Linux驱动_多点电容触摸
一丶Linux下多点电容触摸驱动框架
① 电容触摸屏IC是FT5426,为IIC协议芯片,因此需要编写IIC驱动
② 触摸IC会发出中断信号,并在中断服务函数中上报信息,因此需要编写中断框架
③ 触摸屏向Linux内核上报的信息都属于Input子系统,因此需要编写Input子系统
④ 上报的信息需要满足Input子系统的多点电容触摸协议
二、多点电容触摸协议
在Documentation/input/multitouch-protocol.txt。
MT协议主要是分为2种type A和type B。
type B适用于有硬件追踪并能区分触摸点的触摸设备,此类型设备通过slot更新某一个触摸点的信息, FT5426就属于此类型。
在中断函数中我们需要将触摸点的信息上报给Linux内核,在协议文档中介绍了,触摸点的信息通过ABS_MT事件上传给内核的。
相关事件的宏定义如下:
#define ABS_MT_SLOT 0x2f /* MT slot being modified */
#define ABS_MT_TOUCH_MAJOR 0x30 /* Major axis of touching ellipse */
#define ABS_MT_TOUCH_MINOR 0x31 /* Minor axis (omit if circular) */
#define ABS_MT_WIDTH_MAJOR 0x32 /* Major axis of approaching ellipse */
#define ABS_MT_WIDTH_MINOR 0x33 /* Minor axis (omit if circular) */
#define ABS_MT_ORIENTATION 0x34 /* Ellipse orientation */
#define ABS_MT_POSITION_X 0x35 /* Center X touch position */
#define ABS_MT_POSITION_Y 0x36 /* Center Y touch position */
#define ABS_MT_TOOL_TYPE 0x37 /* Type of touching device */
#define ABS_MT_BLOB_ID 0x38 /* Group a set of packets as a blob */
#define ABS_MT_TRACKING_ID 0x39 /* Unique ID of initiated contact */
#define ABS_MT_PRESSURE 0x3a /* Pressure on contact area */
#define ABS_MT_DISTANCE 0x3b /* Contact hover distance */
#define ABS_MT_TOOL_X 0x3c /* Center X tool position */
#define ABS_MT_TOOL_Y 0x3d /* Center Y tool position */从名称中我们不难看出, ABS_MT_POSITION_X 和ABS_MT_POSITION_Y 表示触摸点的X、Y坐标。ABS_MT_SLOT 用来上报触摸点的ID,除此之外,对于我们使用的满足type B类型的IC芯片,还需要使用ABS_MT_TRACKING_ID 关联每一个SLOT信息。
总结来说:对于FT5426芯片的电容屏,上传一个点的信息需要包括四个参数:
ABS_MT_SLOT //通过input_mt_report_slot_state 函数
ABS_MT_POSITION_X
ABS_MT_POSITION_Y //通过input_report_abs 函数
ABS_MT_TRACKING_ID //通过input_mt_report_slot_state 函数
三、 多点触摸使用的API函数
1、 input_mt_init_slots 函数
int input_mt_init_slots( struct input_dev *dev,
unsigned int num_sl
unsigned int flags)函数参数和返回值含义如下:
dev: MT 设备对应的 input_dev。
num_slots:设备要使用的 SLOT 数量,也就是触摸点的数量。
flags: 其他一些 flags 信息,可设置的 flags 如下所示:
2、 input_mt_slot 函数
void input_mt_slot(struct input_dev *dev,
int slot)函数参数和返回值含义如下:
dev: MT 设备对应的 input_dev。
slot:当前发送的是哪个 slot 的坐标信息,也就是哪个触摸点。
返回值:无。
3、 input_mt_report_slot_state 函数
void input_mt_report_slot_state( struct input_dev *dev,
unsigned int tool_type,
bool active) 函数参数和返回值含义如下:
dev: MT 设备对应的 input_dev。
tool_type:触摸类型,可以选择 MT_TOOL_FINGER(手指)、 MT_TOOL_PEN(笔)或MT_TOOL_PALM(手掌),对于多点电容触摸屏来说一般都是手指。
active: true,连续触摸, input 子系统内核会自动分配一个 ABS_MT_TRACKING_ID 给 slot。
false,触摸点抬起,表示某个触摸点无效了, input 子系统内核会分配一个-1 给 slot,表示触摸点溢出。
返回值:无。
4、 input_report_abs 函数
void input_report_abs( struct input_dev *dev,
unsigned int code,
int value)函数参数和返回值含义如下:
dev: MT 设备对应的 input_dev。
code:要上报的是什么数据,可以设置为 ABS_MT_POSITION_X 或 ABS_MT_POSITION_Y,也就是 X 轴或者 Y 轴坐标数据。
