HRNet源码阅读笔记(3),庞大的PoseHighResolutionNet模块
一、PoseHighResolutionNet源码
class PoseHighResolutionNet(nn.Module):
def __init__(self, cfg, **kwargs):
self.inplanes = 64
extra = cfg['MODEL']['EXTRA']
super(PoseHighResolutionNet, self).__init__()
# stem net
self.conv1 = nn.Conv2d(3, 64, kernel_size=3, stride=2, padding=1,
bias=False)
self.bn1 = nn.BatchNorm2d(64, momentum=BN_MOMENTUM)
self.conv2 = nn.Conv2d(64, 64, kernel_size=3, stride=2, padding=1,
bias=False)
self.bn2 = nn.BatchNorm2d(64, momentum=BN_MOMENTUM)
self.relu = nn.ReLU(inplace=True)
self.layer1 = self._make_layer(Bottleneck, 64, 4)
self.stage2_cfg = extra['STAGE2']
num_channels = self.stage2_cfg['NUM_CHANNELS']
block = blocks_dict[self.stage2_cfg['BLOCK']]
num_channels = [
num_channels[i] * block.expansion for i in range(len(num_channels))
]
self.transition1 = self._make_transition_layer([256], num_channels)
self.stage2, pre_stage_channels = self._make_stage(
self.stage2_cfg, num_channels)
self.stage3_cfg = extra['STAGE3']
num_channels = self.stage3_cfg['NUM_CHANNELS']
block = blocks_dict[self.stage3_cfg['BLOCK']]
num_channels = [
num_channels[i] * block.expansion for i in range(len(num_channels))
]
self.transition2 = self._make_transition_layer(
pre_stage_channels, num_channels)
self.stage3, pre_stage_channels = self._make_stage(
self.stage3_cfg, num_channels)
self.stage4_cfg = extra['STAGE4']
num_channels = self.stage4_cfg['NUM_CHANNELS']
block = blocks_dict[self.stage4_cfg['BLOCK']]
num_channels = [
num_channels[i] * block.expansion for i in range(len(num_channels))
]
self.transition3 = self._make_transition_layer(
pre_stage_channels, num_channels)
self.stage4, pre_stage_channels = self._make_stage(
self.stage4_cfg, num_channels, multi_scale_output=False)
self.final_layer = nn.Conv2d(
in_channels=pre_stage_channels[0],
out_channels=cfg['MODEL']['NUM_JOINTS'],
kernel_size=extra['FINAL_CONV_KERNEL'],
stride=1,
padding=1 if extra['FINAL_CONV_KERNEL'] == 3 else 0
)
self.pretrained_layers = extra['PRETRAINED_LAYERS']
def _make_transition_layer(
self, num_channels_pre_layer, num_channels_cur_layer):
num_branches_cur = len(num_channels_cur_layer)
num_branches_pre = len(num_channels_pre_layer)
transition_layers = []
for i in range(num_branches_cur):
if i < num_branches_pre:
if num_channels_cur_layer[i] != num_channels_pre_layer[i]:
transition_layers.append(
nn.Sequential(
nn.Conv2d(
num_channels_pre_layer[i],
num_channels_cur_layer[i],
3, 1, 1, bias=False
),
nn.BatchNorm2d(num_channels_cur_layer[i]),
nn.ReLU(inplace=True)
)
)
else:
transition_layers.append(None)
else:
conv3x3s = []
for j in range(i+1-num_branches_pre):
inchannels = num_channels_pre_layer[-1]
outchannels = num_channels_cur_layer[i] \
if j == i-num_branches_pre else inchannels
conv3x3s.append(
nn.Sequential(
nn.Conv2d(
inchannels, outchannels, 3, 2, 1, bias=False
),
nn.BatchNorm2d(outchannels),
nn.ReLU(inplace=True)
)
)
transition_layers.append(nn.Sequential(*conv3x3s))
return nn.ModuleList(transition_layers)
def _make_layer(self, block, planes, blocks, stride=1):
downsample = None
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(
