对Pg的偏导数为零,因此求和中的第三项对Pg的偏导数为:

结合这些结果,f()对Pg的偏导数为

将其设置为0,我们得到以下内容:

因为我们有h-1变量,g从1到h-1,有h-1这样的方程。注意,这些方程在未知数Pi中是线性的。在继续之前,我们先定义三个矩阵:

这里,P的第k行是向量Pk, Q的第k行是上面第k个方程的右边,N的第k行包含了在tk 计算 N1,P(u), N2,P(u),…, Nh-1,p(u)的值。因此,如果输入数据点是s维向量,P、N和Q分别是(h-1)×s、(N -1)×(h-1)和(h-1)×s矩阵。
现在我们重写第g个线性方程

转换成另一种形式,以便容易读出Pi的系数:

最后,Pi的系数是

如果你观察矩阵N,你会看到Ng,p(t1), Ng,p(t2),…, Ng,p(tn-1)为N的第g列,Ni,p(t1), Ni,p(t2),…, Ni,p(tn-1)是N的第i列。注意,N的第g列是N的转置矩阵 NT的第g行,Pi的系数是NT的第g行和N的第i列的“内积”。根据这种观察,线性方程组可以重写为
![]()
由于N和Q是已知的,求解P的线性方程组可以得到所需的控制点。当然,我们已经找到了解决方案。
算法
虽然上一节的开发过程冗长而乏味,但最终结果却出奇地简单:解一个线性方程组,就像我们在全局插值中遇到的那样。因此,全局近似的算法也非常简单。
-
输入:n+1个数据点D0, D1,…, Dn,度p,所需控制点数量h+1;
-
输出:p次b样条曲线,由h+1个控制点定义,逼近给定的数据点;
-
算法:
Obtain a set of parameters t0, …, tn and a knot vector U;
Let P0 = D0 and Ph = Dn;
for k := 1 to n-1 do
Compute Qk with the following formula:

for i := 1 to h-1 do
Compute the following and save it to the i-th row of matrix Q;

/* matrix Q is available /
for k := 1 to n-1 do
for i := 1 to h-1 do
Compute Ni,p(tk) and save to row k and column i of N;
/ matrix N is available */
Compute M = NT·N;
Solving for P from M·P = Q;
Row i of P is control point Pi;
Control points P0, …, Ph, knot vector U and degree p determines an approximation B-spline curve;
度和控制点数量的影响
很明显,数据点对近似曲线的形状有影响。p度和控制点的数量对曲线形状的影响是什么?下图显示了10个数据点(n=9)在不同的度数和控制点数量下的近似曲线。每一行给出次数相同但控制点个数不同的近似曲线,每一列给出次数相同但控制点个数不同的近似曲线。注意,所有曲线都使用向心方法来计算其参数。

可以理解的是,低阶曲线通常不能很好地逼近数据多边形,因为它们不是很灵活。因此,在每一列上,阶数越高,结果越好(即越接近数据多边形)。基于同样的原因,控制顶点越多,逼近曲线的灵活性越高。因此,在每一行上,随着控制点数量的增加,曲线变得更接近数据多边形。
我们应该使用高阶曲线和许多控制点吗?答案是否定的,因为全局逼近可能比全局插值使用更少的控制点。如果控制点的数量等于数据点的数量,全局逼近就变成了全局插值,我们就可以使用全局插值!至于次数,我们当然希望是最小的次数,只要生成的曲线能符合数据多边形的形状。
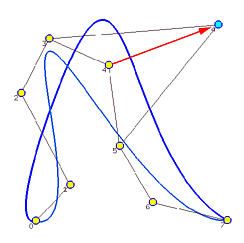
为什么这个方法是全局的?
这种近似方法是全局的,因为改变数据点的位置会导致整个曲线发生变化。下图中的黄色点是给定的数据点,将被3次b样条曲线和5个控制点(即n = 7, p=3和h = 4)近似。参数是用向心方法计算的。假设数据点4被移动到一个由浅蓝色点表示的新位置。新的近似b样条是蓝色的。如你所见,除了第一个和最后一个数据点被算法固定外,原始曲线和新曲线的形状非常不同。因此,由于修改数据点而产生的变化是全局的!
补充:距离度量常见的有几何距离和代数距离。几何距离表示某点到曲线最近点的距离。平面内某点(x0,y0)到方程 f(x,y)=0 所代表曲线的代数距离就是 f(x0,y0)。