机器视觉:霍夫变换-理论与python实现
目录
- 前言
- 霍夫变换—直线原理
- 实现方法
- python实现
前言
这学期在学习机器视觉,课上讲到了霍夫变换,霍夫变换在图像处理和CV中很常用,借此十一假期仔细了解一下。
霍夫变换用来检测给定形状的曲线,其最开始是用来检测图像中的直线的,但经发展也可检测到圆等曲线。在目标检测中,如果不知图像中目标的位置而知道其轮廓的曲线方程,则可用霍夫变换进行检测。
霍夫变换—直线原理
在平面O-xy中,直线方程的基本形式为:y=ux+v。其中,u和v分别是直线的斜率和截距。对于一条确定的直线y=ux+v,它唯一地对应于平面O-uv中一个点(u,v);反之,对于平面O-uv中给定的一个点(u,v),它唯一地确定了平面O-xy中的一条直线。这种线到点的变换就是Hough变换。
同理,平面O-uv中的一条直线v=-xu+y与O-xy中的一个点(x,y)也是一一对应的。
对于给定直线上的任意三点(i,i) ,i = 1,2,3,其中,(,)和(,)所对应的平面O-uv中的两条直线为
可以算得这两条直线的交点为:
点(,)和(,)所对应的两条直线为:

它们的交点为:
由此可以推知:直线y=ux+v上各点所对应的O-uv中的各直线交于一点 (u0,v0)。利用这个重要特性可以检测共线点。注意到直线的斜率可能有近于无穷大的情况,直线方程不用截斜式而釆用极坐标形式:
![]()
霍夫逆变换,theta变成t,rho变成r了,没找到合适公式,将就看吧(==)
其中,ρ是直线到坐标系原点的距离;θ是直线法线与x轴的夹角。于是,直角坐标平面O-xy中的一直线和极坐标平面O-ρθ中的点一一对应,O-xy中的共线点与对应的O-ρθ中的曲线交于一点。下图的(a)和(b)表示O-xy中的直线和O-ρθ中的点对应关系——Hough变换: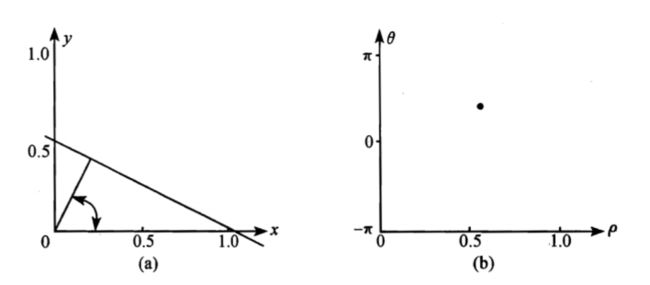
(c)和(d)表示O-xy中的点及共点线与O-ρθ中的曲线及曲线上点的对应关系:
(e)和(f)展示出了共线点所在直线对应于这些点在变换域中相应曲线的交点: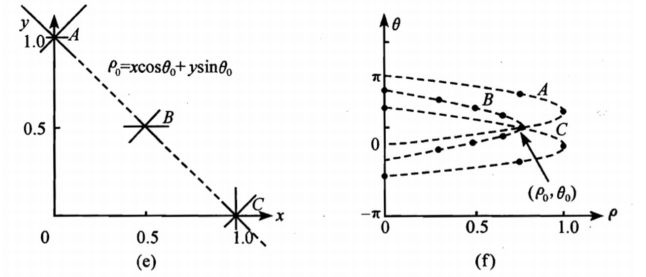
实现方法
根据精度要求将O-ρθ平面划分为等间隔的小直网格,这个直网格对应一个初始阵元为零的记数阵列。对于O-xy平面中的每一点,按上面介绍的原理在O-ρθ平面中画出它对应的曲线,凡是这条曲线所经过的小格,对应的计数阵列元素加1,通过同一小格的曲线所对应的点近乎共线,于是计数阵元的数值等于共线的点数。
有点难理解?翻译成人话就是:因为要把xy坐标系中的直线映射成ρθ坐标系中的点。 那就先反过来做,先在xy坐标系中找出图形所在的那些点,每个点都会在ρθ坐标系中映射成一条曲线(如图ef),如果这些点在xy坐标系中是共线的,那么它们在ρθ坐标系中映射的曲线是共点。如图e在直线中找出3点映射,则会在ρθ坐标系中映射成3条曲线,相交于一点。那么通过计数这个点经过的曲线个数,就可以知道在xy坐标系中有多少个点共线了。对应于大计数(数值很大)的小格,通过它的那些曲线在xy中对应的的点近乎共线,这里的(ρ,θ)可以作为拟合直线。
如果我们想检测图像中的直线,图像就是xy坐标系。在图像中实现检测有如下几个步骤:
- 通过canny等边缘检测算子找到图像中直线经过的像素点映射到ρθ坐标系(网格近似)中,获得一条曲线;
- 该曲线经过的像素点值+1;
- 重复步骤1和2,遍历整个图形;
- ρθ坐标系中每个元素中的数值代表图像共线的点数,数值较大的点可以作为拟合直线(ρ,θ);
- 霍夫逆变换求出原图直线
