MPC多旋翼控制 - 线性MPC代码解读(mav_control_rw项目)
MPC无人机控制 - mav_control_rw项目 - 线性MPC代码解读
大型工程的代码还是得记录一下,不然每次都得回头看。紧接上篇趁热打铁一下
MPC多旋翼控制 - mav_control_rw项目
目录
- MPC无人机控制 - mav_control_rw项目 - 线性MPC代码解读
- 一. 代码构成
- 二. mav_linear_mpc模块
一. 代码构成
├── mav_control_rw
│ ├── LICENSE
│ ├── mav_control_interface
│ ├── mav_disturbance_observer
│ ├── mav_linear_mpc
│ ├── mav_lowlevel_attitude_controller
│ ├── mav_nonlinear_mpc
│ └── README.md
git上克隆下来后就是这些文件夹。
1. mav_control_interface
主要用于将mpc生成的控制指令传给飞控,接收mpc生成的输入序列,还有rc方面的一些回调函数,这里先不展开。
2. mav_disturbance_observer
实现扰动观测器,以考虑扰动。
3. mav_linear_mpc/mav_nonlinear_mpc
分别是线性mpc控制器和非线性mpc控制器,是主要的算法模块,本篇主要解读线性mpc控制器代码,非线性结构与线性结构类似,只是无人机模型是非线性的。
4. mav_lowlevel_attitude_controller
由high level control command到low level control command的转换,有点类似于飞控做的工作,不过由于不是论文的工作范围,所以就不看了。
二. mav_linear_mpc模块
src中有三个文件:linear_mpc.cpp,linear_mpc_node.cpp,steady_state_calculation.cpp。ROS启动的节点只有linear_mpc_node。那首先看看linear_mpc_node.cpp。

看一下main函数
int main(int argc, char** argv)
{
//初始化ros
ros::init(argc, argv, "LinearModelPredictiveControllerNode");
//初始化节点
ros::NodeHandle nh, private_nh("~");
//构造LinearModelPredictiveControllerNode类
std::shared_ptr<mav_control::LinearModelPredictiveControllerNode> mpc(
new mav_control::LinearModelPredictiveControllerNode(nh, private_nh));
//构造RcInterfaceAci类
std::shared_ptr<mav_control_interface::RcInterfaceAci> rc(
new mav_control_interface::RcInterfaceAci(nh));
//构造MavControlInterface类
mav_control_interface::MavControlInterface control_interface(nh, private_nh, mpc, rc);
//等待消息
ros::spin();
return 0;
}
可以看到没有什么操作,都是初始化,所以需要去类的构造函数里看。先看看LinearModelPredictiveControllerNode类。
LinearModelPredictiveControllerNode::LinearModelPredictiveControllerNode(
const ros::NodeHandle& nh, const ros::NodeHandle& private_nh)
: linear_mpc_(nh, private_nh),
dyn_config_server_(private_nh)
{
dynamic_reconfigure::Server<mav_linear_mpc::LinearMPCConfig>::CallbackType f;
f = boost::bind(&LinearModelPredictiveControllerNode::DynConfigCallback, this, _1, _2);
dyn_config_server_.setCallback(f);
}
构造函数首先初始化了linear_mpc_和dyn_config_server_。linear_mpc_是一个LinearModelPredictiveController类,此处就跟linear_mpc.cpp连接起来了,dyn_config_server_是一个dynamic_reconfigure::Server类,这个类没怎么看,不过看名称主要是参数设置相关的,现阶段不是太需要关注,函数主体也是定义了一个类f,用于参数动态设置。前面提到了linear_mpc_,这是个LinearModelPredictiveController类,也就是src文件夹中另一个文件写的类。函数主体部分就是动态调参相关。下面直接去看LinearModelPredictiveController类。
LinearModelPredictiveController::LinearModelPredictiveController(const ros::NodeHandle& nh,
const ros::NodeHandle& private_nh)
: nh_(nh),
private_nh_(private_nh),
initialized_parameters_(false),
position_error_integration_(0, 0, 0),
command_roll_pitch_yaw_thrust_(0, 0, 0, 0),
linearized_command_roll_pitch_thrust_(0, 0, 0),
mpc_queue_(nh, private_nh, kPredictionHorizonSteps),
disturbance_observer_(nh, private_nh),
verbose_(false),
solve_time_average_(0),
steady_state_calculation_(nh, private_nh),
received_first_odometry_(false)
{
reset_integrator_service_server_ = nh_.advertiseService(
"reset_integrator", &LinearModelPredictiveController::resetIntegratorServiceCallback, this);
initializeParameters();
mpc_queue_.initializeQueue(sampling_time_, prediction_sampling_time_);
}
这个构造函数首先初始化了一些类成员,函数主体中发布了reset_integrator的服务,用于重置积分误差。下面是一个初始化参数的函数,里面对模型矩阵进行初始化并返回true。
模型矩阵定义:
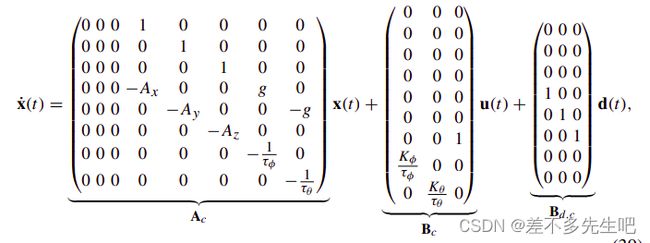
来源:Kamel M , Stastny T , Alexis K , et al. Model Predictive Control for Trajectory Tracking of Unmanned Aerial Vehicles Using Robot Operating System[J]. Springer International Publishing, 2017.
