HRNet源码阅读笔记(4),庞大的PoseHighResolutionNet模块-stage1
一、图和代码
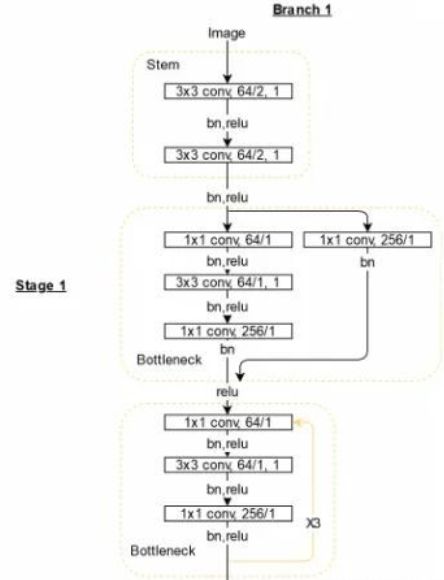
上一讲的图中,有stage1
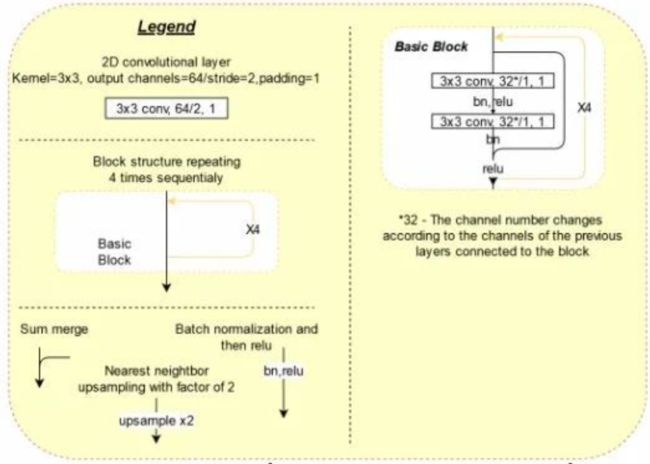
图例如下;
关键是看pose_hrnet.py中PoseHighResolutionNet模块的forward函数
相关部分如下:
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.conv2(x)
x = self.bn2(x)
x = self.relu(x)
x = self.layer1(x)其中涉及到的定义如下:
def __init__(self, cfg, **kwargs):
self.inplanes = 64
extra = cfg['MODEL']['EXTRA']
super(PoseHighResolutionNet, self).__init__()
# stem net
self.conv1 = nn.Conv2d(3, 64, kernel_size=3, stride=2, padding=1,
bias=False)
self.bn1 = nn.BatchNorm2d(64, momentum=BN_MOMENTUM)
self.conv2 = nn.Conv2d(64, 64, kernel_size=3, stride=2, padding=1,
bias=False)
self.bn2 = nn.BatchNorm2d(64, momentum=BN_MOMENTUM)
self.relu = nn.ReLU(inplace=True)
self.layer1 = self._make_layer(Bottleneck, 64, 4)其中,第14行_make_layer定义如下:
def _make_layer(self, block, planes, blocks, stride=1):
downsample = None
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(
self.inplanes, planes * block.expansion,
kernel_size=1, stride=stride, bias=False
),
nn.BatchNorm2d(planes * block.expansion, momentum=BN_MOMENTUM),
)
layers = []
layers.append(block(self.inplanes, planes, stride, downsample))
self.inplanes = planes * block.expansion
for i in range(1, blocks):
layers.append(block(self.inplanes, planes))
return nn.Sequential(*layers)还有,__init__第14行有个Bottleneck,定义如下:
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(Bottleneck, self).__init__()
self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(planes, momentum=BN_MOMENTUM)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride,
padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(planes, momentum=BN_MOMENTUM)
self.conv3 = nn.Conv2d(planes, planes * self.expansion, kernel_size=1,
bias=False)
self.bn3 = nn.BatchNorm2d(planes * self.expansion,
momentum=BN_MOMENTUM)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out这个Bottleneck,就是个残差网络。关于残差网络,推荐大家好好百度一下,值得明白他的基本想法。
注意两点:
Bottleneck和basicblock两回事
self.layer1 = self._make_layer(Bottleneck, 64, 4)最后一个参数,说的是,重复4次。
二、魔性的_make_layer
_make_layer定义中的第3行条件,既:
if stride != 1 or self.inplanes != planes * block.expansion:对于 self.layer1 = self._make_layer(Bottleneck, 64, 4),满足吗?
首先,stride=1,前一半不满足了。
其次,self.inplanes=64,而planes=64,block.expansion=4.后一半满足了!
那么downsample就会被执行了。
通俗滴说,layer1的输入与输出,特征维度不一样多,为了残差,就需要下采样!
这里的下采样,你看,kernel_size=1,所以,目的不是分辨率,而是特征维数的统一。
看看这些代码,跟示意图,对的上号吗?我觉得稍有差异。不求甚解了,继续往后看!