self.inplanes, planes * block.expansion,
kernel_size=1, stride=stride, bias=False
),
nn.BatchNorm2d(planes * block.expansion, momentum=BN_MOMENTUM),
)
layers = []
layers.append(block(self.inplanes, planes, stride, downsample))
self.inplanes = planes * block.expansion
for i in range(1, blocks):
layers.append(block(self.inplanes, planes))
return nn.Sequential(*layers)
def _make_stage(self, layer_config, num_inchannels,
multi_scale_output=True):
num_modules = layer_config['NUM_MODULES']
num_branches = layer_config['NUM_BRANCHES']
num_blocks = layer_config['NUM_BLOCKS']
num_channels = layer_config['NUM_CHANNELS']
block = blocks_dict[layer_config['BLOCK']]
fuse_method = layer_config['FUSE_METHOD']
modules = []
for i in range(num_modules):
# multi_scale_output is only used last module
if not multi_scale_output and i == num_modules - 1:
reset_multi_scale_output = False
else:
reset_multi_scale_output = True
modules.append(
HighResolutionModule(
num_branches,
block,
num_blocks,
num_inchannels,
num_channels,
fuse_method,
reset_multi_scale_output
)
)
num_inchannels = modules[-1].get_num_inchannels()
return nn.Sequential(*modules), num_inchannels
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.conv2(x)
x = self.bn2(x)
x = self.relu(x)
x = self.layer1(x)
x_list = []
for i in range(self.stage2_cfg['NUM_BRANCHES']):
if self.transition1[i] is not None:
x_list.append(self.transition1[i](x))
else:
x_list.append(x)
y_list = self.stage2(x_list)
x_list = []
for i in range(self.stage3_cfg['NUM_BRANCHES']):
if self.transition2[i] is not None:
x_list.append(self.transition2[i](y_list[-1]))
else:
x_list.append(y_list[i])
y_list = self.stage3(x_list)
x_list = []
for i in range(self.stage4_cfg['NUM_BRANCHES']):
if self.transition3[i] is not None:
x_list.append(self.transition3[i](y_list[-1]))
else:
x_list.append(y_list[i])
y_list = self.stage4(x_list)
x = self.final_layer(y_list[0])
return x
def init_weights(self, pretrained=''):
logger.info('=> init weights from normal distribution')
for m in self.modules():
if isinstance(m, nn.Conv2d):
# nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
nn.init.normal_(m.weight, std=0.001)
for name, _ in m.named_parameters():
if name in ['bias']:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.BatchNorm2d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.ConvTranspose2d):
nn.init.normal_(m.weight, std=0.001)
for name, _ in m.named_parameters():
if name in ['bias']:
nn.init.constant_(m.bias, 0)
if os.path.isfile(pretrained):
pretrained_state_dict = torch.load(pretrained)
logger.info('=> loading pretrained model {}'.format(pretrained))
need_init_state_dict = {}
for name, m in pretrained_state_dict.items():
if name.split('.')[0] in self.pretrained_layers \
or self.pretrained_layers[0] is '*':
need_init_state_dict[name] = m
self.load_state_dict(need_init_state_dict, strict=False)
elif pretrained:
logger.error('=> please download pre-trained models first!')
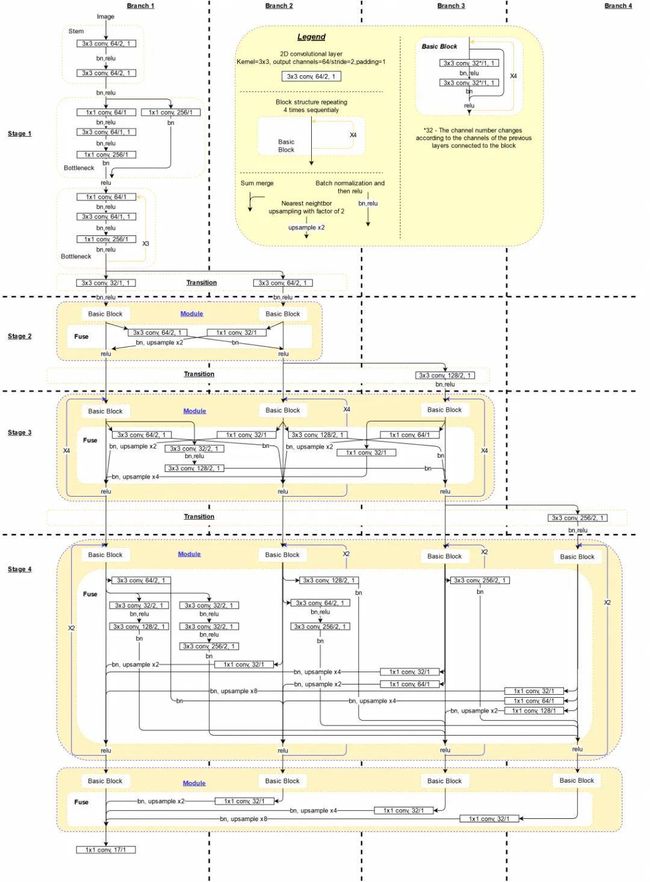
raise ValueError('{} is not exist!'.format(pretrained))二、网络结构图示:
来自: https://cloud.tencent.com/developer/article/1651826