最后就是对mpc_queue_进行初始化,mpc_queue_就是一个装mpc解算出来的结果的容器,初始化直接将odometry的数据装入。
而LinearModelPredictiveControllerNode中的主函数中还有一个初始化,就是mav_control_interface::RcInterfaceAci。
这个类主要定义了遥控的一些函数,包括按键映射,设置Deadzone等,在构造函数里定义了一个rc_sub_用于订阅rc话题并调用回调函数,上面说的那些操作都在回调函数中完成。
到现在为止都还是一些初始化,定义话题之类的,真正的mpc解算过程还没出现。答案就在最后一句
mav_control_interface::MavControlInterface control_interface(nh, private_nh, mpc, rc);
可以看到这句也是构造了一个类,接下来就看看MavControlInterface这个类。
MavControlInterface::MavControlInterface(ros::NodeHandle& nh, ros::NodeHandle& private_nh,
std::shared_ptr<PositionControllerInterface> controller,
std::shared_ptr<RcInterfaceBase> rc_interface)
{
mav_control_interface_impl_.reset(new MavControlInterfaceImpl(nh, private_nh, controller, rc_interface));
}
类成员函数只有一个构造一个析构函数,又嵌套着另一个类:mav_control_interface_impl_,到了这个类才开始看到与发布轨迹相关的部分。下面是该类的成员函数:
public:
MavControlInterfaceImpl(ros::NodeHandle& nh, ros::NodeHandle& private_nh,
std::shared_ptr<PositionControllerInterface> controller,
std::shared_ptr<RcInterfaceBase> rc_interface);
virtual ~MavControlInterfaceImpl();
private:
static constexpr double kOdometryWatchdogTimeout = 1.0; // seconds
ros::NodeHandle nh_;
ros::NodeHandle private_nh_;
ros::Subscriber odometry_subscriber_;
ros::Subscriber command_trajectory_subscriber_;
ros::Subscriber command_trajectory_array_subscriber_;
ros::Timer odometry_watchdog_;
ros::ServiceServer takeoff_server_;
ros::ServiceServer back_to_position_hold_server_;
std::shared_ptr<RcInterfaceBase> rc_interface_;
std::unique_ptr<state_machine::StateMachine> state_machine_;
void CommandPoseCallback(const geometry_msgs::PoseStampedConstPtr& msg);
void CommandTrajectoryCallback(const trajectory_msgs::MultiDOFJointTrajectoryConstPtr& msg);
void OdometryCallback(const nav_msgs::OdometryConstPtr& msg);
void OdometryWatchdogCallback(const ros::TimerEvent& e);
void RcUpdatedCallback(const RcInterfaceBase&);
bool TakeoffCallback(std_srvs::EmptyRequest& request, std_srvs::EmptyResponse& response);
bool BackToPositionHoldCallback(std_srvs::Empty::Request& request, std_srvs::Empty::Response& response);
void publishAttitudeCommand(const mav_msgs::RollPitchYawrateThrust& command);
此处可以看到主要有3个订阅以及两个服务。由字面意思可以看出command_trajectory_subscriber_是订阅轨迹点,command_trajectory_array_subscriber_是订阅轨迹序列的,而odometry_subscriber_则是订阅Odometry相关数据的。
除此之外,两个服务分别是起飞以及恢复定点模式。其余函数都是定义回调函数。而构造函数中首先创建了订阅以及服务对象,接着是获取并应用相关的参数,比如rc_max_roll_pitch_command_,rc_max_yaw_rate_command_等。其中state_machine_又是另一个类,不得不说真是一环套一环阿。
这篇先到这吧,下一篇争取把剩余的部分总结完成。