在结构异质的云杉林中使用机载激光扫描仪数据进行单树分割
论文题目:Single Tree Segmentation Using Airborne Laser Scanner Data in a Structurally Heterogeneous Spruce Forest
Abstract
在这项研究中,我们提出了一种基于机载激光扫描的树冠表面模型 (CSM) 及其相应点云的单树分割和表征的新方法。该方法包括用于控制冠段形状和冠层表面模型 (CSM) 残差调整的新算法。我们提出了一个衡量定位树成功与否的新标准,并演示了如何使用该标准来优化 CSM 平滑度。从调整后的 CSM 段中,我们得出树高和树冠直径,并根据段内的所有首次激光脉冲测量,我们得出树冠基部高度。该方法在挪威云杉为主的具有异质结构的森林保护区中得到应用和验证。自动检测到的树木数量随树木的社会地位而变化,从 93% 的优势树木到 19% 的被抑制树木。树高、树冠直径和树冠基部高度的 RMSE 值分别约为 1.2 m、1.1 m 和 3.5 m。该方法高估了树冠直径 (0.8 m) 和树冠基部高度 (3.0 m)。
Introduction
最先进的机载激光扫描仪系统可生成精确的地理参考高密度点云数据集。随着近年来该领域技术的快速进步,出现了用于推导单棵树关键数据的引人入胜的新方法。开发的方法已经成功地产生了关于树木位置和高度的高质量数据,以及对树干直径和体积、树冠大小甚至树种的相当好的估计(Hyyppä 等人,2001a;Persson 等人,2002 年;Holmgren 和 Persson,2004 年; Morsdorf 等人,2004 年)。该领域需要继续研究,因为现有方法在很大程度上是针对特定森林类型开发和测试的,它们包含许多具有任意值的参数设置,这些参数设置不能轻易用于其他森林类型,并且许多这些方法没有很好的描述,也不容易获得。此外,三维 (3D) 冠尺寸估计仍然很少研究。
现有方法的共同特征是提取树冠的冠层表面模型 (CSM),定位局部最大值,并在每个局部最大值周围定义一个段以表示单个树木。基于激光点提取 CSM 栅格网格的算法包括使用最大 Z 值和空网格节点插值(Hyyppä 等人,2001a;Brandtberg 等人,2003 年;Maltamo 等人,2004 年)、克里金法(Popescu 和Wynne,2004 年)、“活动轮廓算法”(Persson 等人,2002 年;Weinacker 等人,2004 年)和 Toposys 方法(Morsdorf 等人,2004 年),然后是高斯低通滤波器进行平滑处理。树木位于局部最大值处,是在八个邻居(Persson 等人,2002 年;Hyyppä 等人,2001a;Morsdorf 等人,2004 年)或更大的社区(Popescu 和 Wynne, 2004 年;Weinacker 等人 2004 年),或与模板匹配,例如二阶导数 blob 签名(Brandtberg 等人,2003 年)。导出段的算法基于 CSM 的几何形状,即围绕局部最大值的斜率(Persson 等人,2002 年;Hyyppä 等人,2001a),或使用局部最大值作为点 3D 聚类的起始位置云(Morsdorf 等人,2004 年)。然而,很少有人关注段的形状,分水岭或区域增长算法很容易产生不合适的形状段。 Hyyppä 等人 (2001a) 包括了一个基于到线段重心距离的标准,以避免不合适的多边形形状。 Weinacker 等人 (2004) 将奇形怪状的多边形识别为长度至少是其宽度的 2.5 倍,并将它们分成两个或更多部分。他们还使用射线算法通过切断线段外围的陡峭部分来将树冠与间隙分开。