在选取网格时,若ρ,θ网格过小,即量化过细,虽然拟合直线的参数可以准确求出,但计算量加大了,且各组共线点数可能变少,因此要适当选取网格大小。
python实现
mport numpy as np
import cv2
from matplotlib import pyplot as plt
from collections import Counter
# 读取图像
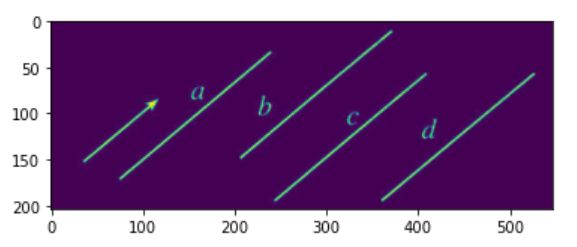
img = cv2.imread('line.png',2)
img = 255 - img print(img.shape) # [204,547]
# 正变换:将xy坐标系中的点映射到极坐标中,记录映射函数经过的每一点
def hough_forward_conver(x,y,points):
for t in range(0,360,2):
r = int(x * np.cos(np.pi*t/180) + y * np.sin(np.pi*t/180))
points.append([t,r]) # 直线经过的点放进去
return points
# 反变换:根据极坐标系的坐标求xy坐标系的坐标
def hough_reverse_conver(y, t,r):
x = int(- y * (np.sin(np.pi*t/180) / (np.cos(np.pi*t/180)+ 1e-4)) + r / (np.cos(np.pi*t/180)+1e-4))
return x
# 霍夫正变换
points = [] # 存放变换后的直线经过的点
px, py = np.where(img == 255) # 检测出直线上的点
for x,y in zip(px,py):
points = hough_forward_conver(x,y,points) # 霍夫变换,xy--->theta,rho
print(len(points))
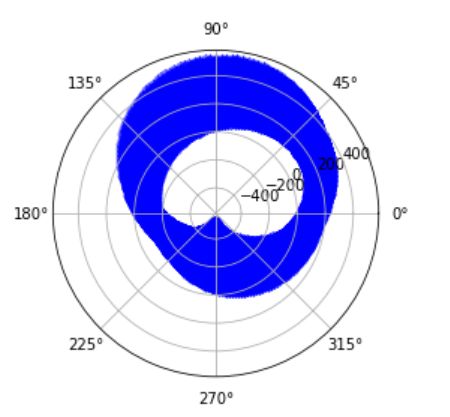
# 画极坐标图
points = np.array(points)
theta, rho = points[:,0], points[:,1]
ax = plt.subplot(111, projection='polar')
ax.scatter(np.pi*theta/180, rho, c='b', alpha=0.5,linewidths=0.01)
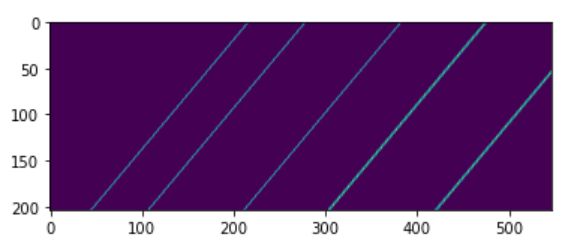
# 霍夫空间的网格坐标系
hough_space = np.zeros([360, 3000])
for point in points:
t, r = point[0], point[1] + 1000 # r可能为负,防止索引溢出 h
ough_space[t,r] += 1
# 找出直线所在的点
line_points = np.where(hough_space >= 15)
print(len(line_points[0]))
# 霍夫逆变换求xy
mask = np.zeros_like(img)
for t,r in zip(line_points[0],line_points[1]):
for y in range(img.shape[0]):
x = hough_reverse_conver(y, t,r-1000)
if x in range(1,img.shape[1]):
mask[y,x] += 1
plt.imshow(mask)
plt.imshow(img)
原图: