Single Tree Segmentation and Diameter at Breast Height Estimation With Mobile LiDAR
ABSTRACT
胸径(DBH)是监测森林生态最重要的变量之一。移动激光扫描技术(MLS)已广泛应用于林业领域,使DBH测量变得快捷方便。然而,中性森林环境中灌木和枯木较多,MLS得到的点云质量易受环境影响,导致单棵树分割和DBH估计精度较低。为了提高在复杂森林环境和低点云质量下的精度,提出了相对密度分割法用于单棵树分割,基于多高径的DBH估计法用于DBH估计。相对密度分割法根据两个不同尺度上的密度之比计算相对密度,通过树干点云相对于其周围点的相对密度较高来分割树干。在天然林样地中,该方法的准确率和召回率分别达到了0.966和0.946;在城市森林地块中,准确率和召回率分别达到1和0.966。提出的DBH估计方法被用于使用多高度直径来估计树木的DBH。当树干点云存在较大噪声时,多高度直径结合离群点检测算法能够提高准确性和鲁棒性。对于DBH估计结果,平均绝对误差(MAE)、平均绝对百分比误差(MAPE)和均方根误差(RMSE)在天然林样地中分别为2.5厘米、11.54%和3.17厘米,在城市森林样地中分别为1.65厘米、6.31%和1.97厘米。实验结果表明,该方法能够实现准确、稳健的DBH提取,为森林资源监管和可持续发展提供基础数据。
INDEX TERMS 胸径,移动激光扫描,点云,单木分割。
I. INTRODUCTION
树的胸径(DBH)是高于地面1.3米处的树干直径[1]。能够快速获取树木DBH对于监测森林生态系统非常重要。大多数传统的寻找DBH的方法都是基于人工测量,这需要大量的人力和工作时间。也很难在短时间内大面积收集周期性数据。
近年来,随着激光雷达(lidar)技术在林业领域的应用越来越多,LiDAR成为林业调查最重要的方法之一[2]-[5]。地面激光扫描(TLS)和移动激光扫描(MLS)是获取森林林下三维(3D)数据的最常见方式[6]。TLS可以实现对树干更高的扫描精度,提取高精度的激光点云数据。
Trochta等人[7]通过基于点的方法的距离来分割树木,并根据通过TLS和最小二乘回归(LSR)获得的点云来估计树木的DBH,与测量值相比,误差小于1 cm。齐等[8]利用蚁群算法和B样条曲线拟合算法实现了基于TLS数据的DBH自动估计。该算法提取DBH的均方根误差(RMSE)为0.19 cm,比传统算法提高了50%。然而,TLS的设备通常巨大、笨重且相对昂贵。TLS点云数据容易被遮挡,需要多个站点扫描完整的场景数据。
随着MLS和同步定位与绘图(SLAM)技术的发展[9],[10],森林三维数据的获取变得更加方便和高效。MLS和SLAM算法的结合实现了实时数据收集和点云配准。与TLS相比,MLS更容易和更方便,因为不需要设置扫描站点。它可以用手或背包携带,通过在森林里行走来收集数据,这将大大节省后期处理时间[11]。
Forsman 等人 [12] 使用二维 (2D) 移动激光扫描仪和惯性导航系统获取森林的 3D 点云,使用树干的点云进行圆拟合。 RMSE 的最佳结果为 14%(37 毫米),是通过在多个 2D 投影簇上进行圆拟合获得的。Zhou等[13]使用Velodyne 16通道LiDAR传感器获取森林3D点云,使用欧几里德聚类算法对树木进行分割,并使用随机样本一致性(RANSAC)算法对树木的DBH进行圆拟合飞机。 Xiao等[14]提出了一种层次聚类的分割方法,在不同高度形成一组点云的横截面切片,通过聚类分析对每个切片进行分割过程。采用随机样本一致性算法对点云切片进行圆拟合,以实现对树胸径的更快估计。
正确的单树分割直接影响胸径估计和森林清查,以往学者采用欧几里德聚类提取法[13]、[15]、层次聚类法[14]、弧检测算法[16]等进行分割。基于 MLS 点云的树,以及一些学者针对机载激光扫描数据开发了基于图的分割[17],都取得了很好的效果。然而在一些森林中,森林地面的特点是崎岖的地形和障碍物,如岩石、灌木和枯木[18],并且有大量的灌木和树叶可能会影响单树分割。同时,由于背包式激光雷达通过在森林中行走获取森林点云,树干点云密度高于周围,森林点云密度也与距离激光雷达传感器的距离有关,这导致不同位置的树点云的平均密度不同。在这项研究中,我们提出了用于单树分割的相对密度分割方法。相对密度分割法通过比灌木和树叶更高的树干点云相对密度对树干进行分割,去除灌木和树叶。相对密度是通过两种不同尺度下点云密度的比值来计算的,因此可以用来分割不同点云密度下的树干。
对于胸径估计,学者们通过用圆拟合1.3 m处的点云切片[12]、[13]、[19]、[20]或用圆柱体拟合树干点云[21]、[22]来估计胸径。因为一些树干直径随着高度的不同有很大的变化,圆柱体可能不适合点云知府。同时,大多数MLS系统都是背负式或手持式移动LiDAR系统,由于移动LiDAR传感器支持16通道或更少通道,MLS的点云精度相对较低,MLS点云质量容易受到行走路径和行走速度的影响,等胸径估计方法,如用不同算法[11],[14],[20],[23],[24]与1.3 m高度点云的圆拟合可能会在树干点云时产生较大误差存在大量的噪音。我们提出了一种基于多高度直径的 DBH 估计方法,用于 MLS 点云 DBH 估计。所提出的胸径估计方法通过多高度直径估计树干胸径,并使用不同的高度直径和多高度直径异常值检测结果来保持较低点云质量或较大噪声下的胸径估计精度。
本文结构如下:第 2 节介绍材料和方法。第 3 节和第 4 节给出结果和讨论,第 5 节给出结论。
II. METERIALS AND METHODS
A. BACKPACK LiDAR SYSTEM
我们在本文中使用的背负式移动激光雷达系统由激光雷达传感器、微型计算机、电池、惯性测量单元 (IMU) 和远程控制客户端组成。 LiDAR 传感器是 Velodyne VLP-16 [25]。 VLP-16激光雷达支持16通道,水平视野360度,垂直视野±15度,数据采集频率10HZ,最大测量距离100米,典型精度±3厘米。 IMU用于获取系统的运动姿态和运动,用于3D SLAM算法。微型计算机运行称为激光测距和映射 (LOAM) [10] 的 3D SLAM 算法,并驱动 LiDAR 传感器和 IMU。远程控制客户端通过网络与微型计算机连接,接收来自微型计算机的实时数据。背负式移动激光雷达系统组件如图 1 所示。
B. EXPERIMENTAL DATA
我们选择了两种不同类型的森林作为试验林,包括天然林和城市森林。通过背负式移动激光雷达系统在森林中行走采集数据,并使用 LOAM [10] 算法生成森林点云。

