OpenCV(C++版本)基础相关(6):图像的旋转、视频文件摄像头使用、视频处理与保存、图像的直方图、二维直方图
文章目录
- 二十一、图像的旋转
-
- 21.1 quickopencv.h
- 21.2 QuickDemo.cpp
- 21.3 test.cpp
- 二十二、视频文件摄像头使用
-
- 22.1 quickopencv.h
- 22.2 QuickDemo.cpp
- 22.3 test.cpp
- 二十三、视频处理与保存
-
- 23.1 quickopencv.h
- 23.2 QuickDemo.cpp
- 23.3 test.cpp
- 二十四、图像的直方图
-
- 24.1 quickopencv.h
- 24.2 QuickDemo.cpp
- 24.3 test.cpp
- 二十五、二维直方图
-
- 25.1 quickopencv.h
- 25.2 QuickDemo.cpp
- 25.3 test.cpp
知识来源:哔哩哔哩。以下内容仅为学习笔记,不做其他用途。
二十一、图像的旋转
知识点:
- M =
getRotationMatrix2D(Point(w / 2, h / 2), 45, 1.0);//第一个参数表示center:旋转中心坐标,是一个元组参数(col, row);第二个参数表示angle:旋转角度,旋转方向,负号为逆时针,正号为顺时针;第三个参数表示scale:旋转后图像相比原来的缩放比例,1为等比例缩放。 warpAffine(image, dst, M, Size(nw, nh), INTER_LINEAR, 0, Scalar(0, 0, 255));//image表示输入图像;dst为输出图像;M表示矩阵变换关系,通常是平移或者旋转;Size(nw, nh)输出图像的尺寸;INTER_LINEAR表示线性插值;0表示边界像素模式;Scalar(0, 0, 255)表示颜色。
21.1 quickopencv.h
#include21.2 QuickDemo.cpp
#include21.3 test.cpp
#include
二十二、视频文件摄像头使用
知识点:
VideoCapture capture(“D:/opencv/pictures/1234.mp4”); //读取视频的地址capture.read(frame); //读取视频capture.release();//释放资源
22.1 quickopencv.h
#include22.2 QuickDemo.cpp
#include22.3 test.cpp
#include
二十三、视频处理与保存
知识点:
- int frame_width =
capture.get(CAP_PROP_FRAME_WIDTH);//获取视频宽 - int frame_height =
capture.get(CAP_PROP_FRAME_HEIGHT);//获取视频高 - int count =
capture.get(CAP_PROP_FRAME_COUNT);//获取视频总帧数 - double fps =
capture.get(CAP_PROP_FPS);//获取视频的FPS VideoWriter writer("D:/opencv/pictures//test.mp4", capture.get(CAP_PROP_FOURCC), fps, Size(frame_width, frame_height), true);//保存视频。参数1输出文件名;参数2编码形式;参数3输出帧率;参数4输出尺寸;参数5如果为False,可以传入灰度图片。
23.1 quickopencv.h
#include23.2 QuickDemo.cpp
#include23.3 test.cpp
#include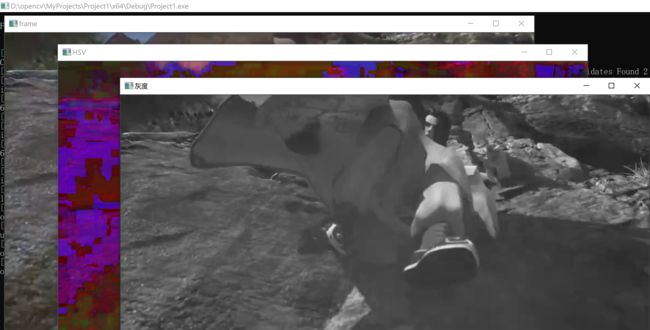
二十四、图像的直方图
知识点:
calcHist(&bgr_plane[0], 1, 0, Mat(), b_hist, 1, bins, ranges);//参数分别为:源图像矩阵;源图像数量;源图像通道;掩膜;直方图输出值;输出直方图的维度;统计像素值的区间;等。
24.1 quickopencv.h
#include24.2 QuickDemo.cpp
#include24.3 test.cpp
#include
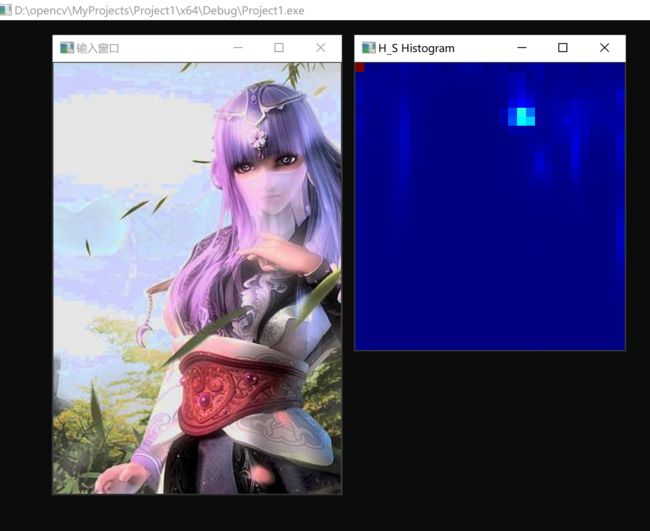
二十五、二维直方图
知识点:
applyColorMap(hist2d_image,hist2d_image,COLORMAP_JET);//参数分别为:源图像;输出图像;可提供色彩代码值。
25.1 quickopencv.h
#include25.2 QuickDemo.cpp
#include25.3 test.cpp
#include