value: 具体的 X 轴或 Y 轴坐标数据值。
返回值:无。
四、搭建驱动框架
前面介绍了本次驱动需要搭载IIC驱动和中断驱动框架,搭建完毕如下所示:
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
struct ft5x06_dev {
struct device_node *nd; //设备节点
int irq_pin,reset_pin; //中断引脚,复位引脚
int irq_num; //中断号
void *private_data;
struct i2c_client *client; //i2c设备
};
static struct ft5x06_dev ft5x06;
static int ft5x06_read_regs(struct ft5x06_dev *dev, u8 reg, void *val, int len)
{
int ret;
struct i2c_msg msg[2];
struct i2c_client *client = (struct i2c_client *)dev->client;
/* msg[0]为发送要读取的首地址 */
msg[0].addr = client->addr; /* ft5x06地址 */
msg[0].flags = 0; /* 标记为发送数据 */
msg[0].buf = ® /* 读取的首地址 */
msg[0].len = 1; /* reg长度*/
/* msg[1]读取数据 */
msg[1].addr = client->addr; /* ft5x06地址 */
msg[1].flags = I2C_M_RD; /* 标记为读取数据*/
msg[1].buf = val; /* 读取数据缓冲区 */
msg[1].len = len; /* 要读取的数据长度*/
ret = i2c_transfer(client->adapter, msg, 2);
if(ret == 2) {
ret = 0;
} else {
ret = -EREMOTEIO;
}
return ret;
}
static s32 ft5x06_write_regs(struct ft5x06_dev *dev, u8 reg, u8 *buf, u8 len)
{
u8 b[256];
struct i2c_msg msg;
struct i2c_client *client = (struct i2c_client *)dev->client;
b[0] = reg; /* 寄存器首地址 */
memcpy(&b[1],buf,len); /* 将要写入的数据拷贝到数组b里面 */
msg.addr = client->addr; /* ft5x06地址 */
msg.flags = 0; /* 标记为写数据 */
msg.buf = b; /* 要写入的数据缓冲区 */
msg.len = len + 1; /* 要写入的数据长度 */
return i2c_transfer(client->adapter, &msg, 1);
}
static void ft5x06_write_reg(struct ft5x06_dev *dev, u8 reg, u8 data)
{
u8 buf = 0;
buf = data;
ft5x06_write_regs(dev, reg, &buf, 1);
}
/*复位FT5X06*/
static int ft5x06_ts_reset(struct i2c_client *client, struct ft5x06_dev *dev)
{
int ret = 0;
if (gpio_is_valid(dev->reset_pin)) { /* 检查IO是否有效 */
/* 申请复位IO,并且默认输出低电平 */
ret = devm_gpio_request_one(&client->dev,
dev->reset_pin, GPIOF_OUT_INIT_LOW,
"edt-ft5x06 reset");
if (ret) {
return ret;
}
msleep(5);
gpio_set_value(dev->reset_pin, 1); /* 输出高电平,停止复位 */
msleep(300);
}
return 0;
}
/*中断处理函数*/
static irqreturn_t ft5x06_handler(int irq, void *dev_id)
{
printk("ft5x06_handler\r\n");
return IRQ_HANDLED;
}
static int ft5x06_ts_irq(struct i2c_client *client, struct ft5x06_dev *dev)
{
int ret = 0;
/* 1,申请中断GPIO */
if (gpio_is_valid(dev->irq_pin)) {
ret = devm_gpio_request_one(&client->dev, dev->irq_pin,
GPIOF_IN, "edt-ft5x06 irq");
if (ret) {
dev_err(&client->dev,
"Failed to request GPIO %d, error %d\n",
dev->irq_pin, ret);
return ret;
}
}
/* 2,申请中断,client->irq就是IO中断, */
ret = devm_request_threaded_irq(&client->dev, client->irq, NULL,
ft5x06_handler, IRQF_TRIGGER_FALLING | IRQF_ONESHOT,
client->name, &ft5x06);
if (ret) {
dev_err(&client->dev, "Unable to request touchscreen IRQ.\n");
return ret;
}