图 1. 背包式移动 LiDAR 系统组件。光探测和测距 (LiDAR)、惯性测量单元 (IMU)。
天然林地块是位于中国内蒙古省额尔古纳市的混交林(针叶和阔叶)。大小约为68m * 52m,样地内有148棵树,树木平均胸径为24.6 cm,最大胸径为40.5 cm,最小胸径为11.7 cm。天然林样地图像如图2(a)所示,天然林地表坡度不平,林地上有大量灌木和草丛。天然林点云如图2(b)和2(c)所示。树木的点云相对嘈杂且质量较低。
城市森林地块是一个人工公园,位于中国北京市海淀区。大小约为44m * 48m,样地内有58棵树,树木的平均胸径为31 cm,最大胸径为62.4 cm,最小胸径为14.3 cm。城市森林样地图像如图2(d)所示。地面比较平坦,林地的灌木和草丛很少。城市森林点云如图2(e)和2(f)所示。树木点云噪声小,环境相对简单。
C. METHODS
在这项研究中,我们移除了地面点云并对离地点云进行归一化,以将树木的底部设置在相同的高度。并且我们提出了一种用于单个树干分割的相对密度分割方法。相对密度分割法通过点云密度在不同尺度上的比值来计算相对密度,并根据相对密度提取树干。
对于胸径估计,树干点云质量在不同环境下可能存在差异,而胸径估计方法是利用树干一定高度的点云来拟合一个圆或圆柱[11]、[17]、[18]、 [20],当躯干噪声较大时,可能会产生较低的精度。因此,我们提出了一种基于多高度直径的胸径估计方法。该方法采用RANSAC圆拟合法获取树干不同高度处的直径,并选择离群点检测方法检测并去除多高度直径处的离群点。去除异常值后,可通过多高直径计算出胸径值。该方法的流程图如图 3 所示。
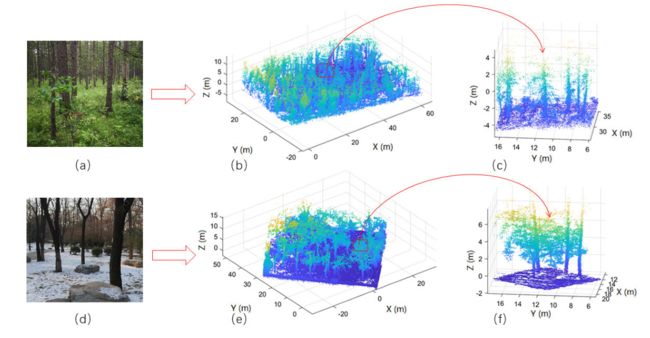
图 2. 森林图像和点云。 (a) 天然林地块形象; (b) 天然林样地的点云; © 天然林地块中树木的点云; (d) 城市森林地块的形象; (e) 城市森林地块的点云; (f) 城市森林地块中树木的点云。

图 3. 所提出方法的流程图。树胸径 (DBH)。随机样本共识(RANSAC)。
1) PRE-PROCESS
大多数天然林崎岖不平,地面倾斜,这意味着树木的底部不在同一水平面上,这可能会导致分割和胸径估计出现问题。本研究去除地面点云,并根据对应的地面点云将离地森林点云校正到相同高度。本研究选用布料模拟滤波(CSF)[26]去除地面点云,CSF基于布料模拟,是分离地面点云的常用方法。如图 4(a)和 4(b)所示,CSF 将地面点云与森林点云分开。
如图4(b)所示,地面点云有一个斜坡,因此,树的底部不在同一水平面上。地面点云生成的数字高程模型(DEM)如图4(c)所示,对于离地点云中的每个点云p=(xp,yp,zp),修正后的点云p0= (xp0, yp0, zp0) 可以通过以下等式计算:

其中 zpDEM 是 pDEM 的像素值,pDEM 是 DEM 中距离森林点 p 最近的像素。归一化后的离地点云如图4(d)所示。
2) RELATIVATE DENSITY SEGMENTATION METHOD
点云分割是从整个森林点云中分割出单棵树的点云,是胸径估计所必需的。以往学者采用层次聚类方法[14]对树木进行分割定位进行胸径估计,层次聚类方法得到点云在一定高度的横截面切片,通过聚类分析对切片进行分割。然而,与室内场景或道路场景不同,森林环境更为复杂。在茂密的森林中,灌木和树枝点云与树干点云相连,这可能会对单树分割产生影响,导致分割精度较低。我们提出了相对密度分割方法来分割树干并去除灌木和树枝。
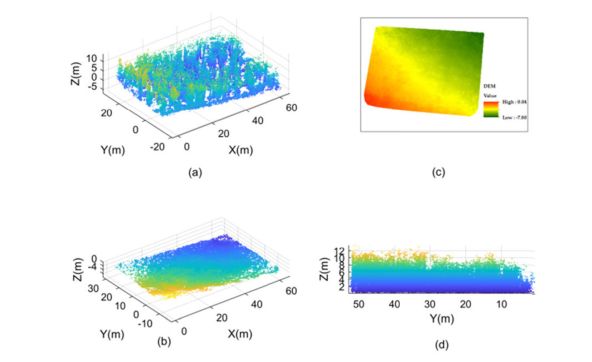
图 4. 地面点云移除和归一化。 (a) 离地点云; (b) 地面点云; © 地面点云生成的DEM; (d) 归一化后的离地点云。
点云密度可以用来提取树干,已有学者利用点云密度对滑坡、建筑物、森林等进行分割[27]、[28]。由于背包式LiDAR通过在森林中行走获取森林点云,树干点云投影到XOY平面后的密度会大于灌木和树枝。可以通过给点云密度值设置一个阈值来提取树干,也有一些学者使用基于点密度的准则来去除树干噪声点。然而,由于森林点云的不均匀性,点云密度与激光雷达传感器的距离有关,不同的点云密度会影响分割精度。
我们提出了一种相对密度分割方法,利用两个不同范围内的点数来计算不同尺度下投影到XOY平面上的点云密度,如图5(b)所示,相对密度可以通过两个不同尺度点云密度的比率。由于树干的相对密度高于周围环境,因此使用点云相对密度提取树干点云。最后采用点云分割方法将树干点云分割成单棵树。