正如许多研究报告的那样,设置 CSM 的平滑程度代表了两个成功标准(即遗漏和佣金)之间的关键平衡。温和的平滑会导致大部分找到的树,但会留下太多的“假”树,反之亦然。通常在尝试各种替代方案后仔细选择设置。需要一个能够反映这两个方面的标准。虽然我们在这里指出需要一个标准来反映局部最大值的优度作为树梢的表示,但另一种方法是一个标准来反映片段的优度作为树冠轮廓的表示。 Brandtberg 等人 (2003) 开发了一个标准,用于测量基于模糊图像处理的部分与地面测量的冠部分的拟合程度。Straub 和 Heipke (2004) 使用成对线段之间的拓扑关系,即从不相交到重叠到相等的不同程度。 Weinacker 等人 (2004) 制定了一套规则,用于根据线段的高度、面积和距离确定线段的最终合并或拆分。
在挪威,出于各种原因,迫切需要提供来自遥感的单棵树数据,尤其是树冠数据。首先,人们正在努力开发基于叶质量和树冠密度的无偏估计树木健康的方法,这是一个关键的森林健康变量(Solberg 等人,2005 年)。这项工作在很大程度上依赖于单棵树的树冠数据。其次,出于森林规划的目的,人们越来越关注大规模的单一树木数据,强调与木材质量相关的生物物理特性的价值(Næsset 和 Økland,2002)。
因此,本研究的目的是开发一种新的单树分割方法。所提出的方法与现有方法有许多相似之处。但是,它包括用于估算冠基高度、CSM 剩余调整以及控制冠段形状的新算法。在这项研究中,我们还提出了一个衡量树木定位成功的新标准,并演示了如何使用该标准来优化 CSM 平滑度。最后,所提出的方法在具有相当异质结构的森林中应用和验证,我们评估了该方法对属于不同社会地位类别的树木的性能。
Materials and Methods
Study Area
为了开发和验证单树分割新方法,并测试其在异质林中分割单棵树的能力,本研究选择了天然林保护区的试验地点。该区域面积 6 平方公里,位于挪威东南部奥斯陆市附近(北纬 59° 50°,东经 11° 02°,海拔 190 至 370 米)。森林以挪威云杉 (Picea abies (L.) Karst.) 为主,部分多层,分布在不同的社会地位等级。自 1940 年以来就没有砍伐过,被认为是原始森林。
Sample Plot Inventory
地面数据是在 2003 年夏季收集的。我们主观选择了八个以云杉为主的地点,在这些地点建立了 0.1 公顷的圆形样地。这些地块上其他物种的基础面积不到 5%。每个地块上的树木数量介于 65 到 120 棵之间。
对于所有胸径 (DBH) ≥ 3 cm 的树木,我们记录了地块中心的极坐标、树种、胸径和社会地位 (Schotte, 1912)。这 817 棵树分布在社会地位等级 1 到 5,其中 19% 的优势树(1 级)、15% 的共同优势树(2 级)、14% 的次优势树(3 级)、42% 的抑制树(4 级) , 和 10% 的死树 (5 级), 分别。部分树木有特殊说明,即18棵树最近断顶或断杆,13棵树弯曲或挂树,9棵树有双顶或多顶。除云杉外,其他树种有 124 棵落叶树和一棵欧洲赤松。
在每个地块上选择八个样本树进行进一步测量。首先,系统地选择未被抑制的树的四个样本树,在每个主要基本方向之后,第一个树被发现顺时针围绕地块。此外,我们在所有的社会地位等级中选择了四棵树,它们是最接近第一批样本树的树。在样树上,我们测量了四个主要方向的树高、树冠基部高度和树冠半径。平均冠直径计算为平均冠半径乘以2。用Vertex型高度计测量样本树的高度。在其中一个地块(地块#1)上进行额外的测量,其中每棵树都根据针对样本树描述的测量方案进行了完整的测量。直径和树高的样地平均值分别为25 ~ 34厘米和20 ~ 28米。
我们使用差分全球导航卫星系统(GNSS)来确定地块坐标。通过全球定位系统(GPS)和全球导航卫星系统(GLONASS)确定每个地块中心的平面地块坐标(Euref89)。Topcon Legacy-E 20信道双频接收机用于观测两个系统的伪距和载波相位,被用作流动站设备。接收器设置有两秒钟的记录速率,与天线成15°角(截止角)以下的所有卫星都被忽略。每个地块的测井周期在0.5到1.5小时之间,平均天线高度为4米。类似的拓普康Legacy-E GPS?GLONASS接收机被用作距离为?距离样地2.5公里。基站的平面坐标(X和Y)以大约0.4厘米的精度确定。在流动站坐标的后处理过程中,基站记录被用作参考。为了确保基站接收的信号来自与流动站相同的卫星,截止角被设置为12°。通过Topcon/Javad公司的Pinnacle版软件包(Javad定位系统,1999年)对所有漫游者记录进行后处理。来自后处理的随机误差报告以及nsset(2001年)的研究表明,除了一个估计误差为80厘米的地块外,所有地块的平面坐标误差都小于1厘米。
Airborne Laser Scanner Data
一架休斯500直升机搭载了加拿大Optech公司生产的ALTM 1233激光扫描系统。激光扫描仪数据是在 2003 年 10 月 9 日获得的。叶子状况处于中间状态,即落叶树仍然是多叶的。平均飞行高度约为地面以上 600 米,平均速度为 35 ms?1。飞行了 21 条航线,相邻航线之间的重叠率约为 20%。传输了大约 3700 万个脉冲。脉冲重复频率为 33 kHz,扫描频率为 50 Hz。最大扫描角为 11°,对应于大约 230 m 的平均条带宽度。以超过 10.5° 的扫描角度传输的脉冲被排除在最终数据集中。足迹的平均直径为 18 厘米。传输的平均脉冲数为 5.0 m?2。记录了第一个和最后一个回波。
激光数据的初始处理由承包商(Blom Geomatics,挪威)完成。为所有第一次和最后一次返回计算平面坐标(X 和 Y)和椭圆体高度值。执行条带之间的匹配以消除方向错误。最后返回的数据用于模拟地形表面。在承包商使用专有程序 (Terrasolid, Ltd., 2004) 进行的过滤操作中,假设代表植被命中的局部最大值被丢弃。根据最后一个脉冲数据集中保留的各个地形地面点的平面坐标和相应高度值生成不规则三角网 (TIN)。 TIN 模型的椭圆体高度精度预计约为 25 厘米(Kraus 和 Pfeifer,1998 年;Reutebuch 等人,2003 年;Hodgson 和 Bresnahan,2004 年)。
所有第一次返回的回波都在空间上注册到 TIN。通过 TIN 的线性插值计算每个回波的地形表面高度值。每个回波的相对高度计算为其高度与地形表面高度之间的差值。激光扫描产生了一个数据集,其中观察结果相当随机地分布在该地区。回声的密度随着该地区的部分地区被直升机不止一次的飞越所覆盖而变化。
Tree Segmentation and Assessment of the Tree Characteristics
所提出的从激光点云中分割单棵树的方法包括四个主要步骤,即(a)数据细化,(b)表面建模,(c)局部最大值的识别,以及(d)围绕每个最大值开发段。如上所述,在文献中描述的大多数方法中都存在类似的主要步骤顺序。然而,我们改进的三个主要重点是优化CSM平滑度、控制段的形状以及利用残差分析对CSM进行最终校正。新算法的细节如下所示。仅使用了第一个返回回波。当我们测试算法时,我们在一个半径为22米的圆形区域上工作,即 0.1公顷地块外4.8米,以包括靠近地块外围的树木的整个树冠,并且可能是具有它们的树木位于0.1公顷地块内的茎。
Data Thinning
最初,进行了数据细化以丢弃最有可能来自冠层表面以下的回波。每当两个回波在 X 和 Y 方向上相邻时,只保留最上面的观测值。我们使用以每个激光点为中心的圆形水平搜索窗口,邻接阈值由该窗口的大小设置。此步骤包含平滑元素,即窗口越大,CSM 越平滑。因此,这个过滤器窗口的大小是我们想要优化的一个设置,我们使用了四个替代值作为窗口半径:30、50、70 和 90 厘米。下面介绍了有关优化窗口大小的过程的更多详细信息。
Surface Modelling
保留的激光点被插值到 25 × 25 25 \times 25 25×25厘米网格。我们使用“最小曲率”算法(Smith 和 Wessel,1990 年),因为众所周知,它通常可以为表面建模产生良好的结果,并且是一种快速的方法。表面是迭代获得的,从通过 Z 对 X 和 Y 的线性回归估计的平面开始。然后通过在每个步骤中将插值残差添加到 Z 值来迭代平滑该平面,使其越来越接近激光点每个网格节点,直到网格节点中估计的 Z 值的连续变化小于 10 厘米。最小曲率模型是一种非精确方法,因为 CSM 没有精确地穿过激光点。优点是它允许表面向上延伸超过树梢的最高点。在此网格化中,我们没有其他平滑设置。该算法包含可能影响平滑程度的“张力”设置。我们最初改变了这种张力设置。但是,我们没有发现不同设置对 CSM 有明显影响,因此我们将设置保持在一个推荐值。
