计算机网络(三)——TCP套接字编程
文章目录
- 一、TCP常用接口函数
-
- 2.1 设置监听套接字
- 2.2 accept获取连接
- 2.3 connect发起连接
- 2.4 流读取
- 二、TCP通信
-
- 2.1 服务端
- 2.2 客户端
- 2.3 不断优化的服务端
-
- 2.3.1 多进程版本
- 2.3.2 多线程版本
- 2.3.3 线程池版本
一、TCP常用接口函数
TCP是面向连接的,需要两端建立链接才能通信。
客户端主动连接,申请服务。
服务端被动连接,提供服务。
需要给用户一个建立连接的功能。所以就要创建两个套接字
- 监听套接字,用于连接需求
- 提供服务的套接字,建立连接后提供服务
2.1 设置监听套接字
设置套接字是listen状态,本质就是允许用户连接。
#include 2.2 accept获取连接
接受请求,并返回一个新的套接字用于提供服务。
#include 2.3 connect发起连接
用于向服务端发起连接
#include 2.4 流读取
TCP通信是通过文件流传递的,所以可以使用read/write等系统文件流调用接口读取通信的数据。但也有两个专门用于读取网络通信流的接口函数。 可以根据对流的读取结果俩判断客户端是否退出。
#include #include udp中的recvfrom和sendto是用于无连接通信,在有连接的tcp通信中,一般采用recv和send。
inet_ntoa()函数将以网络字节顺序给出的 Internet 主机地址转换为 IPv4 点分十进制表示法的字符串。
char *inet_ntoa(struct in_addr in);
二、TCP通信
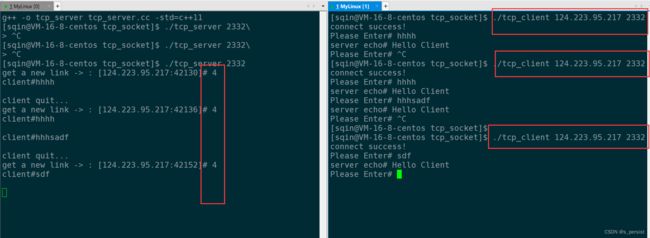
2.1 服务端
#include 2.2 客户端
#include 当没有关闭文件描述符的时候,不断增加

关闭之后每次都从4开始
2.3 不断优化的服务端
2.3.1 多进程版本
只需要修改调用服务函数的地方即可。
多进程也有两种实现方式
- 父进程忽略子进程退出的信号,自动释放子进程资源,这样就不用影响父进程处理下一个客户
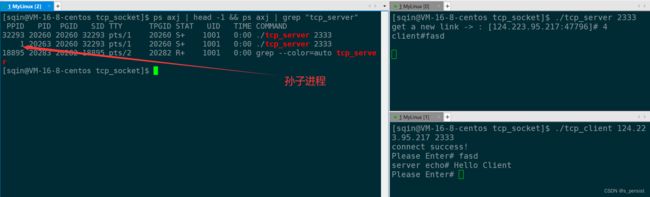
- 子进程再创建子进程(孙子进程)来处理,然后子进程退出,孙子进程执行服务,此时孙子进程为孤儿进程由操作系统管理
版本1
signal(SIGCHLD, SIG_IGN); // 显示设置忽略17号信号,当进程退出后,自动释放僵尸进程
// 多进程处理通信
pid_t pid = fork();
if (pid < 0)
{
continue;
}
else if (pid == 0)
{
// 由于子进程会拷贝父进程的文件描述符,但是子进程只用来处理服务
// 所以要关闭继承下来的监听文件描述符
close(listen_sock);
ServiceIO(new_sock);
close(new_sock);
exit(0);
}
else
{
// 父进程,不能等待子进程,否则就成了单执行流
close(new_sock);
}
版本2
// 多进程处理通信
pid_t pid = fork();
if (pid < 0)
{
continue;
}
else if (pid == 0)
{
// 由于子进程会拷贝父进程的文件描述符,但是子进程只用来处理服务
// 所以要关闭继承下来的监听文件描述符
close(listen_sock);
if (fork() > 0)
exit(0); // 退出,由孙子进程执行
ServiceIO(new_sock);
close(new_sock);
exit(0);
}
else
{
// 1. 父进程,不能等待子进程,否则就成了单执行流
// 2. 父进程等待子进程,由孙子进程执行服务
waitpid(pid, nullptr, 0); //阻塞等待,但很快
close(new_sock);
}
2.3.2 多线程版本
void* HandlerRequest(void* args)
{
// 分离线程
pthread_detach(pthread_self());
int sock = *(int*)args;
delete (int*)args;
ServiceIO(sock);
close(sock);
}
// 多线程版本
pthread_t tid;
int* pram = new int(new_sock);
pthread_create(&tid, nullptr, HandlerRequest, pram);
2.3.3 线程池版本
服用之前写的线程池,然后将服务函数封装在类里面,传入线程池处理即可
//1. 构建一个任务
Task t(new_sock);
//2. 将任务push到后端的线程池即可
ThreadPool<Task>::GetInstance()->PushTask(t); // 单例模式下的线程池
task.cc // 服务函数
#pragma once
#include