图 5. 相对密度分割方法。 (a)归一化后的离地点云,(b)点云相对密度计算方法,©树干点云提取结果,(d)单树干。
如图 5 所示,对于归一化离地点云 P 中的点 p = (xp, yp, zp),投影距离 Dp = (d1, d2, . . . , dn) 为点p到其他点的XOY平面pi = (xpi, ypi, zpi) ∈ P, (1 ≤ i < n), n为点云P的点数。距离di可表示为:

如图 5(b)所示,我们设定两个不同尺度的距离值D1和D2,点p的相对密度值Rp可由下式计算:

其中 ND1 是 Dp 中小于 D1 的值的数量,ND2 是 Dp 中小于 D2 的值的数量。

D2大于D1,相对密度值Rp可以表示p点所在位置相对于周围的密度。通过给Rp设置一个阈值,可以提取树干点云Qtrunk。如图5©所示。
对于分割,如图5(c)所示,树干彼此分离,没有可能影响分割的树枝或灌木点云。因此,我们选择了欧氏聚类方法来分割树干点云。分段的单树干如图 5(d)所示。
3) DBH ESTIMATION METHOD BASED ON MULTI-HEIGHT DIAMETERS
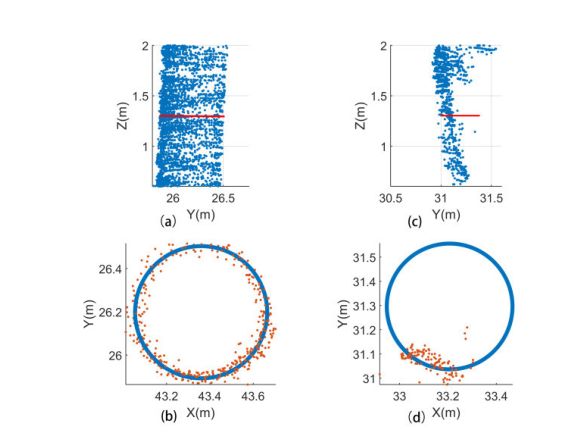
图 6. 树干点云圆拟合 1.3 m 高点云。(a)和(b)点云质量较好时点云在1.3 m处的圆拟合结果,6©和(d)树干点云时点云在1.3 m处的圆拟合结果有额外的噪音。
如图6(a)和6(b)所示,树干的横截面呈圆形,通过树干点云的圆拟合可以得到不同高度的树径。在大多数国家,树的胸径高度被定义为高出地面 1.3 米 [1]。因此,多数学者采用在 1.3 m 高度处对点云进行切片,投影到 XOY 平面上进行圆拟合来估算胸径 [14],[23]。但是MLS的大部分点云都带有噪声,分割后的树干点云可能会包含一些额外的树枝和灌木点云,这使得1.3 m处的点云圆拟合结果不准确。如图6©所示图6(d)为1.3 m高度点云切片圆拟合得到的树干直径与实测值相差较大。
该方法通过基于多高度点云的圆拟合算法获得多高度直径。本研究选择 RANSAC [29] 作为圆拟合方法。 RANSAC 是最常用的曲线拟合方法之一。这种方法可以消除半径对拟合的影响,在大曲率半径和一定噪声下也能正常工作。
多高度树干点云圆拟合结果如图 7所示,树干点云选取0.7 m~1.9 m,切片厚度为0.2 m,切片点云投影到XOY平面上用于圆拟合。通过中心高H=[0.7、0.9、1.1、1.3、1.5、1.7、1.9]的圆拟合得到7个直径D=(d1、d2、…、d7)。然而,如图 7© 和 7(d) 所示,某些高度的圆与实际直径有较大差异,这些被称为异常值。本研究使用 PauTa 标准 [30] 来检测和去除异常值。通过计算多高度树干直径和异常值,可以通过以下等式计算胸径:

其中E = (e1, e2, . . . , e7)为离群点的直径值,n为离群点的个数。对于 dk ∈ D,如果 ??dk − ¯D?? > 3σ , 则 dk 为异常值, ek = dk, (k ∈ [1, 7]), 如果 dk 不是异常值, ek = 0, 其中¯D 为 D 的平均值, σ 为D的标准偏差值。
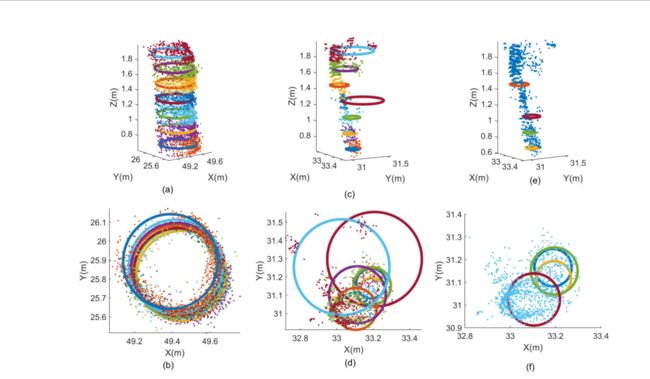
图 7. 与多高度树干点云相匹配的树干点云圆。 (a)和(b)点云质量好的时候多高度点云的圆拟合,©和(d)点云质量差的时候多高度点云的圆拟合, (e) 和 (f) 去除异常值后的多高度点云拟合圆。
对于质量较好且不属于树干的额外点云很少的树干点云,如图7(a)和7(b)所示,多高度直径中没有异常值,树DBH等于d4,表示树干在1.3m高处的直径。对于树干有很多不属于树干的额外点云,如图7(c),7(d)所示,d4,d6和d7的直径是异常值,如图所示. 7(e), 7(f),我们去除了离群值,可以通过其余直径的平均值计算胸径,以获得更接近参考胸径的值。
4) ACCURACY OF TREE SEGMENTATION AND DBH ESTIMATION
本研究选取precision和recall[31]作为点云分割方法的评价指标。Precision是指分割结果正确的比例,recall是指所有正确分割目标的比例,计算如下:

其中TP表示正确分割的树干点云,FP表示图中另一个错误分割成树干点云的点云,FN表示漏分的树干点云。
选取平均绝对误差(MAE)、平均绝对百分比误差(MAPE)和均方根误差(RMSE)作为DBH估计方法的评价指标,MAE用于衡量估计的DBH与dbhi之间的平均绝对误差。和实测胸径dbh0i,MAPE用于衡量估算胸径dbhi与实测胸径dbh0i的相对误差,RMSE用于衡量估算胸径dbhi与实测胸径dbh0i的平均二次偏差。它们的计算如下:

V. CONCLUSION
随着移动激光雷达扫描在林业中的广泛应用,获取树木的三维信息变得越来越方便。在本研究中,我们提出了一种基于背负式移动激光雷达系统的单树分割和胸径估计方法,并在天然林和城市森林条件下验证了所提方法的准确性和鲁棒性。针对单树点云分割,本研究提出了相对密度分割方法,有效降低了灌木和枝条对森林点云分割的影响,提高了点云分割精度。针对胸径估计,我们提出了一种基于多高度直径的胸径估计方法,该方法在点云数据质量较差的情况下仍能获得相对准确的估计结果。
在复杂的天然森林环境中,提出的分割方法的精度达到0.966,召回达到0.946。在城市森林环境中,所提出的分割方法的精度达到1.0,召回达到0.966。比较 MAE、MAPE 和 RMSE 结果,在相同的森林环境中,所提出的 DBH 估计方法结果优于比较方法。这项研究的结果证明了所提出方法的高精度和鲁棒性,以及背包移动 LiDAR 系统在复杂环境中进行森林清查的潜力。
论文链接
REFERENCES