最小曲率 CSM 网格由高斯低通 3 × 3 3 \times 3 3×3过滤器,由 Hyyppä 等人 (2001a) 和 Morsdorf 等人 (2004) 使用。滤波器权重对于内核节点是四分之一,对于 X 和 Y 方向上的邻居是八分之一,对于对角线邻居是十六分之一。重复过滤会增加平滑度,过滤器运行次数是我们想要优化的第二个平滑设置,请参阅下面的详细信息。我们使用了四种可供选择的过滤次数,即 1、3、5 和 7。
Identification of Local Maxima
由此产生的 CSM 用于识别局部最大值和开发树段。我们将局部最大值定义为 Z 值高于其八个网格邻居的网格节点。
Developing Segments
我们采用区域增长算法,使用局部最大值作为种子点,并开发了一种包含线段形状控制的算法。这些段是通过从局部最大值向下连续扩展而开发的。我们使用八连接,即每个网格节点连接到八个邻居。在每个步骤中,如果满足两个条件,则将新的网格节点添加到一个段中。首先,该算法要求该节点的最陡上坡邻居已包含在该段中。对于 X 和 Y 方向上的邻居,倾斜角定义为 Δ Z \Delta Z ΔZ,对于对角线邻居,则定义为 Δ Z / 2 \Delta Z / \sqrt{2} ΔZ/2。

图 1. 线段的星形限制原理,以区域增长算法的一步为例进行说明。在此步骤中,线段(灰色)包含局部最大值 (●) 和内部节点。下一步 (❍) 可接受的候选对象具有这样的特征,即它与局部最大值之间的直线将完全包含在新多边形内。我们对位于与局部最大值直接水平或垂直的直线上的节点提出了额外的要求:在它们被包含之前,它们需要让所有三个邻居都向内到线段内的局部最大值。对于不可接受的候选者 (■) 的邻居节点,无法满足这些条件。这是针对两个节点显示的。
其次,我们对该算法施加了限制,以获得具有适当树状形状的线段,即仅允许星形多边形。这些是多边形,其中任何节点和局部最大值之间的线段将完全包含在多边形内(图 1)(Shermer 和 Toussaint,1992)。除了产生适当的树状形状外,它的优点是可以通过根据它们与局部最大值的角度对它们进行排序来获得一系列外围节点,我们利用它来加快生成线段多边形向量的过程.
分段完成后,整个 CSM 被提升以补偿激光脉冲部分穿透到树冠层(例如,Gaveau 和 Hill,2003),以及 CSM 平滑造成的树梢周围 CSM 的降低.激光脉冲穿透力会随着冠层密度而变化,也可能会因树种而异 (Næsset, 2004)。因此,我们的想法是使用所有地块通用的固定残差百分位值,而不是固定的仪表值。要使用的实际百分位值是根据测量的树高与 CSM 中相应局部最大值的高度之间的差异计算得出的。这必须在树木样本上完成,我们手头有两个样本:地块 #1 上的所有活树和非抑制树以及所有地块上的所有样本树。我们在这里决定使用前者,因为这个样本应该更能代表所有社会地位阶层。我们计算了图 #1 中这些差异的中值,并找到了相应的残差百分位数(图 2)。使用中值而不是平均值,因为在少数情况下,一棵高大的树可能与较低的局部最大值相关联,反之亦然,因此中值更为合适。此中值用作调整,即将其添加到整个 CSM 的 Z 值。对于其他每个图,我们读取对应于相同百分位数的值,并添加到它们的 CSM 中。这些经过残差调整的 CSM 中的局部最大值的高度现在被视为激光衍生的树高估计值。
Assessments of Tree Characteristics
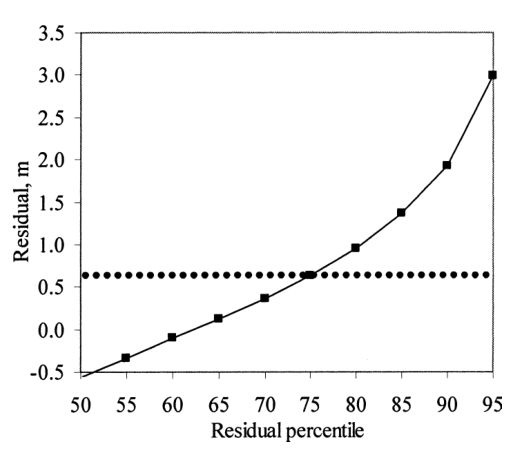
图 2. Plot #1 树高的残差百分位值。水平线是社会地位等级 1 至 3 的树木高度与相应局部最大值的高度之间的中位数差异,没有残差调整。此中位数差异 (62 cm) 对应于残差的第 75 个百分位数。