return 0;
}
static int ft5x06_ts_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
int ret = 0;
printk("ft5426 init\n");
ft5x06.client = client; //保存i2c分配的client信息
/*从设备树获取信息*/
ft5x06.irq_pin = of_get_named_gpio(client->dev.of_node, "interrupt-gpios", 0);
ft5x06.reset_pin = of_get_named_gpio(client->dev.of_node, "reset-gpios", 0);
ft5x06_ts_reset(ft5x06.client, &ft5x06);
ft5x06_ts_irq(ft5x06.client, &ft5x06);
return 0;
}
static int ft5x06_ts_remove(struct i2c_client *client)
{
printk("ft5426 exit\n");
return 0;
}
/*
* 传统驱动匹配表
*/
static const struct i2c_device_id ft5x06_ts_id[] = {
{ "edt-ft5426", 0, },
{ /* sentinel */ }
};
/*
* 设备树匹配表
*/
static const struct of_device_id ft5x06_of_match[] = {
{ .compatible = "edt,edt-ft5426", },
{ /* sentinel */ }
};
/* i2c驱动结构体 */
static struct i2c_driver ft5x06_ts_driver = {
.driver = {
.owner = THIS_MODULE,
.name = "edt_ft5x06",
.of_match_table = of_match_ptr(ft5x06_of_match),
},
.id_table = ft5x06_ts_id,
.probe = ft5x06_ts_probe,
.remove = ft5x06_ts_remove,
};
static int __init ft5x06_init(void)
{
int ret = 0;
ret = i2c_add_driver(&ft5x06_ts_driver);
return ret;
}
static void __exit ft5x06_exit(void)
{
i2c_del_driver(&ft5x06_ts_driver);
}
module_init(ft5x06_init);
module_exit(ft5x06_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("ZYC");
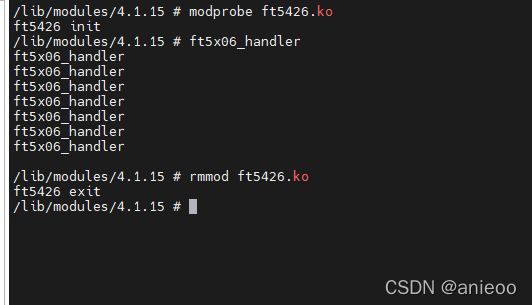
在驱动框架中利用设备树匹配的方式,完成了IIC设备的申请,触摸IC复位引脚和中断引脚的申请,并且申请方式为devm_gpio_request_one,通过此方式申请的IO不需要自己释放,由系统释放。
现在加载驱动以后,触碰屏幕就会触发中断处理函数。验证如下:
五、 完善多点电容触摸驱动
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#define MAX_SUPPORT_POINTS 5 /* 5点触摸 */
#define TOUCH_EVENT_DOWN 0x00 /* 按下 */
#define TOUCH_EVENT_UP 0x01 /* 抬起 */
#define TOUCH_EVENT_ON 0x02 /* 接触 */
#define TOUCH_EVENT_RESERVED 0x03 /* 保留 */
/* FT5X06寄存器相关宏定义 */
#define FT5X06_TD_STATUS_REG 0X02 /* 状态寄存器地址 */
#define FT5x06_DEVICE_MODE_REG 0X00 /* 模式寄存器 */
#define FT5426_IDG_MODE_REG 0XA4 /* 中断模式 */
#define FT5X06_READLEN 29 /* 要读取的寄存器个数 */
struct ft5x06_dev {
struct device_node *nd; //设备节点
int irq_pin,reset_pin; //中断引脚,复位引脚
int irq_num; //中断号
void *private_data;
struct i2c_client *client; //i2c设备
struct input_dev *input; //input设备
};
static struct ft5x06_dev ft5x06;
static int ft5x06_read_regs(struct ft5x06_dev *dev, u8 reg, void *val, int len)
{
int ret;
struct i2c_msg msg[2];
struct i2c_client *client = (struct i2c_client *)dev->client;
/* msg[0]为发送要读取的首地址 */
msg[0].addr = client->addr; /* ft5x06地址 */
msg[0].flags = 0; /* 标记为发送数据 */
msg[0].buf = ® /* 读取的首地址 */
msg[0].len = 1; /* reg长度*/
/* msg[1]读取数据 */
msg[1].addr = client->addr; /* ft5x06地址 */
msg[1].flags = I2C_M_RD; /* 标记为读取数据*/
msg[1].buf = val; /* 读取数据缓冲区 */
msg[1].len = len; /* 要读取的数据长度*/
ret = i2c_transfer(client->adapter, msg, 2);
if(ret == 2) {
ret = 0;
} else {
ret = -EREMOTEIO;
}
return ret;
}
static s32 ft5x06_write_regs(struct ft5x06_dev *dev, u8 reg, u8 *buf, u8 len)
{
u8 b[256];
struct i2c_msg msg;
struct i2c_client *client = (struct i2c_client *)dev->client;
b[0] = reg; /* 寄存器首地址 */
memcpy(&b[1],buf,len); /* 将要写入的数据拷贝到数组b里面 */
msg.addr = client->addr; /* ft5x06地址 */
msg.flags = 0; /* 标记为写数据 */
msg.buf = b; /* 要写入的数据缓冲区 */
msg.len = len + 1; /* 要写入的数据长度 */
return i2c_transfer(client->adapter, &msg, 1);
}
static void ft5x06_write_reg(struct ft5x06_dev *dev, u8 reg, u8 data)
{
u8 buf = 0;
buf = data;
ft5x06_write_regs(dev, reg, &buf, 1);
}
/*复位FT5X06*/
static int ft5x06_ts_reset(struct i2c_client *client, struct ft5x06_dev *dev)
{
int ret = 0;
if (gpio_is_valid(dev->reset_pin)) { /* 检查IO是否有效 */
/* 申请复位IO,并且默认输出低电平 */
ret = devm_gpio_request_one(&client->dev,
dev->reset_pin, GPIOF_OUT_INIT_LOW,
"edt-ft5x06 reset");
if (ret) {
return ret;
}
msleep(5);
gpio_set_value(dev->reset_pin, 1); /* 输出高电平,停止复位 */
msleep(300);
}
return 0;
}
static irqreturn_t ft5x06_handler(int irq, void *dev_id)
{
struct ft5x06_dev *multidata = dev_id;
u8 rdbuf[29];
int i, type, x, y, id;
int offset, tplen;
int ret;
bool down;
offset = 1; /* 偏移1,也就是0X02+1=0x03,从0X03开始是触摸值 */
tplen = 6; /* 一个触摸点有6个寄存器来保存触摸值 */
memset(rdbuf, 0, sizeof(rdbuf)); /* 清除 */
/* 读取FT5X06触摸点坐标从0X02寄存器开始,连续读取29个寄存器 */
ret = ft5x06_read_regs(multidata, FT5X06_TD_STATUS_REG, rdbuf, FT5X06_READLEN);
if (ret) {
goto fail;
}
/* 上报每一个触摸点坐标 */
for (i = 0; i < MAX_SUPPORT_POINTS; i++) {
u8 *buf = &rdbuf[i * tplen + offset];
/* 以第一个触摸点为例,寄存器TOUCH1_XH(地址0X03),各位描述如下:
* bit7:6 Event flag 0:按下 1:释放 2:接触 3:没有事件
* bit5:4 保留
* bit3:0 X轴触摸点的11~8位。
*/
type = buf[0] >> 6; /* 获取触摸类型 */
if (type == TOUCH_EVENT_RESERVED)
continue;
/* 我们所使用的触摸屏和FT5X06是反过来的 */
x = ((buf[2] << 8) | buf[3]) & 0x0fff;
y = ((buf[0] << 8) | buf[1]) & 0x0fff;
/* 以第一个触摸点为例,寄存器TOUCH1_YH(地址0X05),各位描述如下:
* bit7:4 Touch ID 触摸ID,表示是哪个触摸点
* bit3:0 Y轴触摸点的11~8位。
*/
id = (buf[2] >> 4) & 0x0f;
down = type != TOUCH_EVENT_UP;
input_mt_slot(multidata->input, id);
input_mt_report_slot_state(multidata->input, MT_TOOL_FINGER, down);
if (!down)
continue;
input_report_abs(multidata->input, ABS_MT_POSITION_X, x);
input_report_abs(multidata->input, ABS_MT_POSITION_Y, y);
}
input_mt_report_pointer_emulation(multidata->input, true);
input_sync(multidata->input);
fail:
return IRQ_HANDLED;
}
static int ft5x06_ts_irq(struct i2c_client *client, struct ft5x06_dev *dev)
{
int ret = 0;
/* 1,申请中断GPIO */
if (gpio_is_valid(dev->irq_pin)) {
ret = devm_gpio_request_one(&client->dev, dev->irq_pin,
GPIOF_IN, "edt-ft5x06 irq");
if (ret) {
dev_err(&client->dev,
"Failed to request GPIO %d, error %d\n",
dev->irq_pin, ret);
return ret;
}
}
/* 2,申请中断,client->irq就是IO中断, */
ret = devm_request_threaded_irq(&client->dev, client->irq, NULL,
ft5x06_handler, IRQF_TRIGGER_FALLING | IRQF_ONESHOT,
client->name, &ft5x06);
if (ret) {
dev_err(&client->dev, "Unable to request touchscreen IRQ.\n");
return ret;
}
return 0;
}
static int ft5x06_ts_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
int ret = 0;
printk("ft5426 init\n");
ft5x06.client = client; //保存i2c分配的client信息
/*从设备树获取信息*/
ft5x06.irq_pin = of_get_named_gpio(client->dev.of_node, "interrupt-gpios", 0);
ft5x06.reset_pin = of_get_named_gpio(client->dev.of_node, "reset-gpios", 0);
ft5x06_ts_reset(ft5x06.client, &ft5x06);
ft5x06_ts_irq(ft5x06.client, &ft5x06);
/* 4,初始化FT5X06 */
ft5x06_write_reg(&ft5x06, FT5x06_DEVICE_MODE_REG, 0); /* 进入正常模式 */
ft5x06_write_reg(&ft5x06, FT5426_IDG_MODE_REG, 1); /* FT5426中断模式 */
/* 5,input设备注册 */
ft5x06.input = devm_input_allocate_device(&client->dev);
if (!ft5x06.input) {
ret = -ENOMEM;
goto fail;
}
ft5x06.input->name = client->name;
ft5x06.input->id.bustype = BUS_I2C;
ft5x06.input->dev.parent = &client->dev;
__set_bit(EV_KEY, ft5x06.input->evbit);
__set_bit(EV_ABS, ft5x06.input->evbit);
__set_bit(BTN_TOUCH, ft5x06.input->keybit);
input_set_abs_params(ft5x06.input, ABS_X, 0, 1024, 0, 0);
input_set_abs_params(ft5x06.input, ABS_Y, 0, 600, 0, 0);
input_set_abs_params(ft5x06.input, ABS_MT_POSITION_X,0, 1024, 0, 0);
input_set_abs_params(ft5x06.input, ABS_MT_POSITION_Y,0, 600, 0, 0);
ret = input_mt_init_slots( ft5x06.input, MAX_SUPPORT_POINTS, 0); //初始化slot信息槽
if (ret) {
goto fail;
}
ret = input_register_device(ft5x06.input);
if (ret)
goto fail;
return 0;
fail:
return ret;
}
static int ft5x06_ts_remove(struct i2c_client *client)
{
printk("ft5426 exit\n");
return 0;
}
/*
* 传统驱动匹配表
*/
static const struct i2c_device_id ft5x06_ts_id[] = {
{ "edt-ft5426", 0, },
{ /* sentinel */ }
};
/*
* 设备树匹配表
*/
static const struct of_device_id ft5x06_of_match[] = {
{ .compatible = "edt,edt-ft5426", },
{ /* sentinel */ }
};
/* i2c驱动结构体 */
static struct i2c_driver ft5x06_ts_driver = {
.driver = {
.owner = THIS_MODULE,
.name = "edt_ft5x06",
.of_match_table = of_match_ptr(ft5x06_of_match),
},
.id_table = ft5x06_ts_id,
.probe = ft5x06_ts_probe,
.remove = ft5x06_ts_remove,
};
static int __init ft5x06_init(void)
{
int ret = 0;
ret = i2c_add_driver(&ft5x06_ts_driver);
return ret;
}
static void __exit ft5x06_exit(void)
{
i2c_del_driver(&ft5x06_ts_driver);
}
module_init(ft5x06_init);
module_exit(ft5x06_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("ZYC");