图 3.(左侧)从东方看到的主要云杉树,具有激光回波和建模的树冠轮廓,即 CSM 和树冠基部高度。 CSM 以轮廓(外轮廓)和通过茎的垂直平面的轮廓(内轮廓)给出。后者与用于估计激光衍生牙冠宽度的算法一致。基于地面测量值(树高、树冠基部高度和树冠宽度)的树冠轮廓由框表示。还指示了茎,即其基于地面数据的位置和高度。被抑制的小树的位置和高度用小树干表示。(右侧)从上方看到的树段,标明了基于地面的树冠半径。
这个冠层表面模型现在覆盖了整个区域,因此覆盖了冠层间隙中的许多网格节点,即在地面或至少低于树冠底部高度。我们现在介绍一种为每个段定义冠底高度的方法,然后删除 CSM 低于此冠底高度的部分。树木特定的树冠基高是根据每个段内的第一次返回的点云估计的。从这些激光点云中的每一个,我们计算了高度分布的十分位数。冠底高度设置在与其相邻十分位向下距离最大的十分位,参见图 3 中的示例。通常,地面上有许多回波,因此几乎在地面上经常有几个十分位靠在一起。在它们上方通常很少有回声,因此向上到下一个十分位的跨度很大。然后将冠基高度设置为此十分位数。为了使树冠与地面明显分离,最小树冠基高被定义为剩余调整值(见上文)加上 25 厘米,在当前数据中合计约为 85 厘米。
在切断冠基下方的部分后,根据残差调整后的 CSM 中的每个部分估算冠直径。它们的估计方式应该与地面测量结果很好地对应。一些作者建议将树冠直径估计为圆的直径,该圆的面积对应于树冠部分的水平面积(例如,Hyyppä 等人,2001a;Persson 等人,2002 年;Morsdorf 等人,2004 年)。然而,我们采用了一种算法,其中从主要方向上的局部最大值中获取四个冠半径,并将这些半径取平均值并加倍为每段一个冠直径值。
Ground and Segments Correspondence
根据位置和树高,树冠段与地面测量的树木相匹配。每个部分被分配给在地面上测量的最高树,其茎位置在该部分内。并非所有树木都有高度测量值。在这些情况下,它们的高度是根据通过线性回归估计的地块特定高度-直径关系估计的。与此类研究中的往常一样,某些部分被证明是假树,即该部分内没有树干,反之亦然,一些树最终没有 CSM 部分。
在匹配之前,我们使用南北和东西方向的地块特定偏移值以及极坐标中的方位校正了地面数据的地理参考。这是通过局部最大值和树之间的初始匹配完成的。茎的位置通过 X、Y 和角度的图式中值差异进行调整。这样做了两次。除了一块(地块 #1)为 90 厘米外,所有地块的偏移校正都很小。该偏移可能是由于靠近地块的高悬崖引起的多路径问题导致 GNSS 位置错误造成的。
Optimizing and Smoothing
我们想要优化两个关键设置,即网格化之前数据细化搜索窗口的大小和网格化之后的高斯运行次数。两者都对 CSM 有平滑作用,即像打磨树冠表面一样。宽数据过滤器窗口和大量高斯运行都使 CSM 平滑。过滤的优点是去除不太可能成为候选树的局部最大值,例如向上延伸的分支和来自同一棵树的双顶。然而,过滤的缺点是去除了真正的树顶。我们想在这些得失之间找到一个适当的平衡点。为了找到最佳权衡,我们制定了一个标准,将成功的这两个方面结合到一个可以优化的变量中:
![]()
其中 QuantCrit 在 0 到 1 的范围内衡量定量成功,并且是已识别的社会地位 1 到 3 类树木的比例。 QualCrit 以 0 到 1 的范围内的局部最大值与其相应树的接近程度来衡量定性成功。因此,QualCrit 的估算方式为:
![]()
其中 d b a r d_{\mathrm{bar}} dbar是局部最大值与其对应的茎位置之间的平均距离, d rand d_{\text {rand }} drand 是局部最大值随机分布时的预期平均距离。这被估计为从随机树位置到区域上规则二次网格中最近节点的预期距离。可以证明这个期望距离为:

其中 A A A是区域的大小, n n n是网格点的数量,应该等于局部最大值的数量。